

【CAN总线知识】深度解析CAN-FD与CAN协议的差别
描述
导读
随着工业的发展,工业总线上的数据量越来越多,这使得CAN总线的逐渐达到负荷极限,这就需要改进原有的总线来提高总线传输速率,CAN-FD便在这样的背景下诞生了。
随着当今工业的发展,尤其是在CAN总线运用较多的汽车领域,总线通讯的数据量越来越大,例如电动汽车上,汽车内部出现更多的辅助系统和人机交互系统,这就使得传统的CAN总线在传输速率和带宽方面越来越力不从心。因此CAN-FD孕育而生。
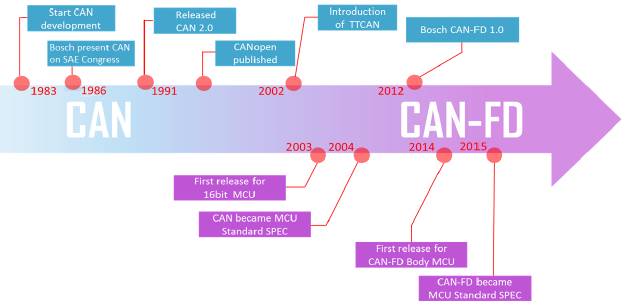
图1
根据CAN规范ISO11898-2所定义的标准帧结构,一帧报文最大只能传输64位(8个字节)的数据,在最好的情况下总线负载达到70%左右,不过如果报文数据少于8个字节的情况下总线负载可能会更小。我们或者会提出疑问,为什么不可以把CAN标准的通信波特率改高一点呢?其实是有一个很重要的因素,CAN采用仲裁机制来判定不同节点CAN报文传输的优先级,在仲裁期同一总线上的所有节点必须在一个位的时间内到达。另一方面电信号有一个有限的传播速度。从大量经验中得出CAN总线以1Mbit/s运行的最长距离为40米。通信波特率越高,通信距离则越短。
 CAN-FD与CAN主要区别
CAN-FD与CAN主要区别
CAN-FD和CAN主要的区别有两点:
1. 可变速率
CAN-FD采用了两种位速率:从控制场中的BRS位到ACK场之前(含CRC分界符)为可变速率,其余部分为原CAN总线用的速率。两种速率各有一套位时间定义寄存器,它们除了采用不同的位时间单位TQ外,位时间各段的分配比例也可不同。
2. 新的数据场长度
CAN-FD对数据场的长度作了很大的扩充,DLC最大支持64个字节,在DLC小于等于8时与原CAN总线是一样的,大于8时有一个非线性的增长,所以最大的数据场长度可达64字节。
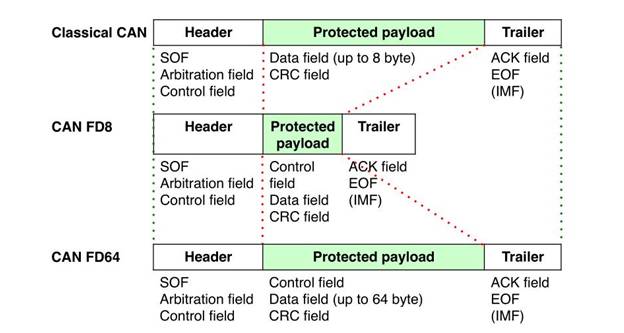
图2
 CAN-FD简介
CAN-FD简介
1. CAN-FD 数据帧帧格式
CAN-FD 数据帧在控制场新添加EDL位、BRS位、ESI位,采用了新的DLC编码方式、新的CRC算法(CRC场扩展到21位)。CAN-FD数据帧格式如图 3所示。
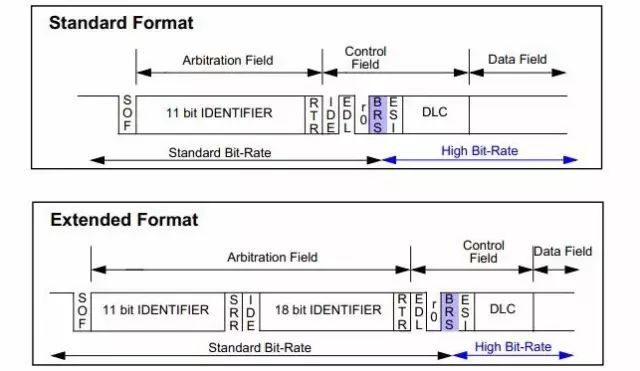
图3
2. 新添加位介绍
2.1 EDL位(Extended Data Length),原CAN数据帧中的保留位r, 该位功能为:
- 隐性: 表示CAN-FD 报文 (采用新的DLC编码和CRC算法);
- 显性: 表示CAN报文。
2.2 BRS位( Bit Rate Switch),该位功能为:
隐性:表示转换可变速率;
显性:表示不转换速率。
2.3 ESI(Error State Indicator),该位的功能为:
隐性:表示发送节点处于被动错误状态(Error Passive);
显性:表示发送节点处于主动错误状态(Error Active)。
EDL位可以表示CAN报文还是CAN-FD报文;BRS表示位速率转换,该位为隐性位时,从BRS位到CRC界定符使用转换速率传输,其他位场使用标准位速率,该位为显性时,以正常的CAN-FD总线速率传输;通过添加ESI位,可以很方便的知道当前发送节点所处的状态。
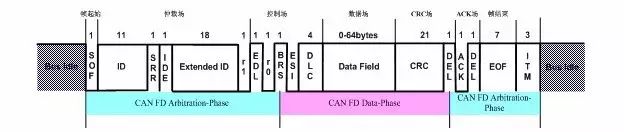
图43. 新的CRC算法CAN总线由于位填充规则对CRC的干扰,造成错帧漏检率未达到设计意图。CAN-FD对CRC算法作了改变,即CRC以含填充位的位流进行计算。在校验和部分为避免再有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码,作为格式检查,如果填充位不是上一位的反码,就作出错处理。CAN-FD的CRC场扩展到了21位。由于数据场长度有很大变化区间,所以要根据DLC大小应用不同的CRC生成多项式,CRC_17,适合于帧长小于210位的帧,CRC_21,适适合于帧长小于1023位的帧。
4. 新的DLC编码
CAN-FD 数据帧采用了新的新的DLC编码方式,在数据场长度在0-8个字节时,采用线性规则,数据场长度为12-64个字节时,使用非线性编码。如图 5所示。
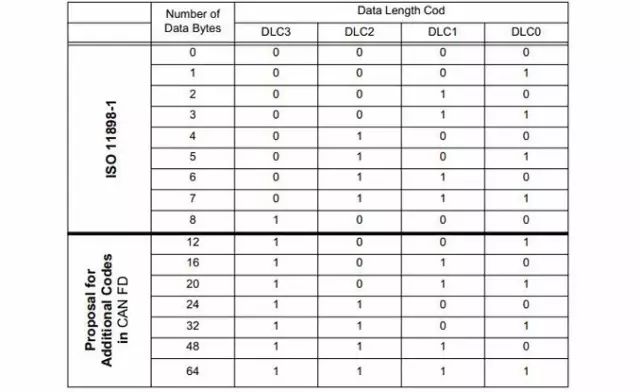
图5
CANFD接口卡 USBCANFD-400U
• 4路CANFD 2路LIN
• XCP/CCP标定
• 兼容CAN2.0A/B模式收发
参考价格:3300元起
-
浅谈CAN FD总线协议帧格式2022-10-14 4918
-
应用指南—如何使用DSLogic分析CAN/CAN-FD信号?2023-09-04 4363
-
CAN/CAN FD/CAN XL三大总线协议解读,是逐步替代关系吗?2024-08-12 7909
-
如何从传统的CAN用法中设置CAN-FD?2025-04-14 3446
-
CAN-FD协议你了解多少2021-08-19 2224
-
CAN FD协议介绍2021-08-20 2465
-
一文浅析汽车CAN-FD总线的通信应用2023-02-14 1456
-
你知道CAN-FD协议有多少?2018-07-09 11859
-
CAN总线协议是什么?CAN总线协议有哪些?CAN总线协议知识分析2018-10-03 76627
-
CAN-FD协议你了解多少 ?2020-03-08 18317
-
DS70000系列数字示波器在CAN-FD协议解码上的应用2022-03-25 3866
-
STM32设备上的CAN FD2022-08-28 1184
-
简单介绍基于CAN-FD的诊断通信传输层2022-11-10 3697
-
CAN与CAN-FD主要区别概述2022-11-21 55129
-
如何使用DSLogic分析CAN/CAN-FD 信号?2024-01-08 3471
全部0条评论

快来发表一下你的评论吧 !
