

UC3846在永磁无刷电机驱动中的应用
伺服与控制
描述
1、前言
直流电机的电磁转矩是电枢电流的函数,电流受到转速,负载转矩等多种因素的影响,是一个复杂的转换过程。因之,对直流无刷电机控制的关键环节在于电流环的控制,即电流闭环控制和电流变化率控制。不但要满足精度的要求,还要满足速度的要求。特别是电流变化率的控制,要求响应速度非常快才行。
2、控制系统的设计
在一些特殊的应用环境中,如电梯、起重、曳引等,要求驱动、拖动系统的起步、停止及运行过程非常平稳,以增强舒适感和安全性。图1是一个典型的闭环控制系统,图中Vgn是中心控制单片机给定转速,Vfn是反馈转速,两者之间的差值经速度调节器产生给定电流信号Vgi,该闭环称为速度调节环。Vgi和霍尔电流传感器HL检测出的电流Vfi求差后进入电流调节器LT,该调节器是在最大电流限制下进行调节的,输出的波形控制信号Vgb在电流变化率控制电路LBT的控制下产生驱动IGBT的PWM脉冲。电流变化率信号是将来自HL的电流信号经微分电路LD微分后产生的,在LBT中对Vgb进行调整,限制电流变化率的增长。在图l所示的控制系统中,虚线框内部分利用UC3846进行了设计。下面介绍一下设计原理。
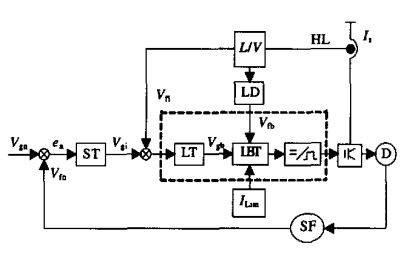
图1 闭环控制框图
2.1、电流型控制器原理
电流型控制器除了要有电压型PWM控制器的全部功能外,还需要有电流检测环节,检测点可以根据需要任意选择,例如开关管电流、电感电流或由HL传感器送来的总输出电流等。下面以UC3846为例说明其工作原理。图2示出了该芯片的内部结构。图中不同于电压型控制器件之处是设置了一个电流测定放大器,增益为3。E/A放大器为误差放大器,输出经过二极管和0.5v偏压后送至比较器反向端,同相端为三倍后的电流测定信号。电流测定放大器输出由内电路限定在3.5V以下,因之,电流测定信号最大电压值被限定在3.5/3=1.2V之内。根据1.2V可选择电流测定环节参数。对于电流型控制,为了保证输出电流恒定,不受占空比d的影响,就必须进行斜坡补偿。其方法是:在电流检测放大器输入端(4脚)或误差放大器输出端(7脚)叠加一个从振荡器波形派生的三角波形与电感电流波形之和,即完成了斜坡补偿,其幅值应大于电流波形下斜坡的l/2。
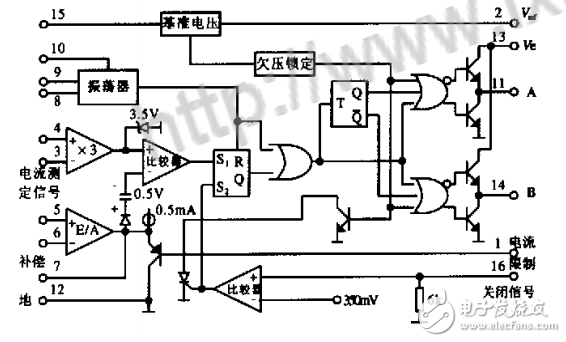
图2 UC3846的内部结构
图3给出了UC3846内部局部和外电路连结原理图。图中S为PWM寄存器,有两个置位端S1、S2,均可使y.。为高电平,封锁PWM输出。在设计中,用sl接受A,的输出,当输出电流I,大于给定值时,A3输出为高电平,从而形成PWM的后沿。S2端接受由外电路形成的两个控制信号K1、K2的控制。其中K1用作电路关断,K2为输出检测电流I经微分电路的输出,其作用是当电流变化率超过一定值时,关闭脉冲输出。图中R5C.构成斜坡校正网络,对输出电流进行校正。下面分别讨论电流环和电流变化率环的工作原理。
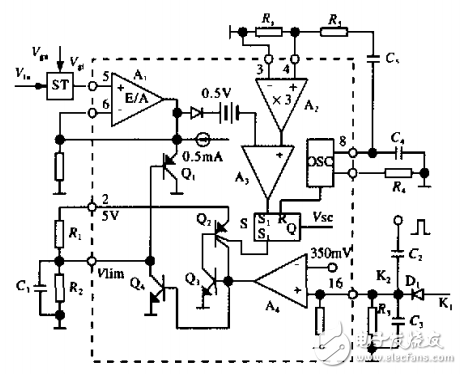
图3 部分uc3846内部结构与外部联线图
2.1.1、电流环的工作原理
当主控单元送出给定转速信号Vgn和电机实际转速Vfn在ST中调节后,生成给定电流信号Vgi,经误差放大器A1放大后,送至比较器A3负端,这时输出电流检测值I1。经风取样,并由A2放大后送至A3正端。一旦I5之值超限,A3输出高电平,使Vsc为高电平,形成PWM下降沿,限制PWM增宽。由于误差放大器带宽为1MHz,完全满足电
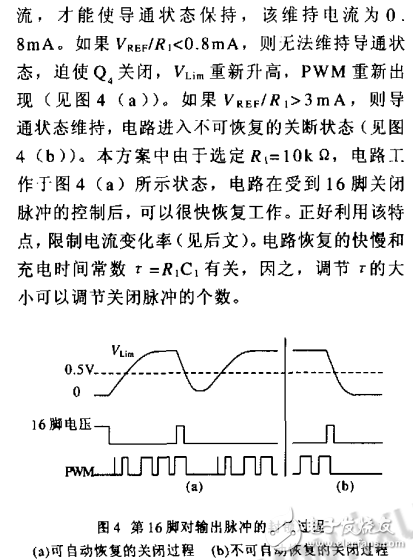
流闭环的跟踪速度。当Is超过系统容许值时,控制系统会产生K1信号通过16脚关断脉冲的输出。通过16脚关断UC3846的条件是:关闭脉冲的幅度应大于400mV,宽度大于600ns,负载电流大于2mA。当满足16脚的关闭条件后,比较器A4输出高电平,从而使Q3、Q4组成的可控硅导通,使电容器C1放电。根据R1、R2的取值不同,电
路将进入两种不同的工作状态,如图4中(a)、(b)所示。图3中l脚为最大电流限制端,兼有软启动功能。最大电流的限制值由R1、R2分压值决定。图4中VL,。为1脚实际电压曲线。开始时,VLim由ov开始对C1充电,当超过0.5v门限值后,开始形成PWM脉冲,该过程称为软启动过程。当C.电压升至R1、R2分压值时,Lim平顶。平顶时的电压值决定着系统最大输出值的大小。若想使该电流增大,可改变R1、R2分压值的大小,升高VLim之值。一旦16脚产生一正脉冲时,由于Q4导通,C1放电,Lim很快降至ov,这时PWM关闭。Q4在导通时要靠月,提供足够的维持电
3、控制系统的构成
一个实际控制系统如图6所示。控制单元根据速度反馈信号Vfn计算出给定电流Vgi,在PWM形成单元,根据故障信号K1、电流给定信号Vgi,电流反馈信号yfi、电流变化率信号yfb,通过UC3846产生需要的PWM信号。该信号送入驱动单元,经组合逻辑和位置信号WF进行相关运算,形成三相驱动信号,驱动逆变器中模块产生相应的三相输出,拖动电机运转。该组合电路的特点是:控制部分为单片机和专用集成芯片UC3846组成的混合结构,既体现了数字处理的灵活、精确,亦体现了模拟电路的廉价高速,是一十值得推广的电路。
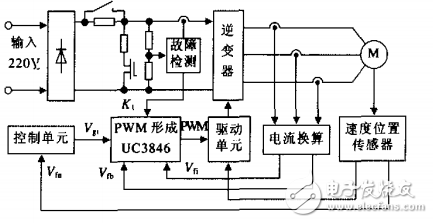
图6 驱动系统的结构
4、结论
在一些控制精度要求比较高,故障监测与保护要求实时性强,对过电流反应比较敏捷的复杂控制系统中,采用微处理器加专用集成电路组成的控制系统是一种最佳的选择。我们采用这种结构分别对22kW稀土永磁直流无刷电机拖动系统和50kVA、400—1600Hz中频逆变电源进行设计,控制系统不但使用了16位单片机87C196KC,而且还使用了电流型专用集成芯片UC3846。实践证明,这种结构的控制系统在电流控制方面超过了专用单片机,例如87C196MC、C164等。
-
UC3846电路分享2025-03-21 1507
-
UC3846脉宽调制高频开关稳压电源设计2021-08-31 2594
-
UC3846标准开关电源控制器2020-10-20 4893
-
基于UC3846的变频设计与应用2018-12-03 5846
-
基于UC3846的开关电源电压反馈的优化设计2018-10-22 3356
-
一种基于UC3846的变频设计与应用2018-01-26 12487
-
uc3846工作时各脚电压分别是多少2018-01-25 121353
-
uc3846中文资料2014-02-26 4715
-
用UC3846做推挽升压2013-12-02 5908
-
UC3846 SMPS Controller2009-10-16 684
-
uc3846 pdf,uc3846 datasheet2008-09-14 1891
全部0条评论

快来发表一下你的评论吧 !
