

SerDes芯片在汽车领域中的应用
描述
佐思汽研发布《2024年下一代Zonal通信网络拓扑及芯片行业研究报告》。
车载通信架构在汽车E/E架构中扮演连接的角色,随着汽车E/E架构的演进,车载通信技术也随之不断发展,通信技术发展的核心是通信接口协议。基于下一代Zonal架构的车载通信框架中:
总线通信:主要包括车载以太网(10M/100M/1000M/2.5G/5G/10G等)、CAN-XL、CAN-FD等。CAN-XL/CAN-FD总线通信的底层是收发器芯片,车载以太网芯片则包括物理层PHY芯片和交换机芯片。Zonal架构下,汽车的骨干网络将采用车载以太网,局部低速网络短期内仍将继续使用CAN-FD/LIN,待10Base-T1S车载以太网和CAN-XL产品规模化后,可能会成为Zonal架构中低速网络的主要应用。
高速视频流通信:目前车载SerDes芯片有多种协议,主要包括FPD-Link、GMSL、MIPI A-PHY、ASA-ML等。汽车高速视频流传输采用串行传输技术,需要SerDes串行器/解串器来实现,主要应用场景包括摄像头到ADAS SoC的视频传输、座舱SoC到车载显示屏的内容传输。
近距无线通信:主要包括蓝牙、WIFI、NFC、UWB和星闪等,主要应用场景包括手车互联、数字车钥匙、无线BMS等。
片间通信:主要有PCIe、NVLink等协议,在中央超算+Zonal架构下,多SoC片间级联应用较多,PCIe主要用于CPU与GPU之间的通信,NVLink主要用于GPU与GPU之间的通信。
Zonal架构的车载通信网络拓扑
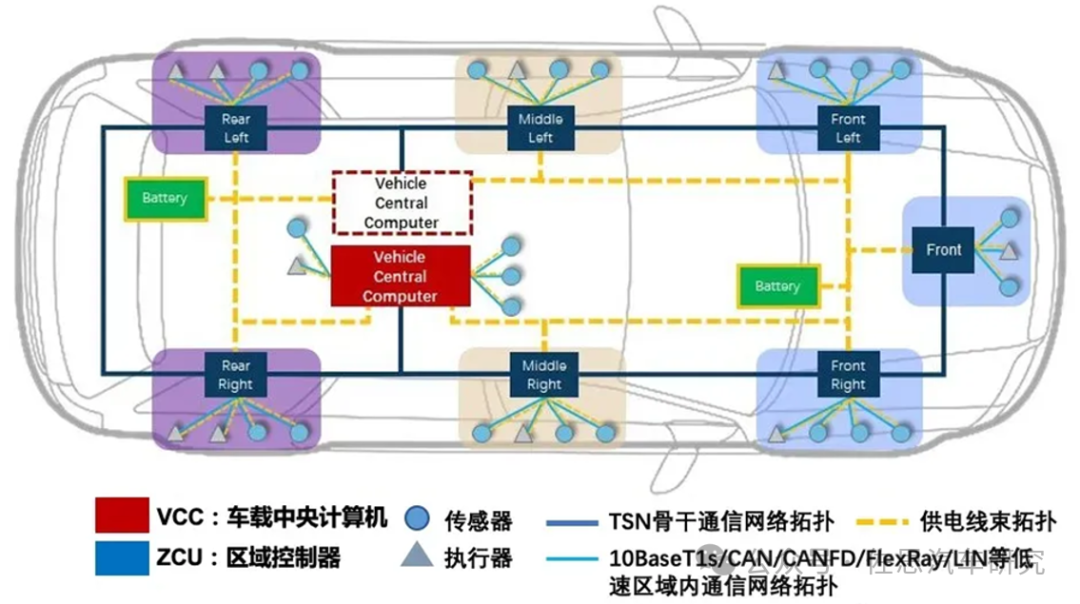
来源:沃尔沃
高速视频流通信:车载SerDes芯片如何助力车企降本增效?
车载SerDes芯片主要用于车载摄像头到ADAS域控制器、座舱域控制器、车载显示器等的图像和视频信号的实时数据传输,通常由Serializer(串行器)和De-serializer(解串器)两颗芯片组成,串行器和解串器之间要有一套完整的通讯协议才能实现数据完整、安全、无误的传输。
SerDes芯片在汽车领域中的应用
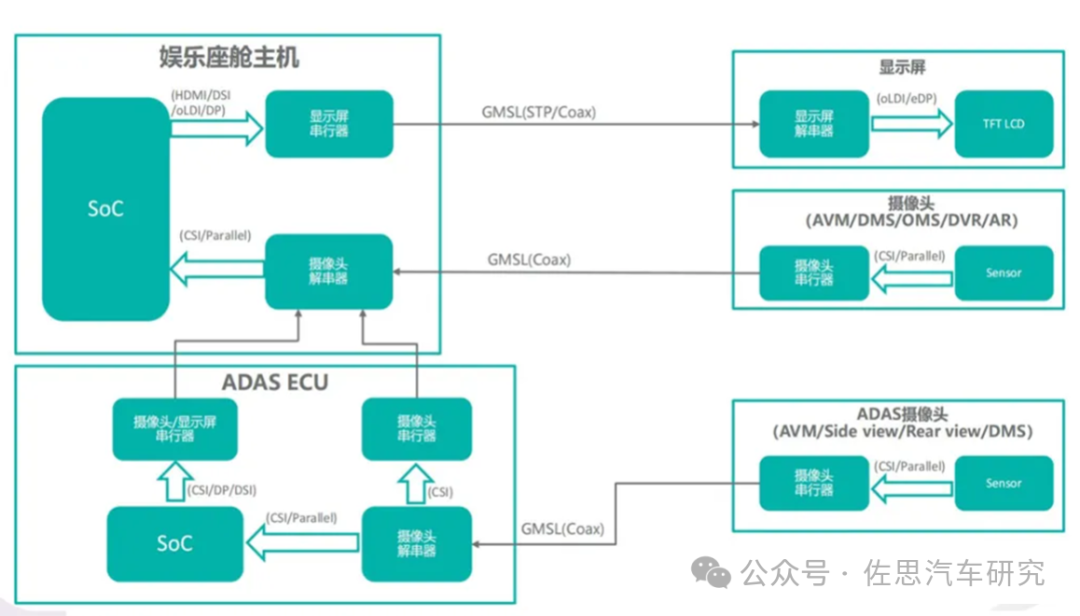
来源:ADI
10G+车载SerDes通信的必要性:10G+车载SerDes芯片的发展,与汽车中央集成+Zonal架构、端到端自动驾驶、车载显示贯穿一体屏及超高清画质等发展趋势息息相关。
高清摄像头端:在深度学习模型中,需要高分辨率图像数据来进行目标识别,为了能够对更远距离的目标进行识别和监测,已有厂商推出800万像素以上的车载摄像头。比如索尼半导体在2023年发布了1700万像素的车规图像传感器IMX735;舜宇光学也宣布完成了17MP前视车载镜头的研发。目前,一颗800万像素摄像头每秒钟产生的数据量高达5.76Gbps,未来要实现更高清摄像头的数据传输,对带宽的要求需达到10Gbps及以上。
高分辨率显示屏端:智能座舱域与车载显示屏之间的信息交互对带宽的需求也越来越高。以吉利银河E8为例,其搭载的45寸8K贯穿一体屏带宽需求可达12.7Gbps。
车载SerDes芯片集成的方案必要性:在大模型时代,如果摄像头达到320度的全视角覆盖,所需的摄像头数量将翻倍增长。车载SerDes芯片都是成对使用,如果按照单颗摄像头配一对串行/解串器的方案,那么整车对于车载SerDes芯片的需求就会大量增加,由此增加的线缆和插件等相关连接件,不仅不利于汽车轻量化,更会增加汽车的制造成本,与汽车整体的发展趋势和主机厂降本的需求相悖。对于采用下一代Zonal架构和AI大模型的汽车,串行器和解串器的集成方案显得尤为重要,有助于简化电路设计、减少SerDes芯片用量及线束、连接器的使用。
车载SerDes的协议可主要分为私有协议和公有协议。目前,全球车载SerDes市场是以私有协议为主导,ADI的GMSL和TI的FPD-Link几乎垄断了全球车载SerDes市场份额。为打破行业垄断,国内涌现出了越来越多的车载SerDes芯片企业,比如仁芯科技、昆高新芯、裕太微等。
由于TI和ADI在车载低速SerDes产品(1.6Gbps~6Gbps)已经占据先发优势和绝对垄断的主导地位,因此,国内许多厂商则针对未来智能汽车高带宽的需求,规划了高速车载SerDes产品(10Gbps以上),以抢占高速车载SerDes产品量产的先发优势。
以仁芯科技为例,R-LinC是仁芯科技自研的单通道16Gbps车载高性能SerDes芯片,向下可兼容全速率16Gbps-1.6Gbps,采用私有协议,支持15米的长距离传输,采用22nm工艺打造,插损补偿能力达到30dB以上,并可实现实时自适应均衡。R-LinC主要用于车载摄像头等传感器到SoC的长距离实时传输,其单通道16Gbps的速率可满足当前超高分辨率摄像头(如17MP)对于图像数据传输的极致需求。
传感器端,在16Gbps高速传输加持下,1颗仁芯R-LinC加串芯片可同时接入两颗8MP像素高清摄像头,单根线束传输两路视频流,节省1颗芯片和1套线束及接插件,助力当下主流视觉传感器方案高效降本。
仁芯科技加串芯片二合一方案
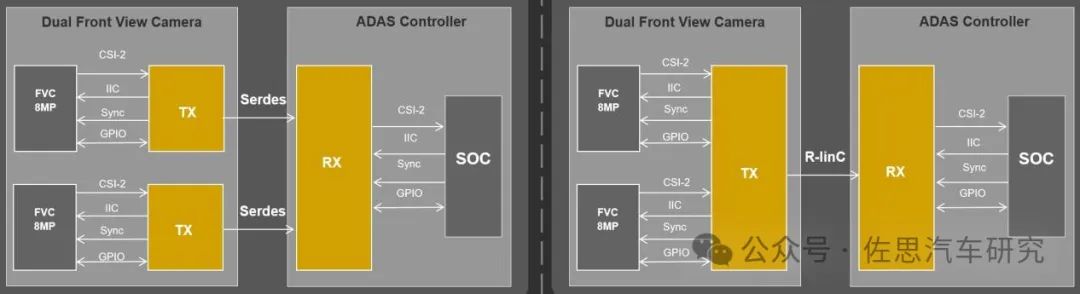
来源:仁芯科技
控制器侧,仁芯R-LinC单颗解串器可实现6路输入,最高可实现6*16Gbps (12颗8MP摄像头) 的高速数据吞吐能力,同时支持16Gbps的转发能力,因此,1-2颗解串器即可覆盖当前市场智驾主流视觉方案,配合6合1的新型连接器,使得板级硬件设计面积更小,器件布局更优,大幅降低了系统方案成本。
仁芯科技解串芯片六路合一方案
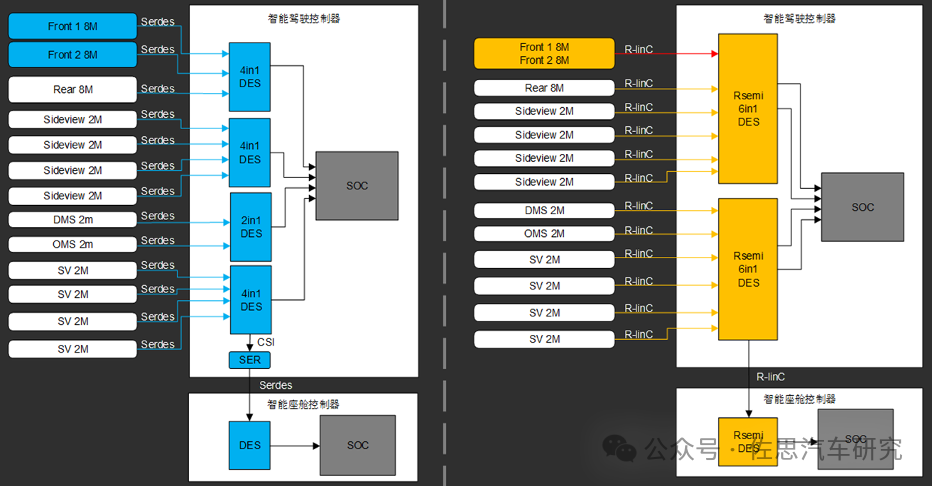
来源:仁芯科技
目前智能车型视觉传感器配置中,平均摄像头配置数量已超5颗,高阶智驾需要11颗摄像头才能完成对于整车周围环境的覆盖,为此,仁芯科技联合索尼半导体推出了“智驾5V超级视觉解决方案”。
仁芯科技&索尼半导体“智驾5V超级视觉解决方案”
硬件配置:该方案由1颗基于索尼17M图像传感器(IMX735)的前视超高清摄像头+4颗基于索尼8M像素的超级鱼眼摄像头+5颗仁芯16Gbps高速率加串芯片(RLC91603)+1颗高集成度6合1解串芯片(RLC99602)组成;
5颗摄像头完成整车智驾全视野覆盖:在该方案中,前视17MP摄像头能同时输出广角到窄角三幅图像,可替代现有主流2颗前视8MP像素摄像头;另外4颗8MP-12MP像素超大广角鱼眼摄像头,可以兼顾周视摄像头功能,完成对整车的全景覆盖。
R-LinC加/解串器在5V方案中的优势:
传感器方面,使用1颗仁芯R-LinC加串芯片就可满足索尼17MP超高清摄像头的传输速率,节省了1颗加串芯片和1套线束及接插件,实现成本的大幅降低;
控制器方面,该方案仅需1颗仁芯R-LinC解串器就能实现5路视频流输入,配合高集成度的新型连接器,有助于减小板级硬件设计面积、优化器件布局、降低系统方案成本。
车载SerDes的公有协议,目前有MIPI A-PHY、ASA-ML和HSMT三类公有标准。
三种车载SerDes公有协议
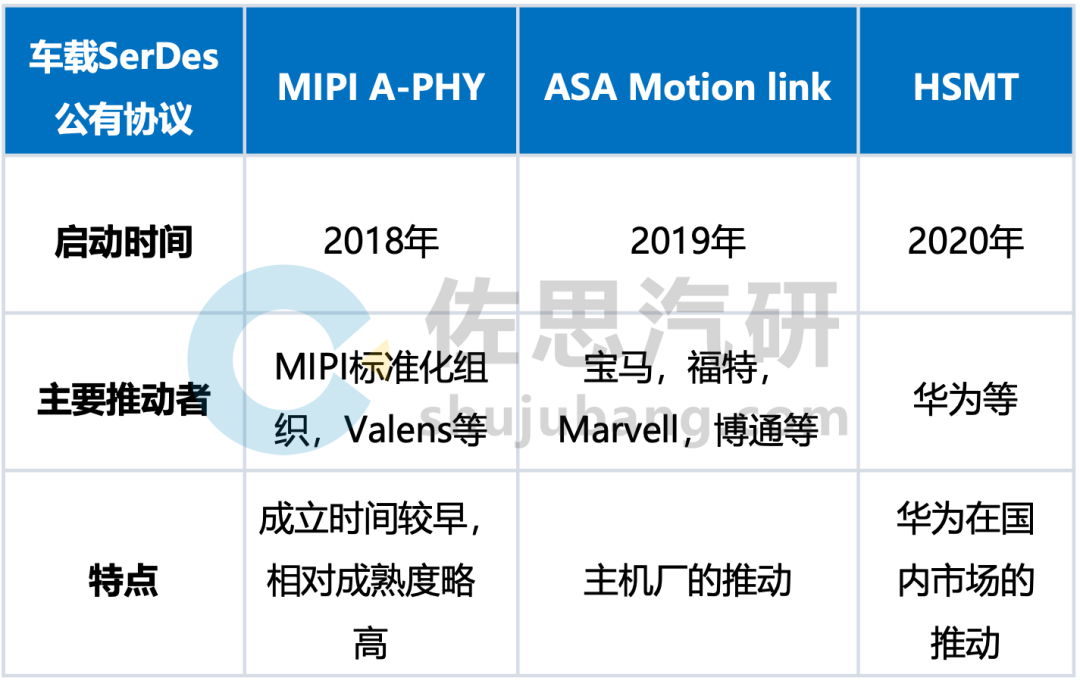
来源:佐思汽研《2024年下一代Zonal通信网络拓扑及芯片行业研究报告》
在MIPI A-PHY标准中,Valens是重要贡献者,也是市场上首家提供符合A-PHY标准的芯片组(VA7000系列)的厂商,目标是ADAS和自主驱动子系统中的超高速网络应用。在Valens A-PHY芯片的规划路线中,预计在2025年推出性能更强的VA7100芯片组,单个接口可支持16Gbps以上带宽,能够支持高达1700万像素以上的分辨率,并且可以同时接入摄像头和雷达的数据。在处理接受端,单链路可支持16Gbps以上带宽,可实现多路实时视频及数据的传输或交换,所有传感器数据均可灵活交换、复制。
Valens下一代基于MIPI A-PHY标准的VA7100芯片组
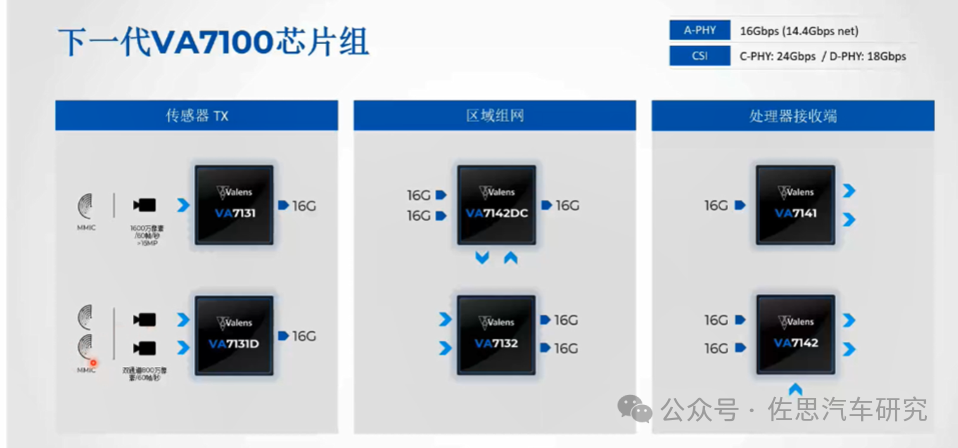
来源:Valens
ASA Motion link(ASA-ML)规范主要由宝马和Microchip推动。2024年3月,宝马集团在慕尼黑举行的汽车以太网大会上宣布,将于2027年引入标准化的ASA-ML。此外,宝马与Microchip还合作进行了一次基于ASA-ML标准的芯片组概念验证,未来宝马极有可能会采用Microchip的VS77X芯片组,传感器与域控和显示器之间的高速视频图像传输。
HSMT标准主要由华为等国内企业主推动。
不过,目前A-PHY、ASA-ML、HSMT等公有协议均未最后冻结,仍处于更新中,既没有通过产品规模出货的验证,更没有被行业广泛接受和普遍采用,还存在着很多不确定性。
由于SerDes是跨零部件的桥接芯片,在实际应用中都是成对使用,互联互通并非刚性需求,相对来说,私有协议更加高效简洁,成熟度高,因此关于SerDes标准化的发展路径仍有待观察。
Zonal架构下,如何构建下一代车载通信架构?
下一代Zonal架构中,实现功能集中化之后,车内ECU将大量减少。这种功能的集中化主要是靠软件算法来引导,但要真正落实下来,必须依赖区域控制器及中央计算平台内的控制器、SoC、通信芯片、电源芯片等物理硬件来支撑。
现阶段跨域融合+Zonal架构对车内骨干网络的通信需求
小鹏汽车X-EEA3.0:中央超算C-DCU,集成座舱、部分车身、中央网关等功能。在这个中央超算的通信中,C-DCU内含1个车载以太网交换机并支持TSN,通过2路千兆以太网1000Base-T1与XPU和5G智能天线连接;6路百兆以太网,其中2路连接左右Zonal控制器(LDCU、RDCU)。中央计算平台和两个区域控制器的MCU均采用瑞萨第三代28nm高速MCU。
小鹏汽车中央超算C-DCU通信拓扑
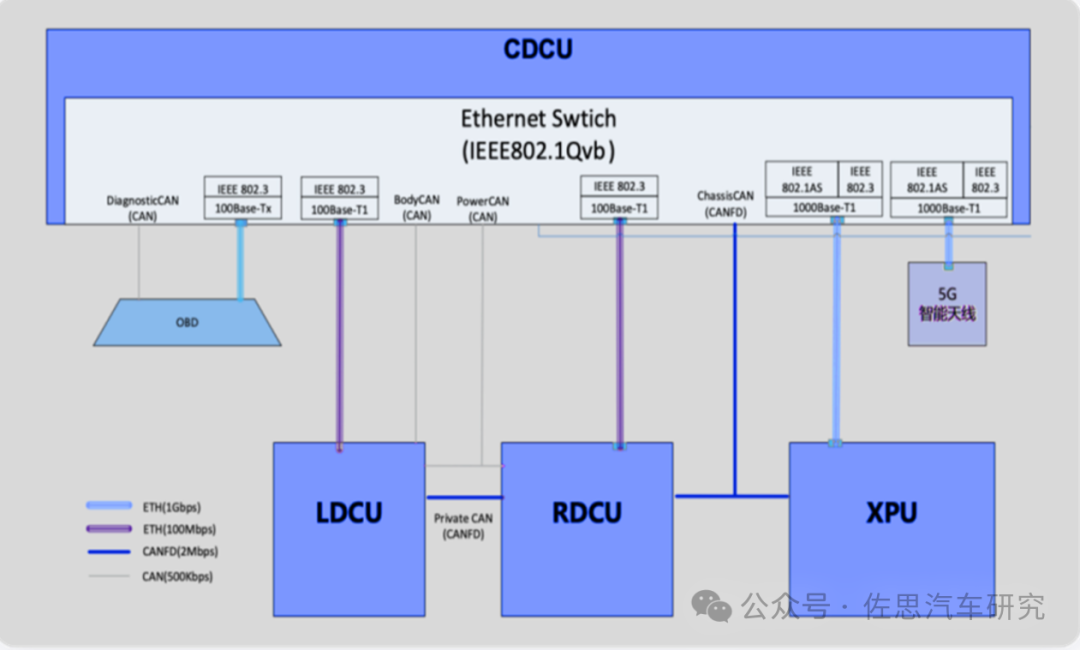
来源:小鹏汽车
长安汽车SDV环网:长安汽车SDA架构由C2(中央计算机:算力508TOPS)+EDC(体验计算机:算力2000GFLOPS)+三个区域控制器VIU组成。该架构采用车载以太网环网通信技术,以百兆以太网为主干网,C2和EDC之间通过千兆以太网通信,同时应用了TSN、环网冗余等技术,解决传统以太网数据传输乱序、丢包等问题。
长安汽车SDV环网
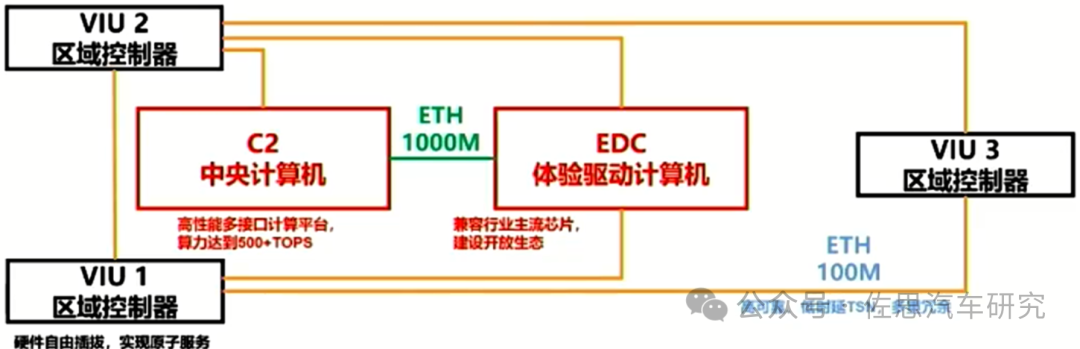
来源:长安汽车
下一代中央计算+Zonal架构对车内骨干网络的通信需求
下一代中央计算+Zonal架构中,区域控制器内一般会集成Zonal网关、高速通信MCU、车载以太网交换芯片、以太网PHY芯片等与通信相关的芯片器件。每个Zonal网关内都包含一个以太网交换机,一辆车可能需要6-7片。
典型的Zonal网关设计
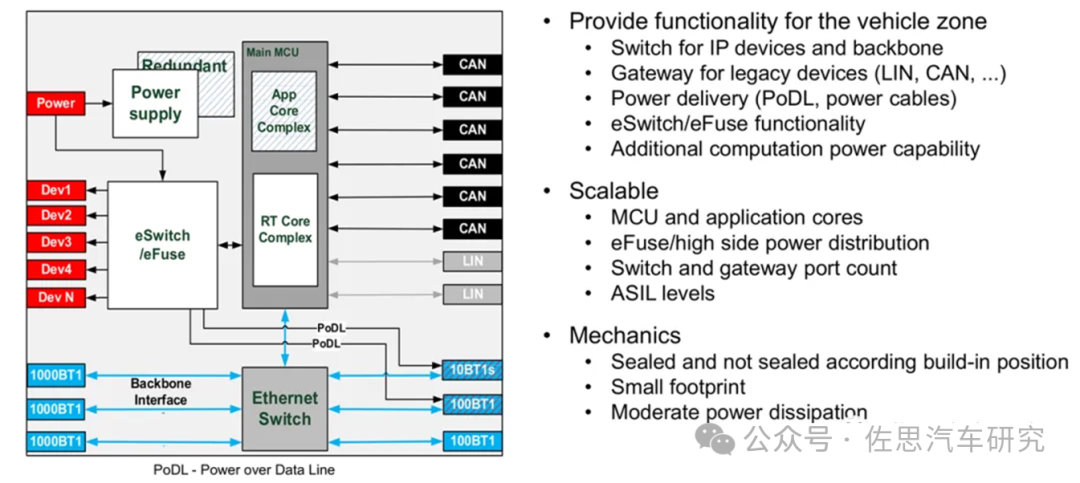
来源:Visteon
Zonal架构下一些典型解决方案:
高速通信MCU(NXP):2024年3月,NXP推出了全球首款5纳米汽车MCU——S32N55。S32N55集成了车辆动态控制、车身、舒适、中央网关,具备多种网络接口,包括CAN、LIN、FlexRay、车载以太网、CAN-FD、CAN-XL以及PCIe,CAN网络接口至少有15个。
NXP S32N55内部框图
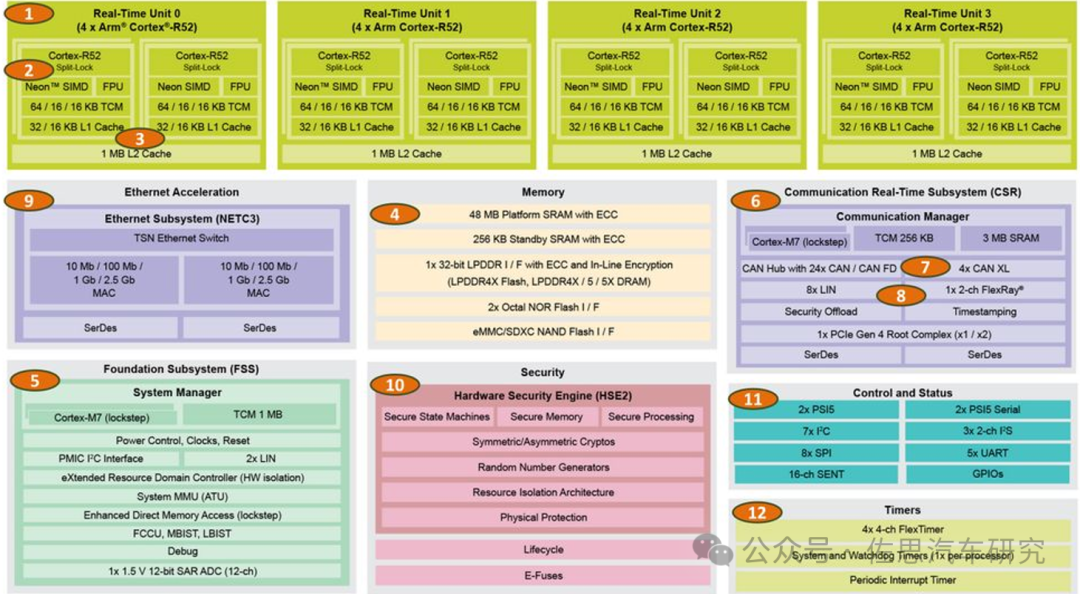
来源:NXP
车载以太网PHY芯片(裕太微):2023年年底,裕太微的首款千兆车载以太网PHY芯片产品YT8011成功量产,并拿到多家OEM定点。YT8011系列芯片兼容百兆100BASE-T1和千兆1000BASE-T1,支持RGMII/SGMII MAC 接口,支持EEE节能以太网、1588时间同步协议、IEEE802.1AS时间同步协议,可在非屏蔽双绞线上达到60米以上的传输距离,充分满足雷达、环视、自动驾驶等高速数据传输的应用需求。
裕太微千兆车载以太网PHY芯片YT8011应用框
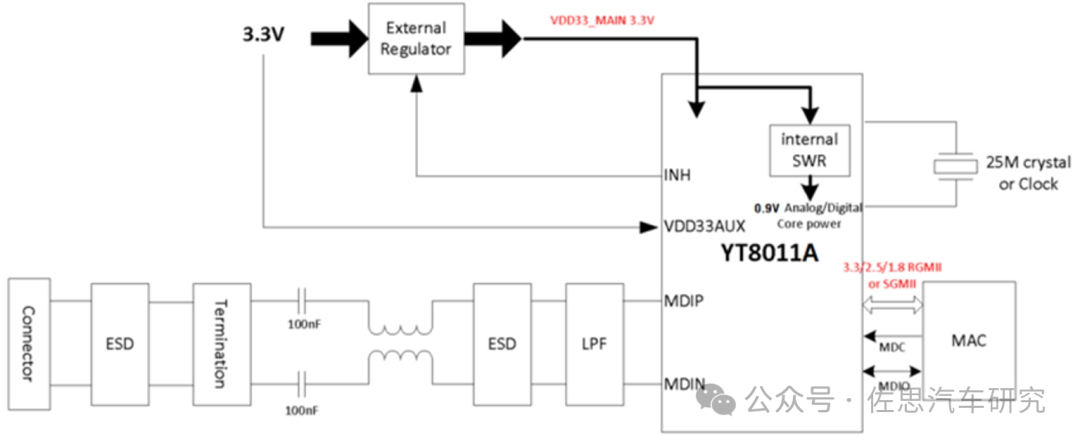
来源:裕太微
车载以太网交换芯片(Marvell):Marvell的中央汽车以太网交换机系列Brightlane Q622x包含了Q6222和Q6223两款产品,是专门为汽车Zonal架构而设计。其中,Q6223带宽达90 Gbps,几乎是当前可用汽车交换机容量的2倍;Q6222包含9个60 Gbps端口,其中有五个10G SerDes端口、四个2.5G SerDes端口和两个1000Base-T1 PHY可供选择。该区域交换机将来自汽车物理区域内的设备的流量聚合到一起,通过高速以太网连接至中央计算交换机实现信息交互。
Marvell 中央汽车以太网交换机Q6222框图
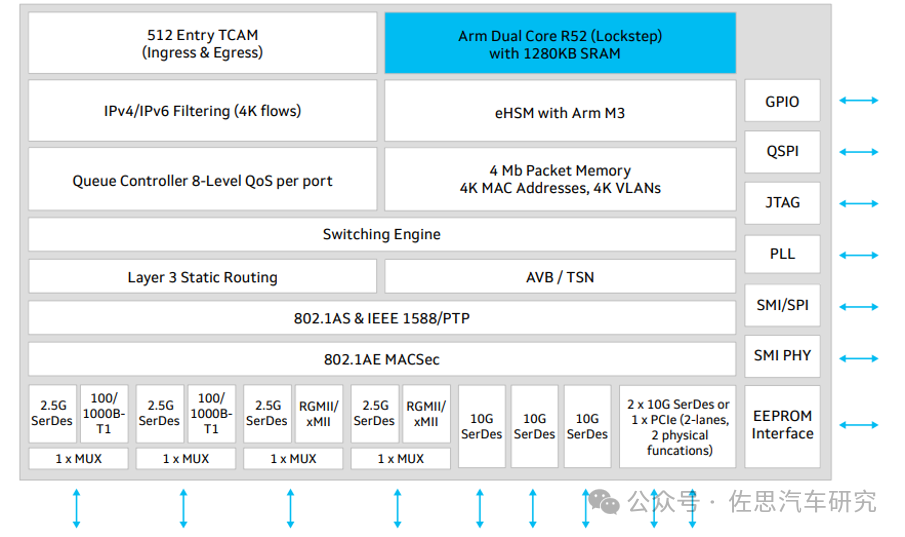
来源:Marvell
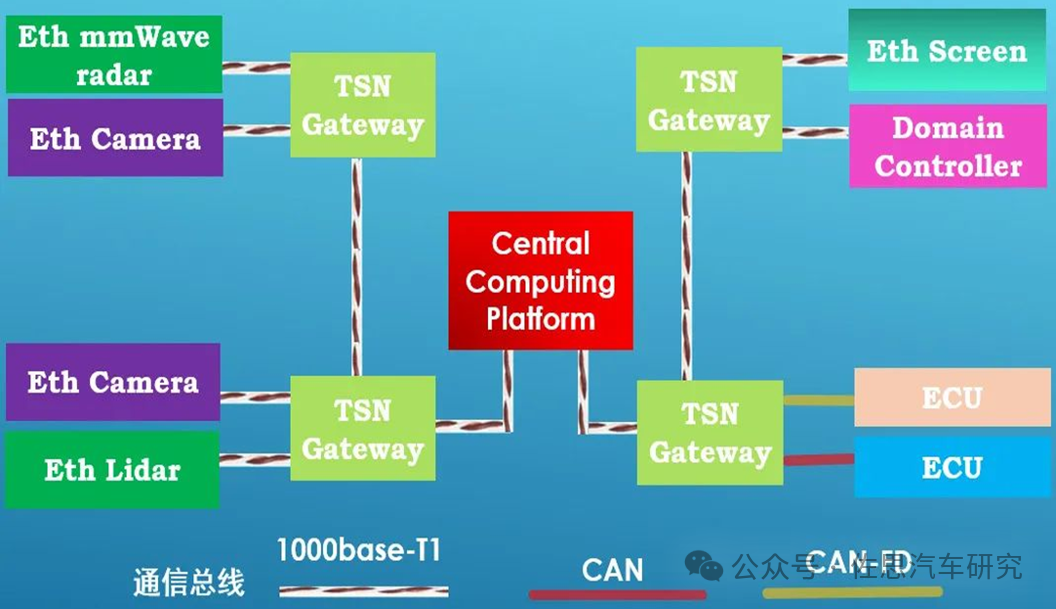
赫千科技基于车载以太网为骨干网络设计的区域网关架构:传感器采集数据后通过车载以太网传输至对应的TSN区域网关进行数据交换,然后区域网关将对应的数据再通过车载以太网总线传输至中央计算平台进行运算处理;中央计算平台对数据进行运算处理后通过TSN网关传输至域控制器进行决策或车载以太网显示屏(Eth Screen)进行显示;同时TSN区域网关兼容CAN/CAN-FD通信,通过CAN总线、CAN-FD总线与相应CAN ECU进行信息交换。
基于车载以太网为骨干的区域网关架构
来源:赫千科技
未来,考虑到自动驾驶对数据传输的需求,以及为满足车内功能安全的要求、中央与区域控制器之间大量的数据传输迁移以及软件算法的交互,10G+车载以太网可能会成为Zonal架构中的数据主干链路。
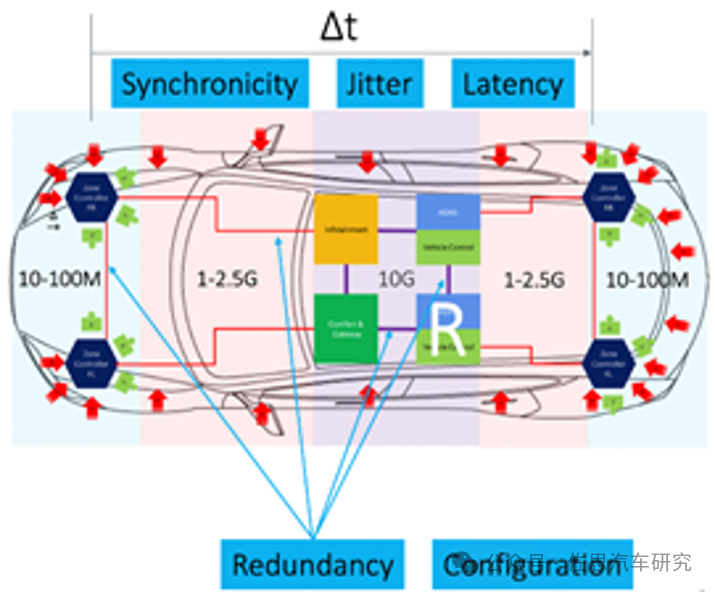
来源:北汇信息
片间互连成为HPC中央计算平台通信关键
Zonal架构的核心部分是中央计算平台,由于智能驾驶、智能座舱、车控等所有需要一定规模计算资源的系统都将集中在一个中央计算单元内,会用到多个处理器或是SoC,这对中央计算平台硬件架构的算力、接口、数据安全、功能安全等诸多方面提出了很高的要求。中央计算平台是CPU+GPU的异构芯片集成化设计,板间互连、片间互连、片上互连等通信技术是关键。因此,Zonal架构下,汽车网络还面临一个重要挑战,那就是中央计算平台本身的高性能计算互联。
在异构计算架构中,GPU与CPU一般通过PCIe总线连接在一起来协同工作。目前,市场上车规级PCIe交换机厂商主要有两家,一家是Microchip,偏向中高端产品;另一家是瑞萨收购的PERICOM,偏向低端市场,不支持NTB。
Zonal架构中,HPC内部将使用PCIe总线连接
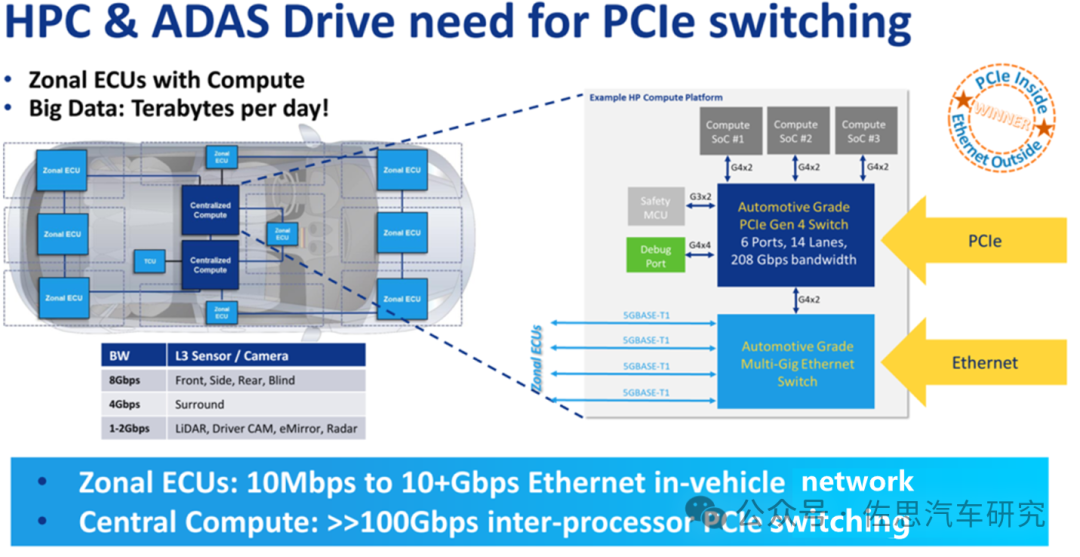
来源:Microchip
在大模型训练过程中,高端显卡集群的全部潜力取决于GPU服务器集群中每个GPU之间能否快速、顺畅地通信。在多GPU系统内部,GPU间通信的带宽通常在数百GB/s以上,PCIe总线的数据传输速率容易成为瓶颈,且PCIe链路接口的串并转换会产生较大延时,影响GPU并行计算的效率和性能。
因此,NVIDIA推出了能够提升GPU之间通信的NVLink技术。NVLink用于SoC,车载计算平台NVIDIA DRIVE Thor将数字仪表板、车载信息娱乐、自动驾驶、泊车等诸多智能功能统一整合到单个架构中。2024年3月,NVIDIA推出了第五代NVLink,总带宽可达 1.8 TB/s,是PCIe 5.0 带宽的14 倍之多,单颗NVLink Switch芯片有500亿颗晶体管,支持多达576个GPU间的无缝高速通信,适用于复杂大语言模型。
NVIDIA Blackwell架构基于第五代NVLink技术,专为Transformer、大语言模型(LLM)和生成式AI工作负载而打造,可分为B200和GB200产品系列。其中GB200 GPU集成了1个Grace CPU和2个B200 GPU,相较于NVLink 4的H100 Tensor Core GPU,GB200 NVL72可以为大语言模型(LLM)推理负载提供 30 倍的性能提升,并将在数万亿参数上构建和运行实时生成式 AI 大型语言模型的成本和能耗降低到此前的 25 分之一。
2024年3月,英伟达宣布与比亚迪扩大合作,未来的比亚迪电动汽车将搭载英伟达采用Blackwell架构新一代自动驾驶汽车处理器DRIVE Thor,DRIVE Thor预计最早于2025年开始量产,性能高达1000TFLOPS。此外,比亚迪还将使用英伟达 AI 基础设施进行自动驾驶模型训练,智能工厂机器人也将使用NVIDIA Isaac 机器人系统。
-
risc-v芯片在电机领域的应用展望2024-12-28 892
-
射频识别芯片在汽车智能防盗报警装置中的应用是什么2021-05-13 2029
-
求大佬分享汽车领域中MEMS传感器的应用知识点2021-06-15 1981
-
芯片在汽车上的应用2021-07-16 1491
-
芯片在汽车上的8大主要应用2021-12-07 4076
-
龙芯在未来将以MCU芯片进军汽车领域2023-04-19 1072
-
国内首个汽车芯片在线供需对接平台正式推出2022-03-04 3591
-
MCU芯片在电子领域中的应用盘点2023-06-01 1776
-
汽车芯片市场集中度最高的领域:SerDes介绍2024-01-22 7547
-
DRP芯片在多个领域的应用2024-04-13 2261
-
解读MIPI A-PHY与车载Serdes芯片技术与测试2024-07-24 6351
-
汽车SerDes ESD保护2024-09-24 575
-
艾毕胜电子MS39549 电机驱动芯片在智能门锁领域中的应用2024-10-08 1601
-
SOC芯片在汽车电子中的应用2024-10-31 3781
-
什么是SerDes?SerDes有哪些应用?2025-03-27 7941
全部0条评论

快来发表一下你的评论吧 !
