

BIM机器人的介绍以及应用玩法
电子说
描述
什么是BIM机器人
BIM机器人基于BIM的现场3D激光测量放样技术。它是采用“BIM云平台数据同步及BIM云链接测量”技术实现BIM模型与现场构件的对应关系,通过“激光标记棱镜杆系统”技术,提高棱镜投射点定位速度和精度,通过“连接平板电脑与棱镜杆装置”技术实现了3D测量技术能单人操作完成。

BIM机器人怎么玩的
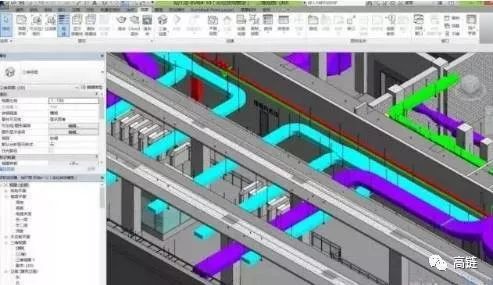
首先,通过BIM建模,对模型进行优化及碰撞检查,确定模型可利用施工后,按规范及现场要求设置机电管线的支吊架等附件,使得模型能够达到施工标准。
放样定为模型
同步至移动端界面
利用审核完的施工模型,建立定位放样模型。在模型上创建虚拟坐标系并设立控制点。然后确定需要放样定位的点,如支吊架安装点,水管或风管的中心位置等,在模型中根据不同专业管线要求放置放样定位点,形成放样定位模型,并上传至云端,IPAD可同步模拟。


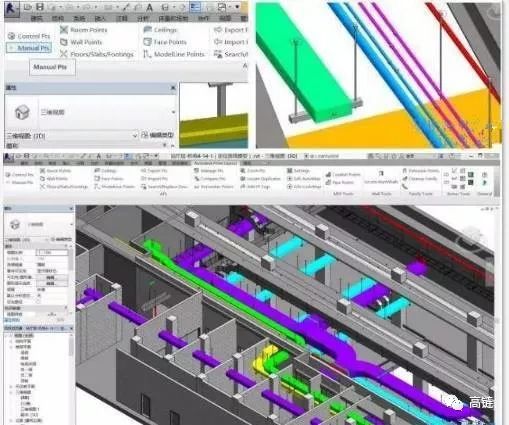
棱镜杆系统(投影至天花平面)
利用BIM机器人现场设站,按顺序组装好棱镜杆系统,并根据所定位的点所处的工作面,选择棱镜和激光放线仪的位置。棱镜杆系统通过与激光放线仪的相互配合,结合“测量放样应用程序”定位的虚拟棱镜位置,将棱镜杆移动至定位点附近,通过精调将软件中虚拟棱镜与定位点重合,此事棱镜所在位置即模型中定位点在现场的准确位置,此时激光放线仪的投射激光,就是定位点在现场工作面的位置。

BIM机器人好在哪

传统测量方法无论是经纬仪、全站仪、GPS测量、相对位置测量技术,均需要对图纸进行分析和数据计算后再进行测量定位,且需要多人写作操作才能完成。此外,传统方法均无法与BIM模型建立有效链接,很难保证模型与现场构件一致,BIM技术在深化设计、施工、运维阶段应用大打折扣。
机器人实现了对BIM模型与现场构件一致性的控制,填补了国内外BIM模型对现场构件精确定位的空白,使得BIM模型能更加有效的应用到深化设计、施工、运维等各个阶段,且施工工艺简单,工效高,成本低、安全、节能环保。
-
【卡酷机器人】——面向儿童教育2015-01-13 10758
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
nao机器人与其他机器人的区别2015-02-13 7018
-
三菱机器人初级培训班--华南机器人应用中心2015-03-03 7988
-
机器人技术以及业务交流2015-06-30 4307
-
工业机器人应用广泛2017-09-07 3787
-
先进机器人控制2017-09-19 4639
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4156
-
桁架机器人核心配件介绍2018-11-22 3503
-
Budgee机器人介绍2020-08-26 3071
-
Motoman机器人离线编程2021-09-07 2347
-
机器人Python仿真软件介绍2021-12-20 1893
-
PDF——工业机器人技术及应用2022-10-16 27545
-
电机驱动的扫地机器人介绍2022-11-09 2632
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2649
全部0条评论

快来发表一下你的评论吧 !
