

惯性传感器解决移动机器人自主导航
机器人
描述
Adept MobileRobots项目经理Seth Allen认为,地面机器人系统必须常常处理"枯燥、肮脏、危险"的工作。换言之,机器人系统通常用于人工介入成本过高、危险过大或者效率过低的任务。在许多情况下,机器人平台的自主工作能力是一项极为重要的特性,即通过导航系统来监视并控制机器人从一个位置移到下一位置的运动。管理位置和运动时的精度是实现高效自主工作的关键因素,MEMS(微机电系统)陀螺仪可提供反馈检测机制, 对优化导航系统性能非常有用。
图1中所示的Seekur机器人系统就是一个采用先进MEMS器件来改善导航性能的自主系统。
图1. Adept MobileRobots公司的Seekur系统。
机器人导航概述
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。(例如,对于医院里的标本递送机器人,递送时间非常关键。)行程计划被馈入控制器,后者生成传动和方向配置文件以便进行导航控制。这些配置文件可根据行程计划执行动作和进程。该运动通常由若干检测系统进行监控,各检测系统均产生反馈信号;反馈控制器将信号组合并转换成更新后的行程计划和条件。图2是一般导航系统的基本框图。
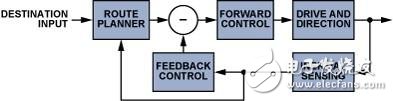
图2. 一般导航系统框图。
开发导航系统的关键步骤始于充分了解每种功能,尤其需要重视其工作目标和限制。各项功能通常都有一些明确界定且易于执行的因素,但也会提出一些需要加以处理的具有挑战性的限制。某些情况下,这可能是一个反复试探的过程,即识别和处理限制的同时又会带来新的优化机遇。通过一个实例可以清楚说明这一过程。
Adept MobileRobots Seekur机器人
Adept MobileRobots Seekur2是一款采用惯性导航系统 (INS)的自主机器人,参见图3。该车辆具有4轮传动系统,每个车轮均有独立转向和速度控制能力,可在任何水平方向上灵活地移动平台。此能力对于仓库交货系统、医院标本/补给品递送系统和军队增援系统等新兴应用中的机器人车辆非常有用。
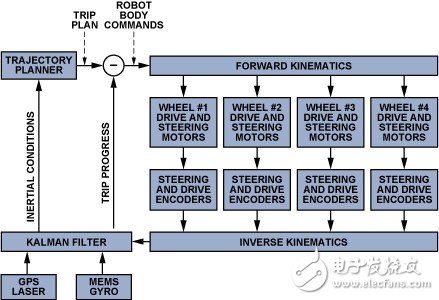
图3. Adept MobileRobots Seekur导航系统。
正向控制
机器人本体命令,即主要误差信号, 代表轨迹规划器提供的行程计划与反馈检测系统提供的行程进度更新信息之间的差异。这些信号被馈入逆向运动学系统,后者将机器人本体命令转换成每个车轮的转向和速度配置文件。这些配置文件使用阿克曼转向关系,进行计算,整合了轮胎直径、表面接触面积、间距和其他重要几何特性。利用阿克曼转向原理和关系,上述机器人平台可创建以电子方式链接的转向角度配置文件,类似于许多汽车转向系统中使用的机械齿轮-齿条系统。由于这些关系是以远程方式整合在一起的,不需要以机械方式链接车轴,因而有助于最大程度减小磨擦和轮胎滑移,减少轮胎磨损和能量损耗,实现简单的机械链接无法完成的运动。
车轮驱动和转向系统
每个车轮均有一个驱动轴,通过变速箱以机械方式连接至驱动马达,同时通过另一个变速箱耦合至光学编码器,即测程反馈系统的输入端。转向轴 将车轴耦合至另一伺服马达,该马达负责确立车轮的转向角度。转向轴还将通过变速箱耦合至第二个光学编码器,也即测程反馈系统的另一个输入端。
-
惯性测量单元传感器在自主移动机器人的应用2025-02-27 1773
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 1944
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2892
-
如何实现移动机器人的设计?2020-11-23 3183
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3668
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 2045
-
基于MSP430F149单片机设计的室外移动机器人组合导航定位系统2019-07-11 2853
-
基于超声波传感器的自主移动机器人探测系统2018-11-02 2974
-
移动机器人避障常用传感器及神经网络算法2018-05-15 13894
-
移动机器人自主导航2018-01-17 991
-
Labview My RIO 移动机器人2016-08-21 13283
-
移动机器人的避障技术与常用传感器2016-06-15 6715
-
移动机器人常用传感器2012-08-20 6502
-
基于超声波传感器的自主移动机器人的探测系统2012-01-19 8413
全部0条评论

快来发表一下你的评论吧 !
