

利用单片机控制步进电机的轮胎模具内径测量系统设计
控制/MCU
描述
轮胎模具用于成型轮胎,其加工质量对轮胎的生产非常重要。为了生产出好的轮胎,必须对轮胎模具加工质量提出高的要求。传统的加工质量检测法主要是靠百分表,人为采集数据后分析得出加工质量报告。这种办法的局限性是需要操作者有一定的工作经验,而且取样过程人为控制,精度受到一定影响。近几年来,轮胎模具工业随着轮胎的大量需求而得到了快速发展,传统的检测方法不能满足市场需求。光栅尺是一种数字位移测量设备,测量范围可达几十米,测量精确在微米级;激光测距仪是一种非接触测量设备,可以对不规则表面的目标位移进行测量,但是测量距离较小。将大范同的光栅尺和非接触测量的激光测距仪结合起来就可以实现对不规则面的目标距离进行测量。将光栅尺读头与激光测距仪固定在机械横梁上,运用步进电机控制横梁的运动,分别对模具不同层面的内径进行测量。
系统采用AVR单片机实现控制步进电机和光栅尺数据读取,通过接收上位机的控制命令,AVR单片机控制步进电机运动,数显表数据和激光控制器位移数据自动经串口发送给上位机,从而完成对模具内径的自动测量。
1 系统组成
基于AVR的轮胎内径测量系统主要由AVR单片机、上位机、光栅尺、数显表、激光测距仪、驱动器、步进电机、电子手轮、行程开关等组成。其功能框图如图1所示。
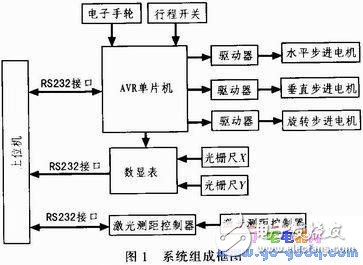
单片机选用的是爱特梅尔公司的ATmega16;上位机采用研华公司生产的ARK3360L工控机,它拥有多个RS232接口;激光测距仪采用的是日本基恩士公司的LK-G85激光测距传感器和LK-G3001V激光测距控制器,其分辨率为0.1μm,测量范围-15~+15 mm,测量距离为80 mm;光栅尺采用广州诺信数字测控设备有限公司的KA300型系列光栅位移测量设备,读数由其公司的SDS6型数显表实现。最终的内径计算由上位机接收到激光测距仪数据和光栅尺数据后完成。
2 系统功能分析
2.1 模具内径测量方法
轮胎模具置于静止的工作平台之上,旋转测量平台处于工作平台的中心位置,在旋转测量平台上的横梁和立柱可以沿径向和垂直两个方向移动,激光感测头置于测量横粱上。根据轮胎模具的内径不同,沿径向移动测量横梁,将激光感测头移动至测量范围内,即可测得激光感测头至轮胎模具内圆的距离,再通过利用光栅尺测量横梁径向移动的距离,换算出轮胎模具的内径。通过控制电机旋转测量平台,就可以按照节距逐一测量轮胎模具内径,从而得到轮胎模具的圆度。将测量横梁沿立柱垂直移动,就可以测量轮胎模具不同垂向高度的内径,从而得到模具的圆锥度。
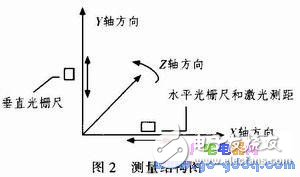
测量系统一共有3个步进电机控制测量设备沿3方向运动;两把光栅尺读取水平和垂直位移数据,还有激光测距仪实现非接触位移测量,其测量结构如图2所示。
2.2 测量原理和功能实现
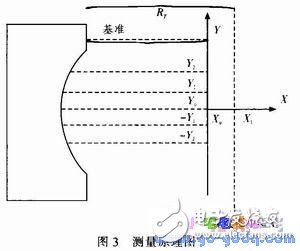
轮胎模具花纹块剖面如图3所示:花纹块最上边的是模具胎口,其加工的误差一般较小,选取作为基准。设胎口离花纹块中心线X1的距离为RT,把这个内圈设定为基准圈。轮胎模具内径测量是基于模具胎口半径RT已知的前提下,由程序控制整个测量过程。
在保证待测模具的平面度和同心度状态下,调整转动电机和垂直位移电机,使得激光感测头位于被测点上方的已知胎口直径位置。调整水平位移电机,使得激光感测头与胎口被测点的水平距离为80±0.5 mm,激光传感器在这个距离下测量精度最高。
根据胎口半径RT和胎口被测点的激光测距值、水平光栅尺读数,可以得到如下等式:

其中,XL是激光测距值,XR是水平光栅尺读数,这两个值可以多次测量取平均,XS是系统装配和放置待测模具时的固有值,即如图设备中心X0离花纹圈中心X1的距离,相对于垂直方向的每个被测点而言,XS在整个测量过程中是不变的,因此可以得到下式:

当测量臂垂直移动至待测模具被测点的垂直位置后,平移激光感测头至距离被测点80±0.5 mm处,然后读取被测点的激光测距值XL’和水平光栅尺读数XR’,则被测点的半径满足:

只要按照上述方法逐点测量和计算出各个被测点的直径,就可以完成圆度测量了。
在整个测量过程中,由于要避开模具的花纹,因而对测量点有一定的要求。使用ATmega16精确控制步进电机运行可以找到待测点,并在此基础上加入手轮控制器微调步进电机找到合适位置后再采集数据,这样就可以对人为设定的测量点进行测量。
2.3 设备的行程控制
在测量设备水平和垂直移动极限位置处放置行程开关来保证运行安全,为了降低成本,通过测量转盘的所有信号没有采用电滑环而使用电缆直接连接。因此设备在旋转时不能总是沿一个方向旋转,否则会扭断电缆。本设计中旋转角度不超过360°,为了区分旋转的0°和36 0°,在测量转盘指定的位置处分别放置两个并排的行程开关。通过判断这两个行程开关动作的先后次序来确定旋转的位置,然后决定可旋转的方向。
3 单片机设计
主要思路:上位机对电机进行测量步骤的控制,通过发送命令使步进电机沿设计思路正确测量数据。而在某些测量点上,需要人工干预时通过转动手轮即可微调电机。而行程开关可以限制机械转动的位置,也可以用于复位设置。
3.1 步进电机的驱动
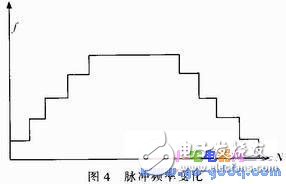
步进电机的运行要有步进电机驱动器,把控制系统发出的脉冲信号转化为步进电机的角位移。步进电机的转速与脉冲信号频率成正比,步进角度与脉冲数目成正比。步进电机启动时,必须有升速、降速过程,升降速的设计至关重要。如果设计不合适,将引起步进电机的堵转、失步、升降速过程慢等问题。为了实现升降速,用阶梯型频率变化来模拟频率线性变化过程。如图4所示。
步进电机脉冲的产生由定时器1和定时器2实现,ATmega16控制器接收到上位机的命令后,首先获取需要转动的步数,然后根据相应命令打开相应定时器的计数功能。控制程序中用定时器1控制二路脉冲输出,定时器2控制一路脉冲输出,从而完成3路电机的控制。
定时器2使用CTC模式,匹配中断使能。通过匹配中断,在OCR2端口可以输出脉冲,通过设定寄存器OCR2寄存器的值可以改变输山脉冲频率。定时器1使用相位与频率修正模式,在不同串口命令下分别设置ICR1、OCR1A和OCR1B寄存器的值并打开不同的匹配中断,从而可以分别在OC1A和OC1B端口输出匹配脉冲。其输出频率控制和定时器2原理一样,只是还需要改变计数上限值ICR1。由于3路电机不同时运动,因此每次只有一个定时器处于打开状态,其余则需要关闭。
在程序运行中,设置了一个全局变量保存电机运行的步数。在收到上位机的命令后,控制程序首先将该步数写入片内EEPROM中再执行。由于EEPROM数据掉电不丢失,因此系统掉电后复位时可以从EEPROM中取出数据然后执行下一次操作。
3.2 手轮微调控制
手轮的作用主要是实现微调设备找到合适的测量点。电子手轮一共有两路脉冲输出,两路脉冲相位差决定了手轮的旋转方向。手轮的控制采用定时器0,使用计数模式。定时器0没置为CTC模式,上升沿触发,OCR0为1,计数初始值为0,中断使能。当外部上升沿触发时计数到1时触发中断,在中断子程序里面根据手轮状态产生相应的脉冲输出。
在手轮中断子程序中,首先将计数器自动清零等待下一个手轮脉冲。然后判断正反信号和手轮档位状态,ATmega16根据状态信息通过延时方法产生一定数量的脉冲控制步进电机。手轮状态共有Z、Y、X 3个方向,X1、X10、X100 3个档位。若手轮在X档位则在相应端口(该端口同时也是定时器脉冲输出口)输出一定数目的脉冲。改变延时的大小可以改变输出频率,但是由于延时输出脉冲的最大频率决定于晶振,因此输出脉冲受到一定影响。延迟方法产生的脉冲不能精确控制步进电机的步进角度,但是可以用于微调。
手轮的正反信号通过D触发器来判断。将手轮脉冲A作为CLK信号,脉冲B为CP信号,复位端和置位端接高电平。当手轮正转时脉冲A脉冲与脉冲B的相位差为正90度,D触发器输出高电平;若反转A脉冲与B脉冲的相位差为负90度,输出低电平。
3.3 串口模块
上位机和单片机主要采用UART异步通信,收发按字节处理。单片机接收上位机命令时采用UART查询方法实现数据接收。其通信格式为:起始字+控制字节+步数+结束字,数据使用国际通用标准ASCII码格式,如表1所示。
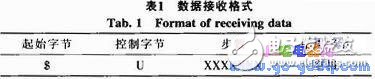
设计过程中使用ICCAVR编译器编写单片机控制程序,可以使用atoi函数将ASCII码格式步数转化为整型数据。
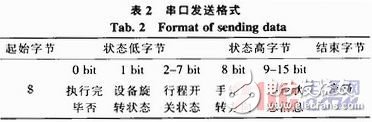
单片机对上位机通信主要是使用两个字节数据发送手轮状态信息和行程开关状态信息。单片机在接收到查询命令后,将两字节状态信息返回给上位机,每次执行步进电机命令后也需要向上位机发送状态信息,将执行结果返回给上位机。其定义如表2所示。
4 结束语
文中基于AVR单片机设计了一套轮胎模具内径测量系统,可以接收电子手轮和上位机信息分时控制多路步进电机并能控制光栅尺读数。
该系统设备经过安装后,选取标准钢板作为测试目标,在垂直方向选定若干个测试点,结果证明其测量误差在2μm以内。然后选取子午线轮胎模具作为测试目标,与人工测量数据进行对比,测量误差在4 μm以内,达到设计要求。
-
利用MSP430单片机控制步进电机2024-10-09 418
-
5分钟实现单片机步进电机控制设计2022-02-11 1691
-
求一种基于 AVR 单片机实现轮胎控制系统的设计方案2021-11-23 643
-
单片机控制步进电机-电路连接2021-11-08 1960
-
如何利用单片机去控制步进电机?2021-07-07 3369
-
AVR单片机实现轮胎内径测量系统的设计2020-03-06 1457
-
基于AVR单片机的轮胎内径测量系统设计2019-09-30 1095
-
巧用avr单片机设计轮胎内径测量系统2017-12-12 6743
-
基于单片机的步进电机控制系统2016-05-25 1114
-
基于单片机的步进电机控制系统的研究2016-01-04 741
-
基于AVR单片机的轮胎模具内径测量系统2012-07-12 1125
-
基于单片机的步进电机开环控制系统2009-08-25 922
-
PLC在轮胎模电火花成型机中的应用2009-06-18 758
-
单片机控制步进电机的原理2009-03-30 85917
全部0条评论

快来发表一下你的评论吧 !
