

基于CMOS APS和SoPC芯片 设计了微小型星敏感器的光学及电学系统
电子说
描述
星敏感器是所有敏感器中最为精密而且漂移最小的,是航天飞行器中重要的定姿系统。使用CMOS作为星敏感器的传感器器件已经是现在的主流方向,国产星敏感器与国外先进技术存在着较大的差距,使用国产化器件,拥有自主知识产权的微小型化星敏感器已经变得迫在眉睫。本文以某国产化CMOS APS芯片和SoPC控制芯片设计星敏感器,对其光学及电学系统进行研究设计。
1 星敏感器设计
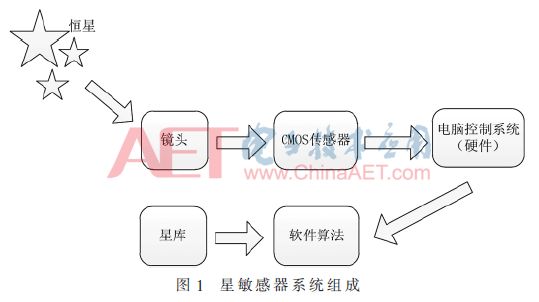
星敏感器系统由遮光罩、光学镜头、敏感器芯片及外围电路、数据处理器和电脑控制系统组成,其组成框图如图1所示。
1.1 光学系统设计
本文中使用的CMOS APS传感器为某国产型号B1XXX,电路中各项功能、指标、参数、封装形式、引脚定义均兼容最常用的美国CYPRESS公司STAR1000产品,其参数见表1。

星敏感器光学系统参数会根据不同的应用环境而有所不同,它主要由以下几点确定:传感器的像元尺寸、光谱响应特性、所需探测的最高星等。光学系统的参数需要设定的有镜头的焦距、光谱范围、弥散斑尺寸、通光孔径、中心波长透过率等[1]。
1.1.1 视场角的确定
视场角是确定光学镜头能够探测到星空最大范围的指标。在同等条件下,视场角越大,能够观测到的星数越多。但是过多的星数会干扰后续的计算,所以选择合适的视场角是构建光学系统的第一步。
本文使用的APS CMOS传感器是某国产芯片。像元尺寸15 μm,分辨率1 024×1 024,工作波长范围选定为400 nm~780 nm。要求在任意姿态下捕获4颗以上导航星的概率达到99%,以便后续计算[2]。根据这一数据要求,通过编程处理星表,可得在给定视场内观测到各个星等的数量。进一步统计当星等为5.5等时,选取视场角为20°×20°能够满足在任意视场内观测到4颗及以上星星这一条件。故选取20°×20°作为视场角。
1.1.2 焦距的确定
焦距是确定成像平面到镜面的距离。由于选取的物体远近不同,焦距会产生相应的变化。在太空中,星星的位置与距离相对固定,所以与普通的相机变焦不同,星敏感器的焦距是固定的。现有光学系统视场和焦距关系式为:
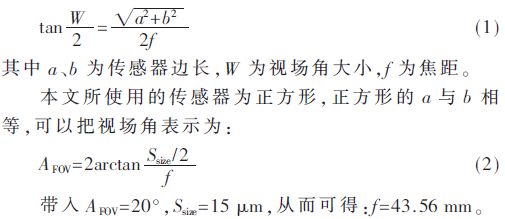
1.1.3 弥散斑尺寸的确定
本文以 20°×20°的视场角为例,采用1 024×1 024 像元,则单个像元仅能达到20/1 024≈0.019 5°≈70″。为了提高像元测算的精准度,需要将传感器接收到的图像进行离焦,使像点弥散开来,从而使能量扩散到周围的数个像元。将多个像元的能量信号进行汇总,根据一定的算法,共同计算并获取星点的位置。这样做的目的是使得星点位置不仅仅从单个像元上获得,而是能够达到亚像元级别。即亚像元内插星点提取方法[3]。目前常用的弥散斑尺寸大小有2×2像元或者3×3像元,使用大的弥散斑尺寸能提高定位精度,但会影响到后续的计算速度。本文采取2×2像元大小作为弥散斑尺寸。
1.1.4 相对孔径的确定
孔径与焦距用相对孔径F表示,即F/#=f/D。国标GB/T 30111-2013中,对相对孔径的定义是入瞳直径与焦距的比值,即D/f,其数值在1/0.8~1/6之间选取。
F/#的计算由以下公式给出[4]:

其中Vth为信噪比,取值5;Id为暗电流噪声;
1.2 电学系统设计
1.2.1 CMOS APS传感器分析
本文所用的B1XXX是一款具有1 024×1 024分辨率的抗辐射CMOS图像传感器,像素尺寸为15 μm×15 μm。电路各项功能、指标、封装形式、引脚定义均兼容美国CYPRESS公司的STAR1000产品。片内集成了双采样技术、可变增益放大器(PGA)以及12位模数转换器(ADC)。且片上ADC电学可隔离,既可以采用片上ADC数字量化输出,也可以依据用户需求,直接输出光模拟信号。
电路具有智能窗口功能,即像素阵列的X、Y地址可随机编程,实现对窗口大小、起止地址的随机控制;具有高灵敏度(≥2.7 V/lux·s(@550 nm)),可适应空间微光环境需求;具有1、2、4、8倍可编程增益,可以根据光照强弱控制输出增益,适应更宽工作环境;具有双斜积分功能,可大大提高动态范围,从而提高同一环境下强光弱光同时存在时的适应性;抗辐射总剂量能力≥100 Krad(Si),抗单粒子闩锁LET≥75 Mev·cm2/mg。
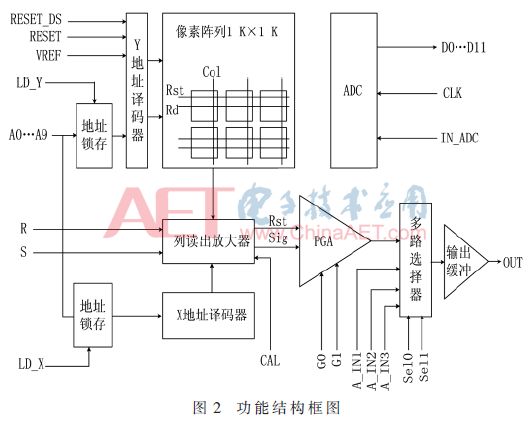
器件结构及特点:B1XXX的功能结构框图如图2所示。该图像传感器主要包含6个部分:像素阵列、寻址逻辑、前置列放大器、可编程增益放大器(PGA)、模拟多路选择器和ADC。
1.2.2 FPGA时序驱动模块
焦平面图像传感器的选择直接关系到星敏感器的核心设计。
本系统利用FPGA实现对CMOS图像传感器的驱动、CMOS图像传感器与处理器系统的接口,以及星图存储或星图预处理等功能。单时钟全同步的设计被设计中所使用,外部20 MHz晶振提供了时钟输入来源,内部则进行分频处理。这一较为复杂的时序逻辑能够通过编程得以实现[5],如图3所示。

1.2.3 信号处理方案
信号处理板采用了国产SoPC核心信号处理板,该核心板基于国产SoPC进行二次集成开发,将SoPC最小应用系统、基础配置电路和通信接口模块集成在了尺寸为51.4 mm×51.4 mm的小型SoC板上。其中SoPC芯片总体结构框图如图4所示。
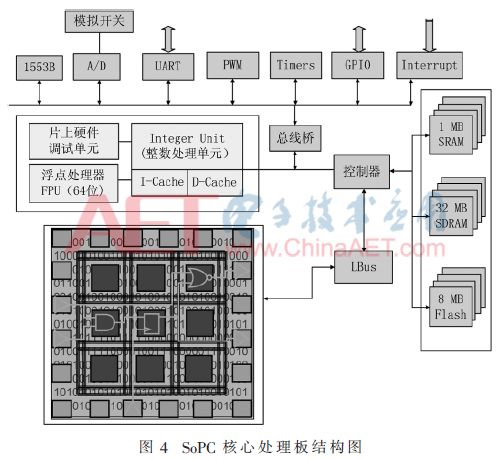
此外,核心信号处理板还包括了基础的配置及与应用系统的通信接口,主要包括:PLL配置、调试接口配置、复位模块、时钟模块、FPGA配置等。通信接口主要包括:1553通信接口、ADC接口、串行通信接口、可扩展GPIO接口、中断接口、I2C总线、定时器/计数器输入/输出接口、测试与指示接口等。这些基本可以满足星敏感器的软件需求。
最终设计方案为:将星敏感器电学系统(不含外壳)尺寸小型化到60 mm×60 mm,2块电路板重量(含紧固件)共计约60 g,静态功耗约1.2 W。
2 APS星敏感器软件方案
星敏感器的软件算法主要包括星库建立、星图预处理、星图识别与星图匹配、姿态解算等部分。
(1)星库建立
星库是根据星表筛选后建立的导航星的集合,其作用是在进行星图匹配时提供匹配的依据。确定好星表后,就可以根据星表建立起相应的导航星库。
(2)星图预处理
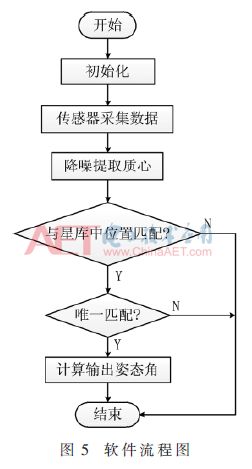
在传感器获得图像之后,由于各种噪声的存在,需要在处理数据之前进行降噪,随后将星点质心提取,提供给星图识别算法。
在实际应用中采用了简单的平均值去噪方法。由于固定噪声的数值在一定范围内不规律地呈现,故可以取其平均值作为系统的固定噪声,再用采集的图像与平均值求差,可以得到初步的降噪效果。具体方法为:使用星敏感器系统连续拍摄在黑暗条件下的图片,获取其中噪点的信息,包括位置及数值。在同一位置获得的噪点信息,使用平均值法算出均值作为其最终数值。
由于积分时间不同,固定噪声呈现出的噪点会有略微不同。统计在积分时间为10 ms、50 ms、100 ms的情况下,采用10次平均值方法得出的平均噪声与实际的差值。
在采集全黑的图片时,固定噪声干扰会带来大约3.6%左右的影响。噪声灰度值集中在08~10左右。当使用平均值去噪方法后,噪声灰度值集中在00~02左右。表2为不同积分时间下使用平均值去噪的效果。

(3)星图识别与星图匹配
在提取质心信息后,在导航星库中搜索识别相同信息的导航星,如果获得唯一匹配的导航星,则匹配成功。
(4)姿态解算
当匹配成功后进行姿态解算,算出当前的姿态角或四元数数据,输出结果。
图5为星敏感器软件流程图。
3 结论
本文根据某国产抗辐射COMS APS芯片和SoPC控制芯片,设计了微小型星敏感器的光学及电学系统。根据现有的传感器特性,有针对性地选择合适的光学系统参数,并得出其确定参数。光学系统在确定了视场角和APS传感器之后,就可以依次得出焦距、相对孔径等参数。星敏感器根据硬件及系统的要求,设计了FPGA驱动模块和信号处理模块。星敏感器硬件完全国产自主化,并符合GB/T 30111-2013中对于星敏感器的要求,软件部分根据现有的器件参数进行编程。最后,设计并完成了一套国产化星敏感器实验原理样机。
-
 jf_1137202360
2021-03-29
0 回复 举报感谢分享 收起回复
jf_1137202360
2021-03-29
0 回复 举报感谢分享 收起回复
-
切换变倍光学系统设计2010-04-26 2089
-
OCAD光学系统自动设计程序2020-03-23 2391
-
光盘驱动器电学系统设计与实验2010-05-24 692
-
CMOS APS实现高精度太阳敏感器2011-09-30 1179
-
光学自动设计及光学系统的分析2017-11-17 1445
-
基于二维MEMS扫描振镜的激光雷达设计了发射光学系统和接收光学系统2020-09-01 12835
-
高斯光学,理想的光学系统2021-06-01 5614
-
CMOS图像传感器的光学和电学特性仿真研究2022-10-19 2956
-
光学系统低误差敏感度设计方法的研究现状与进展2022-11-14 2994
-
光学系统设计流程2023-06-13 1835
-
光学系统的基本特性2023-06-14 2618
-
折衍射混合成像光学系统设计2023-07-02 1909
-
折反式变形光学系统设计2023-08-30 1257
-
基于离轴成像光学系统的设计2023-09-10 3277
-
光学系统设计过程2024-01-23 1294
全部0条评论

快来发表一下你的评论吧 !
