

超声波测距系统设计理论分析及工作原理
工业控制
描述
在双探头近距离的超声波测距系统中,存在着测量精度不高的问题,并且距离越近误差越大,在测量距离小于10cm时,由于探头之间的相互影响,将导致无法测量该段距离。本系统根据超声波传播过程中的叠加原理,通过分析探头之间干扰波与从被测物反射的回波的相互叠加,从而消除在近距离测量时的测距盲区。在发射和接收探头之间距离不同时,分析其对测量误差的影响,选择最理想的探头放置距离,并且结合温度对声速传播的影响,设计出近距离高精度无盲区超声波测距系统。
超声波测距由于具有非接触式测量、不受电磁干扰、结构简单、成本低等许多优点,在测距方面得到越来越广泛的应用。以往的测距方法通常包括以下两种:
(1)用微分电路监测回波信号的极值电压,该点的斜率为0,并记下从加载激励信号到该时刻的时间,从而得到被测物的距离;
(2)用固定幅值门限的比较电路,当回波信号的电压达到所设的固定幅值时产生中断记下该时刻,从而计算出到被测物的距离。这两种检测方法的共同缺点是:无法在近距离范围内测量,因为所监测的特征在测量盲区内都会出现,从而导致测量结果错误。所以对应的一般办法是舍弃近距离的测量,屏蔽盲区的信号检测,从而限制该类型超声探头在近距离测量方面的应用,而选用更精密昂贵的超声波探头应用在近距离测距的场合。
在收发换能器分立的超声波测距系统中,由于发射探头和接收探头的距离较近,发射探头产生的声波信号在探头壁上产生反射和折射现象,从而使接收探头接收到杂乱的回波信号,且当被测物与超声波探头相距较近时,所收到的回波信号是从障碍物反射所得还是从发射探头得到将很难分辨,故限制了其在近距离测量方面的应用,因此提高近距离超声波测距系统的测量精度具有重大的研究意义。
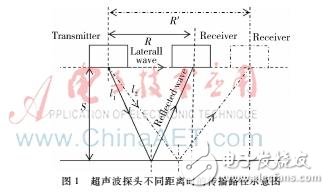
本文提出了一种近距离高精度无盲区超声波测距的方法,如图1所示。当被测物与超声波探头相距较近时,超声波探头之间产生的干扰波和从被测物反射的回波将会进行叠加作用在接收探头上。探头之间距离(R)越小,接收到干扰信号的幅值越大,距离越大,幅值将越小。根据声波信号的叠加原理,采集接收到回波信号的幅值,通过分析回波信号的幅值信号,得出从被测物反射回波的到达时刻,从而实现近距离的测量。同时,两探头之间的距离将会影响分析回波信号的分辨能力,所以对两探头之间的距离找一个平衡是提高超声波在近距离测距精度的关键。
1理论分析
在超声波测距系统中发射探头发射的能量由所加激励信号的能量和探头本身的物理属性决定,考虑探头在半无限大空间中的发射声场时,由于波源各点至轴线上某点的距离不同,存在声程差,互相叠加时存在相位差而导致相互干涉,使得一些地方声压相互加强,一些地方相互减弱,因此在声束轴线上出现极大值和极小值,如式(1)所示。这一系列存在极大和极小值的区域即为近场区[5]。
式中,P为轴线上距离声源a处声压,P0为波型转换次数,RS为圆盘源半径,ω为角频率,t为点源辐射至距离a处的时间,k=2π/λ。声压P随t做周期变化,在超声波测距过程中只考虑振幅P1:

声场的指向性,即声束集中向一个方向辐射的性质,声束在该点的集中程度反映了该点声场强度的大小,即可大致地表示该点的声场强度,指向系数Dc按式(4)定义,在晶片尺寸一定时,可以通过式(5)计算该探头的扩散角度,从而计算出不同角度点处的声场强度。
当已知被测物与超声波换能器连接线的中轴线之间夹角θ的大小时,接收换能器能够接收到的比例系数,角度越小,接收的能量越大[6]。
通过对以上公式的分析可以得出,在相对探头不同的距离其他实验条件相同的条件下,声波在空气中的传播速度一定,对应相同的被测物体时,超声波探头接收回波的声强将与被测物的相对距离成反比。当被测物在测试系统的盲区范围内时,通过采集回波信号波峰出现的时刻与无被测物在前时的情况进行对比,通过实时地跟踪回波信号的幅度来判断出被测物所出现的时刻,进而计算出被测物所处的位置。
为了能够更精确地测量出从被测物反射的回波信号达到的时刻,希望所监测回波信号幅值变化越大越好,以提高信号的区分度。因为发射探头和接收探头距离越近幅值越大,此时干扰信号产生的幅值信号起主要作用,而从被测物反射的回波信号产生的幅值信号叠加之后会很弱,影响区分度,不宜监测;当发射探头和接收探头放置过远时,虽然干扰信号引起的幅值变化会很小,从被测物反射的回波信号产生的幅值信号起主要作用,辨识度提高,但是根据图1,探头相对距离越远误差越大,所以在其中寻找一个合适的探头相对距离将有利于提高系统的测量精度。
因在不同的环境温度下声波的传播速度是不一样的,它们之间的关系如式(6)所示,为了减少环境温度对测量精度的影响,系统中需加入温度矫正模块,通过实时地测量当前环境下的温度,更新计算中声音的传播速度,提高测量精度。
c=331.4×1+T/273(6)
2系统组成
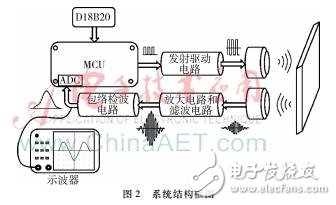
为验证理论分析的正确性,测量系统使用T/R4016超声波探头制作了超声波近距离测距系统,如图2所示,T/R4016超声波探头为廉价型超声波测距探头,扩散角为60°,广泛地用在5m以内的测距领域,其改进型的防水探头被广泛地应用在汽车的倒车雷达系统中。在本系统中为实现距离的精确测量,需要使用处理速度较快的微控制器,至少需达到微秒级别才能满足AD的采集并对回波信号进行处理,本系统中选用的是NXPKL25微控制作为控制核心,该处理芯片为基于Cortex-M0+内核的微控制器,内核运行频率达48MHz,满足系统的处理需求。
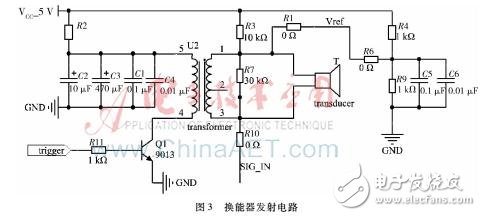
根据该型号探头的频率特性,其谐振频率为40kHz,所以选择加载在发射端激励信号为40kHz的方波信号,且发射的激励信号以8个周期脉冲为一组。原理图如图3所示。将trigger引脚连接到KL25的控制引脚,控制激励信号的输入。
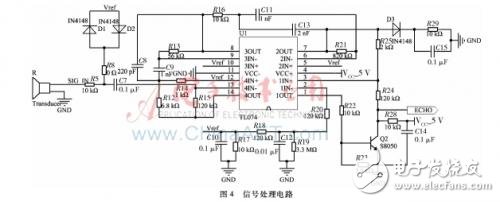
因接收器接收到的回波产生的电信号非常微弱,必须进行信号放大,同时为了避免其他杂波的干扰,在电路中加了通频为40kHz的带通滤波器,滤除40kHz左右以外的干扰信号,处理电路如图4所示。因为加载的激励信号为40kHz的方波信号,所以通过放大后的回波信号也是40kHz的调幅波信号,为满足数模转换器(ADC)检测的连续性,对带通滤波后的信号进行包络检波及平滑处理。系统中加入包络检波的另一个好处是滤除回波信号的负半轴,虽然干扰信号与回波信号进行波形叠加时会出现部分减弱的情况,但是包络检波器会对叠加后的波形进行平滑处理,得到的回波信号都在正半轴,所以包络检波后的信号都是加强后的信号。
系统控制发送激励信号后,控制器同时打开定时器和ADC模块,ADC一直采集经过包络检波后的回波信号,并且实时地分析所采集的信号,判断回波信号的最大值是否出现,若出现再判断是否为从被测物反射的回波信号,若是则关闭定时器,定时器里的计数值换算为时间即为声波从发射到返回所经历的时间。随后微控制器读取DS18B20的值,获得当前环境的温度,通过式(6)算出当前声波的传播速度,通过测得的传播时间和传播速度,计算得出超声波探头与被测物之间的距离。
- 相关推荐
- 热点推荐
- 超声波测距系统
-
超声波测距系统设计2008-10-15 8552
-
超声波测距原理2012-04-25 13117
-
超声波测距系统毕设2016-04-18 6320
-
多点超声波测距报警系统2020-02-26 2837
-
什么是超声波电源?超声波电源是什么工作原理?2021-03-16 7200
-
HC-SR04超声波模块的工作原理是什么2021-07-19 2244
-
超声波测距程序的基本工作原理2021-08-04 1777
-
HC-SR04超声波测距模块的基本工作原理2021-12-01 1436
-
超声波传感器模块的工作原理是什么2022-01-06 1921
-
超声波模块的工作原理与时序图学习2022-02-16 1113
-
超声波测距实验2009-03-07 7728
-
超声波测距原理及简介2011-11-07 11464
-
超声波测距2015-11-18 1185
-
超声波测距仪说明文件2016-03-14 980
-
超声波测距液位传感器的工作原理是怎样的2020-11-04 3525
全部0条评论

快来发表一下你的评论吧 !
