

指纹识别中的图像处理研究--指纹图像的特性分析(一)
触控感测
描述
2 指纹图像的特性分析
一副指纹数字图像是一个二维阵列,其阵列的元素值称为灰度值或者亮度值,在指纹图像还没有被量化成数字图像之前,它是一个连续亮度函数的集合,指纹的特征信息就包含在这些亮度值中,在现有的指纹取像器件中,大部分是将指纹图像量化成256个不同灰度级,也有32个灰度级的,对于确定身份的指纹识别技术而言,256个灰度级是应用最广泛的,本论文所指的指纹图像如无特殊说明均指256个灰度级的指纹图像。图2.1所示的是一个256灰度级的数字指纹图像。
2.1数字图像的几何特性
对一幅数字图像,如果要对其中包含目标物体进行识别和定位,经常使用图像区域的一些简单的特性,如大小、位置、方向,如果目标物体的尺寸和形状完全不同,则可以利用尺度和形状特性来识别目标物体。下面分别对数字图像的大小、位置、方向进行说明。
2.1.1尺寸和位置
对于一幅m×n二值图像B[i,j],其目标区域的面积A(或零阶矩)由公式(2.1)给出,目标区域的位置,用区域中心位置(x,y)表示来,目标区域中心(x,y)可以用公式(2.2)来表示,将公式(2.2)进一步化简可得到区域中心的计算公式(2.3)。
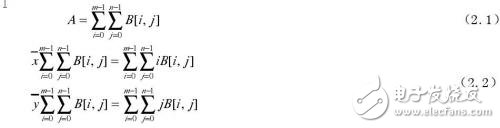
其中x和y是目标区域中心在图像中的行数和列数

由上式可以看出,区域中心是通过对图像进行全局运算得到的一个点,因此它对图像中的噪声相对来说不敏感。
2.1.2 方向
计算目标物体的方向比计算它的位置要复杂,某些形状(如圆)的方向不是唯一的,为了定义唯一的方向,一般假定物体是长形的,其长轴方向被定义为物体的方向。通常地,二维平面上与最小惯量轴同方向的最小二阶矩轴被定义为长轴。图像中物体的二阶矩轴是指这样的一条直线,物体上的全部点到该直线的距离平方和最小,以二值图像B[i,j]为例,图像上目标区域到最小二阶矩轴的距离平方和χ2可用公式(2.4)表示。其中rij是目标区域点[i,j]到直线的距离。在直线的点斜式表示中,当直线处于近似垂直时,斜率的数值趋于无穷大,为了避免直线处于近似垂直时的这种数值病态问题,把直线表示成极坐标的形式,如公式(2.5)

所示如图2.2所示
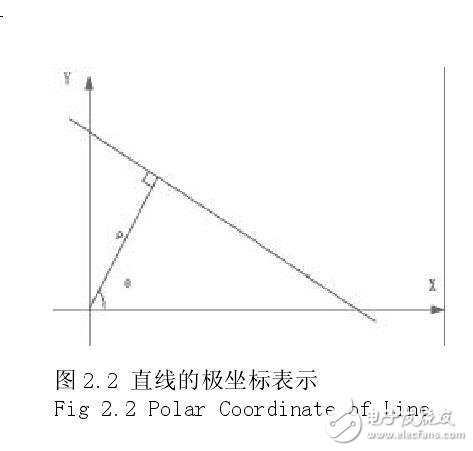
θ是直线的法线与x轴的夹角,ρ是直线到原点的距离,把图像中的点[i ,j]坐标带入直线的极坐标方程即可得出距离r,如公式(2.6)所示

将式(2.6)带入式(2.4)可得式(2.7)

为了求得χ2最小时的常数ρ、θ值,可先对公式(2.7)求导数,令χ2对ρ的导数等于零,则可以得到公式(2.8)

化简公式(2.8)
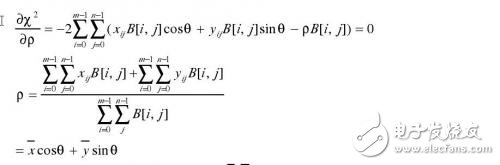
上式说明回归直线通过物体中心( x ,y)。将ρ的值带入式(2.7)并且化简如
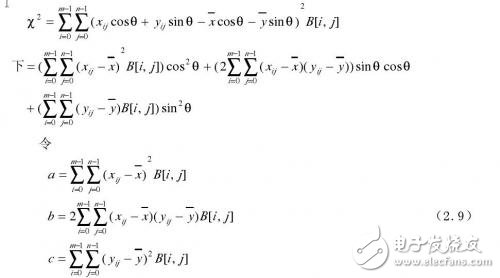
则

对式(2.10)中χ2微分,并且使微分结果为0,则得到式2.11
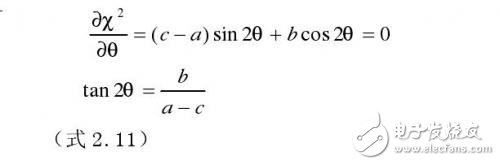
因此惯性轴的方向还可以用下面的公式给出
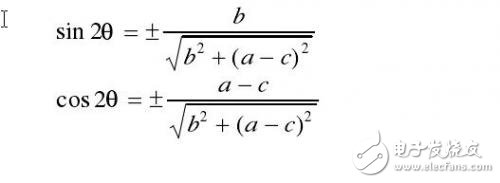
由式2.12可以确定4个θ值,其中当θ取上述值时,χ2的取值可能是最小值,也可能是最大值,当χ2取最小值时的θ值即为惯性轴的法线方向与x轴的夹角,这时方向轴可以唯一的确定。如果式2.12中b = 0, a=c,那么方向轴的方向就不是唯一的,因此方向轴就不能够确定,或者说该目标区域没有主方向。
-
用FPGA实现优化的指纹识别预处理算法2009-09-19 5461
-
新唐指纹识别2015-01-27 5177
-
【OK210申请】基于指纹识别的电子密码锁识别研究2015-07-19 1989
-
【TL6748 DSP申请】指纹图像处理项目、摄像头视频还原项目、音频算法研究项目2015-09-10 2726
-
指纹识别算法2016-08-23 4287
-
基于STM32指纹传感器FPS200的指纹识别系统解决方案2018-08-29 7411
-
基于FPC1011C的指纹识别模块2018-11-05 3751
-
八大角度读懂指纹识别2018-11-08 2636
-
指纹识别技术原理及发展2018-11-12 3839
-
指纹图像有哪些特性?求解2021-06-01 1179
-
指纹图像分割方法的研究2009-05-30 747
-
基于滤波和融合的指纹图像增强算法2009-06-26 613
-
指纹图像分割与增强算法的研究2013-04-08 990
-
基于Curvelet的指纹图像识别2017-11-03 887
-
关于指纹识别技术的基本原理知识及过程详解2018-07-28 30493
全部0条评论

快来发表一下你的评论吧 !
