

基于MDA810电机驱动分析仪的电机驱动和交互控制测试
测量仪表
描述
电机驱动控制系统的调试往往需要查看动态事件中同时发生的控制 信号和功率波形,由此去理解之间因果关系,可视化动态功率行为 随时间的变化,以及和控制信号的关联。传统的功率分析仪仅仅提 供静态的功率(平均值)测量能力,非常有限的波形捕获能力,而 且不能测量控制信号。TeledyneLecroy MDA810 电机驱动分析仪提 供静态功率测量和动态功率分析能力,而且具有完整的嵌入式控制 测量能力,可以将控制信号和功率事件关联起来。
下面的示例演示了利用 Teledyne LeCroy MDA810 电机驱动分析仪 测量小型手持工具,这个工具采用了一个正弦调制的工作在高速模 式的永磁同步电机。电机的方向每秒反转一次。这个测量验证驱动 控制信号和工具的行为和动态功率行为的相关性,包括方向转换过 程中的功耗和在每个旋转方向上功耗的差异。目的是要了解和减少 在这期间不必要的功耗,如果功耗太高,可能会导致用户的不满意 及其他可靠性问题。
查看控制信号和速度命令/反馈信号
图 1 的例子展示的是使用 5 个 12bit,1GHz 的采集通道查看两路控 制信号(C1 和 C2)、轮子的编码位置信号(C3),电机的实际速度 (C4)和控制速度(C5)。测试工程师设计了一块外部控制板处理 C3 和 C4 的信号。这是由于这台电机是一台无传感器电机,这块外 部控制板仅仅是为了测试使用,不是最终产品的一部分。
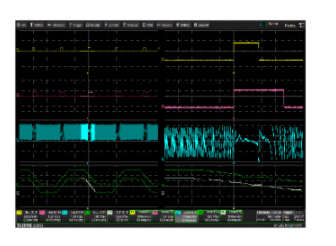
图 1 采集无传感器电机的位置、速度和控制信号
通道 1 和通道 2 的信号是电机控制旋转方向的控制信号,通道 1 的 上升沿发起电机反向旋转,通道 2 的下降沿表示电机反向旋转结束 的时间。采集长时间的数据(在这个例子中是 5s),可以查看很多的 转换周期。放大的波形(右边的栅格中)显示其中一个转换过程的 细节,可以清楚的展示控制信号和电机响应的时序。同时监测转换 时速度的变化,如 Z4 和 Z5 所示,通过这些信号,可以看到电机反 向旋转的很正常,和预期的一致。
电机驱动输出功率分析
在这个例子中,采用两瓦特计算法分析电机驱动的数据,计算三相 功率值。
图 2 是针对两瓦特计算法的探头连接方法。
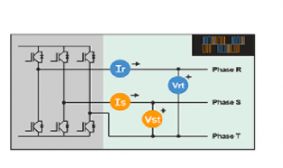
图 2 电机驱动连线设置-两瓦特计算法
二瓦特计算法允许只使用四路信号就可以计算三相系统的功率,留 下更多的通道可以捕获其他的驱动控制信号或功率行为信号。 MDA810 也支持三瓦特计算法。 两个高压差分探头(C1,黄色的波形,和 C2,红色波形)和两个 电流探头(C5 和 C6,绿色的波形,紫色的波形)连接到如图 2 中 的电路配置图描述的驱动电机的输出。
电压和线电流波形。该线路的电压波形和线路电流波形相位差是 120 度,这和三相系统的预期是一致的。在图 3 右边波形是左边波 形的放大。没有放大波形显示有很多噪声,但是放大的波形表明, 噪声是驱动输出开关器件的特性导致的。使用传统的 8 位示波器, 是观察不到的,但 MDA810 12 位采集系统具有观察这种细节所需 的分辨率。
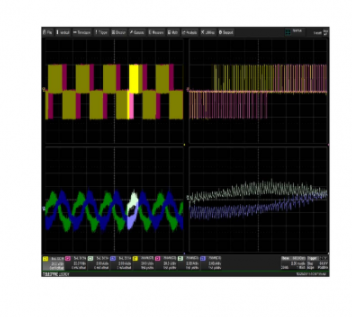
图 3 采集线电压和线电流
然后如图 4 所示,采集很长时间的一段数据,查看完整的电机旋转 方向的变化,计算方向变化之前,变化期间和之后的功率。其中感 兴趣的是在从一个方向转换到另一个方向的过程中消耗的能量,理 想情况是在这个转折点上没有能量的急剧增加,此次采集包含两个 电机方向转换。
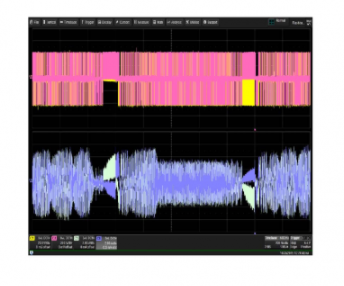
图 4 电机方向转换过程的采集
为了确定所有的电压、电流和功率计算需要的循环周期,一个信号 被选择为“参考周期”。在 MDA810 中,这被称为“同步”信号,同步 信号确定每周期电压、电流、功率、效率、机械参数以及其他值的 计算测量间隔,这通常需要滤除同步信号中的高频成分,以获得更 好的周期性,在 MDA810 中,实现起来非常简单。
图 5 显示的是使用 C1 线电压作为同步信号,并应用 500 Hz 低通滤 波的示例。图中的同步信号是在时基 20ms/div 下采集的,以展现一 个清晰的同步信号的,它和图 4 中 200 ms/div 的采集没有直接相关。 彩色的覆盖提供了对测量周期直观的视觉识别。同步信号被查看,以 验证周期是否正确识别,从而确保正确的功率计算。使用 MDA810 的 彩色叠加查看方式,很容易验证测量周期是否正确确定。
图 5 同步信号的彩色叠加
一旦确认测量周期被正确确定了,同步信号就可以关闭了。 图 6 和图 4 采集的信号相同,但是增加了旋转方向反向控制信号和 各种数值表和统计值,以及其他的波形。采集的波形是电压(C1 和 C2),电流(C5 和 C6),控制(C4)。

图 6 功率计算值表和图形
在这个例子中,我们最感兴趣是在数值表中显示的电机的电压有效 值、电流有效值,有功功率,视在功率、无功功率、功率因数、相 位角,以及这些测量参数在所有采集波形中的平均值,很像功率分 析仪的功率测量功能。P(ΣRST)和 S(Σ(RST)波形(在右下 角叠加在一起)是每周期的测量值随时间变化的合成图,时间是和 原始采集波形相关的,通过触摸或点击数字表格单元格的值就可以 创建,这些每周期波形清楚的显示了电机驱动输出和电机的动态行 为,仅仅查看数值表中的值,有些东西是无法查看到的。查看有功 功率和视在功率在电机方向转换过程中的每周期波形,提供了洞察 每个方向变化中的功耗的能力,在这样的应用中,这是非常重要 的,由于我们使用的演示电机是一个手持工具的一部分,需要功耗 被最小化。 让我们仔细观察感兴趣的其中一个转换过程,我们可以使用 MDA810 强大的 Zoom+Gate 功能。Zoom+Gate 提供了一个简单的方法放大 所有的输入源,细化波形和同步信号,可以将放大窗口设置在波形的 任何部分,这个常用的缩放窗口被作为一个数值统计表的测量门限使 用。图 7 显示的是使用 Zoom+Gate 限定感兴趣的区域–从一个旋转 方向的转变到另一个方向,这是一个完整的循环周期如 DrvOutSyncZ 同步信号,每周期波形和统计表所示。
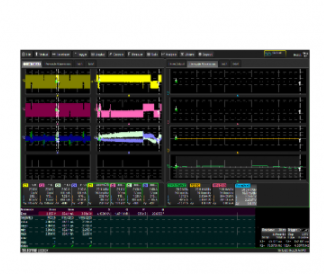
图 7 Zoom+Gate 显示电机转换区域
在方向转换过程中的功耗是 3.894W,对于待测电机来说,这是合 理的。 通过确定在操作过程中的热损失。可以进一步分析电机的功耗,我 们可以通过设置 MDA810 的谐波滤波器,在全频谱和基本频谱时, 同时测量有功功率。比较这些结果后,我们可以用全频谱和基本频 谱有功功率之间的差异,计算绕组的热损失,谐波滤波器的设置定 义了滤波器,将它应用到输入波形进行功率计算。它可以被定义在 交流输入和驱动输出。 举例来说,交流输入谐波滤波器设置为全频谱和驱动器输出的谐波滤 波器设置为基本频谱。电压和电流输入设置为相同的通道。所以在功 率计算中的唯一的差异是测量的谐波。图 8 和图 7 采集的波形是相 同的,但是使用 Zoom+Gate 限定一个电机的旋转工作周期。在测量 值表中的 ΣABC 参数代表全频谱的功率值,而 ΣRST 参数代表基本 频谱测量值。使用游标,我们可以测量电机的运行周期的时间,然后 从功率参数计算出焦耳。
图 8 计算绕线损耗
在数值测量表中显示 ΣABC 的功率值为 3.668 W,使用游标测量的 时间长度是 907.68ms,这个值可以在图 8 右下角的 Δx 处看到。使 用公式转换为焦耳,能源消耗 ΣABC 的能量消耗是 3.33 焦耳。在 ΣRST 上用同样的方法,我们计算所消耗的能量为 2.51 焦耳。两者 相减,我们得到 0.82 焦耳。0.82 焦耳代表这个工具在一个方向切换 到另一个方向的绕组热损耗 让我们来再看一个例子,其中的功率波形表明一些问题与电机运行有 关。在下面的这个例子中,我们使用两瓦特布线配置测试相同的电机。 它也可以显示电机的位置(C3:编码器的位置,C7:无位置传感器)、 控制(C4)、速度(C8)、功率(P(ΣRST)和 S(ΣRST))信号(图 9),值得注意的是,在顺时针旋转的每周期 P(ΣRST)和 S(ΣRST) 功率波形平滑一致,在逆时针旋转,在信号中有一个振荡。这可以通 过在图 9 右上角的功率波形观察到。

图 9 无传感器功率波形显示逆时针时的震荡
观察到这种振荡后,进一步的调查发现了一个与电机交换相关的问 题。这个问题又被追溯到一个无传感器控制问题。无传感器控制问 题校正后的功率波形如图 10 所示。

图 10 无传感器电机逆时针旋转时显示平滑的功率波形
总结
能够查看电机驱动输出波形和测量电机的动态运行特性,包括动态功 率值,将动态行为和控制系统动作关联起来,可以提供对电机驱动系 统整体性能有价值的洞察。使用 MDA810 功能强大的工具和动态测 试能力,相比功率分析仪静态的测试能力,带来对这些事件更深入的 理解。MDA810 动态功率测量以及完整的嵌入式控制测试能力,将功 率事件和控制信号关联起来,提供对完整电机测试无与伦比的调试和 分析。
-
使用MDA8108HD电机驱动分析仪进行复杂的电机驱动和交互控制测试2024-03-01 3033
-
使用特励达力科MDA8000HD电机分析仪测试电机的转速、角度和位置2024-01-17 3037
-
如何高效评价电动汽车的驱动电机与控制器?2018-10-21 3908
-
工程师必知的电机驱动效率和性能五个关键测试点2019-06-27 4107
-
MA-420尿液分析仪打印机电机驱动电路2009-02-28 1154
-
力科发布用于HDO8000示波器的电机驱动功率分析仪软件2014-10-14 1725
-
Teledyne LeCroy 发布电机驱动分析仪2015-02-09 1750
-
单细胞分析仪中步进电机的定位控制_金路2017-01-17 889
-
基于MDA810电机驱动分析仪测试验证2017-08-29 935
-
福禄克提供简单有效的电机驱动故障诊断方案2018-10-12 7140
-
福禄克重点推出针对测试电机驱动日常故障排查的全新电机驱动分析仪2018-11-26 8767
-
Fluke MDA-510和MDA-550电机驱动分析仪的性能特点及应用2021-01-31 2941
-
发电机及关键任务测试应用——电能质量分析仪Dranetz HDPQ系列2023-05-12 1500
-
如何使用电能质量分析仪测试变频驱动器的输出?2023-10-22 1689
-
功率分析仪测量指南:电机参数 Ld(直轴电感)、Lq(交轴电感)2026-04-20 182
全部0条评论

快来发表一下你的评论吧 !
