

测量走离期间的雷达PRI的参数差
测量仪表
描述
许多技术可以被航空器用来避免雷达的探测。军用航空器常用的一个雷达欺骗方法是使用渐进式多普勒移位将接 收到的雷达脉冲再传输。多普勒移位可以模仿与实际情况所不同的速度和/或方位的速率效果。
脉冲重复间隔(PRI)是指相邻脉冲之间在时间上的距离。通过以统一的时间增量参差 PRI,电子对抗技术(ECM) 使得飞行器可以通过返回雷达识别标志指示错误的飞行器速度和方向,从而潜在的避免被搜索雷达所跟踪。因地基雷达 持续的追踪错误的目标范围信息,使其逐渐离开真实的目标,正躲避的飞行器因其速度被追踪失败从而会从雷达上消失。
由于频谱分析仪具有较高带宽和示波器具有较低带宽的传统历史,所以 X,K,V,以及 W频带的雷达信号的超高频成 分通常需要使用频谱分析仪和频域设备进行测试。频谱分析仪可以确定信号的频率成分,但其所面临的一个挑战是此类 频域仪器无法精确的描述时间信息。然而,随着最近几年超高带宽示波器的发明(实时示波器的模拟带宽如今已经能够 达到 100 GHz),W波段雷达信号的全部频谱成分都能够被捕获。使用时域设备捕获雷达信号,能够实现精确的电子 对抗(ECM)飞行线测试,包括区间 PRI,PRI 时间波动变化,脉冲占空比,以及其它调制脉冲的参数测量和参数追踪, 每一种测量的具体描述如下。
图 1描述了一个硬件测试设置的示例,包括一个 F-16耦合器,一台实时示波器,以及一台射频仿真和测试单元。 RFSM单元通过编程产生 PRI摇摆,并通过一条 2.92mm接口的线缆连接到实时示波器。

图 1: 电子对抗飞行线测试的硬件设置
图 2中最顶部的蓝色波形显示的是采集到的一系列雷达脉冲,突发脉冲之间出现了很长的空闲间隔。时基设置为 捕获 2 毫秒的时间,160 Mpts 的连续采样点,采样率为 80 GS/s。第二格中的橙色波形使用了解调函数功能产生每一个 雷达脉冲的包络。第三格显示了一个放大曲线(蓝色),并叠加有单个脉冲的调制波形,且第四格(绿色曲线)显示了 对载波信号放大曲线以 200秒/格的再放大。
参数的周期测量,参数 3(绿色框圈出的),输出了 F1 函数曲线的周期。函数 F1 是一个解调的雷达脉冲及每一 个突发脉冲的包络显示。参数的时序测量被直接应用到解调函数波形上,周期参数直接计算出走离期间系列雷达脉冲的 PRI。使用测量区间功能框住开始的两个脉冲,可以得到 PRI为 510.0024 us,形成一个区间的 PRI 测量。

图 2: 走离 期间 510.0024 us 的 区间 PRI
移动测量区间至跟随 PRI变化的每一个连续变化的脉冲组,如下图 3 所示,框住第三个脉冲系列可以得到走离期 间 520.0013 us 的 PRI参差。
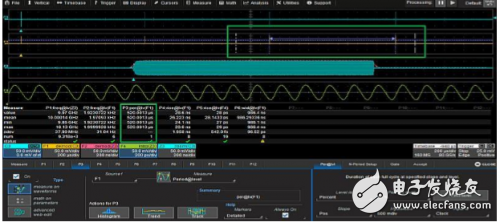
图 3: 走离 期间 510.0013 us 区间 PRI
更长的实时采集提供了对系统行为进行更加深入的洞察。通过在连续的 5 秒捕获时间窗口采集 400,000,000 个连续 的样本点(每 12.5 ps 采集一个点),可以得到一幅更大的景象。频率和周期被直接从解调后的波形中计算得到,脉冲 重复频率和脉冲重复间隔显示在图 4 中的 P2和 P3中。通过对 P3 测量参数使用一个追踪函数(橙色的 F5 函数曲线),
PRI 参差被精确的描绘成时间的函数,且以明显的楼梯台阶形状进行显示。因为 PRI 参差已经以一个实时波形曲线存在, 所以更多的测量和函数能够被用来对 PRI参差更为细致的分析进行追踪。
除了参数 2 和参数 3 中的 PRF和 PRI,参数 1给出了蓝色放大区域 Z3 的载波频率。参数 4 和 5 分别测量了脉冲包 络和载波的上升时间,参数 6 测量了解调后的 RF脉冲包络的宽度。
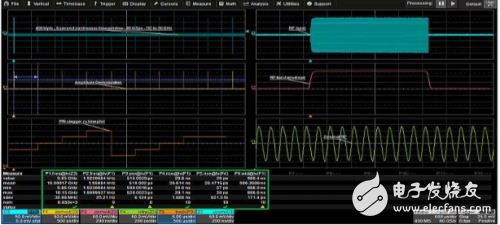
图 4: PRI 曲线的 400 Mpts 采集 (5 秒采集窗口 )
RF 突发 脉冲 参数包括 PRI ,PRF ,雷达载波上升时间,以及调制脉冲包络的上升时间和宽度。
当 PRI参差未被用于 ECM技术时,连续雷达脉冲的瞬时 PRI参差是随机的。关闭 PRI参差后,PRI的追踪曲线如 下图 5 的函数 F5 所示,可以确认为随机变化。请注意在图 5 的随机波动期间函数 F5的 Y轴刻度被自动调整为 500 ps/div,而图 4 中 PRI参差使能后,F5 的刻度被自动调整为 5 us/div。如果随机 PRI波动的 Y轴也设置为 5 us/div以与图 4 相匹配,那么图 5 中的 PRI追踪将显示为一条平线(表示 PRI参差是存在的)。

图 5: PRI
图形显示了稳定的 PRI的随机 PPM波动 : 500.0014 us 到 500.0026 us ,500 ps/div Y轴追踪自动刻度调整
图 6中,PRI被重新使能,而且一个额外的测量参数被增加到测量表格中。参数 P7 现在被用于计算解调雷达突发 脉冲包络的的占空比并展现出一个极低占空比为 0.193214%的独特雷达。如果没有事先解调雷达脉冲,此类型的测量几 乎不可能。不这样的话,占空比参数的测量将是基于载波的波动而非解调后的脉冲。
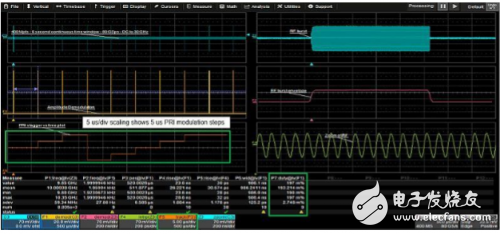
图 6: PRI 图显示了 PRI 参差 从 500 us 到 520 us的波动。解调脉冲的占空比参数测量值 0.193214% 。
最近,因使用频域设备无法完成对时间信息如走离 PRI 参差的精确描述,而随着最近超高带宽实时示波器的出现, 雷达系统的时序特征定义如脉冲的占空比,PRF,以及走离 PRI参差,能够在雷达和电子战领域通过使用时域的参数工 具进行精确的描述。
-
固态激光雷达参数以及避障视频2026-03-27 747
-
使用XMC4800来控制PMSM,在控制PMSM期间应该测量哪些电机参数?2024-01-23 570
-
聊聊雷达的参数测量那些事儿2022-12-27 2308
-
PRI/PRF的种类及对分选算法有何影响2022-11-28 6156
-
导波雷达料位计的测量原理,如何安装?2021-03-18 2825
-
雷达参数测量的详细资料概述2020-12-30 1237
-
聊聊雷达参数测量的那些事儿2020-10-30 1718
-
如何查看雷达参数的测量,功率/频谱的测量2020-06-09 4607
-
雷达测量 功率、频谱及其相关参数的测量2020-03-22 1960
-
相控阵测量雷达跟踪精度分析2018-03-06 1189
-
走离区间pri参差测量图2017-08-29 1410
-
雷达信号综合分选方法研究2013-01-29 1087
-
基于PRI变换的未知雷达信号分选算法研究2012-02-09 987
全部0条评论

快来发表一下你的评论吧 !
