

C-V2X联合RTK技术的场景仿真方案
描述
《中华人民共和国国民经济和社会发展第十四个五年规划和 2035年远景目标纲要》提出:
积极稳妥发展工业互联网和车联网”。车联网与智能网联汽车、智慧交通、智慧城市建设紧密相关。如今,伴随蜂窝车联网(CellularV2X,C-V2X)产业发展进入新阶段,规模应用与商业部署将成为行业主旋律,赋能我国汽车产业从新能源汽车的上半场转移到智能网联汽车的下半场,并从全球竞争中胜出。
伴随着我们车辆网事业的蓬勃发展,C-V2X场景测试也在如火如荼的进行中,但是我相信做过c-V2X场景测试的小伙伴一定遇到过一个很头痛的问题:传统的GNSS定位精度无法满足C-V2X场景中厘米级导航定位的需求,因为传统的GNSS 定位误差在实际生活中可能要超过半米,甚至是1米,这样导致的最直接的结果就是在场景里因为定位误差太大导致算法无法验证,无法进一步后续的测试,行业迫切需要引入高精定位技术。
那么问题来了?
在C-V2X的场景仿真测试中,我们如何来引入高精定位技术呢?首先我们先来了解一下高精定位技术RIK。
什么是RTK?
RTK(Real Time Kinematic)实时动态测量技术,是以载波相位观测为根据的实时差分GPS(RTDGPS)技术,它是测量技术发展里程中的一个突破,它由基准站接收机、数据链、流动站接收机三部分组成。在基准站上安置1台接收机为参考站,对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS-84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。
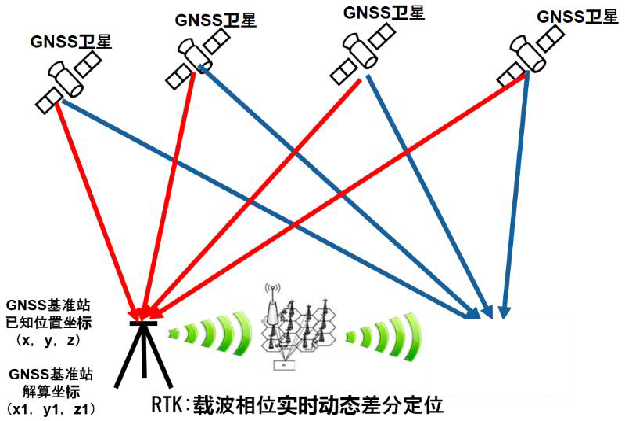
从RTK 的工作原理介绍,我们可以看到RTK 定位是需要无线通讯技术参与进来的,通过LTE/5G 或Wifi 执行从基站到流动站的数据传输。一种常用的方法是“通过Internet协议的RTCM 网络传输”(NTRIP)。因此,基站通过NTRIP服务器将其数据提供给所谓的NTRIP Caster。流动站获取RTK GNSS 定位所需的数据是通过NTRIP 客户端从NTRIP Caster 收集的。
在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不足一秒钟。流动站可处于静止状态,也可处于运动状态;可在固定点上先进行初始化后再进入动态作业,也可在动态条件下直接开机,并在动态环境下完成整周模糊度的搜索求解。
既然RTK是这么强大的一种定位技术,那我们何不把它融入到C-V2X 场景仿真测试中呢?罗德与施瓦茨公司就是世界上兼具蜂窝网络仿真和卫星定位仿真能力为一体的少数几家公司之一,接下来小伙伴跟随我一起看看罗德与施瓦茨是如何把这两大武功派系融为一体 的吧。
RTK如向助力V2X?
众所周知,罗德与施瓦茨在蜂窝通讯仿真领域一直是行业翘楚,在卫星仿真测试产品上也处于业界领先地位,自家两大拳头产品 C-V2X 加持 RTK 高精定位方案正是罗德与施瓦茨产品强强联合的优秀结晶,也预示这该解决方案可以完美解决行业痛点问题,同时也是作为行业头部企业一种责无旁贷的义务。
首先我们来看一下该方案的逻辑示意图 , 让各位小伙伴先有一个大概的印象。
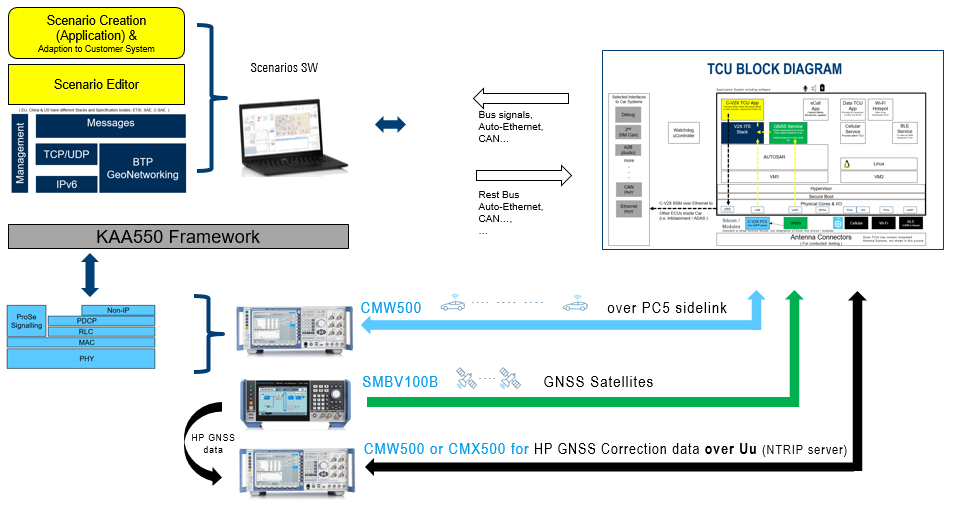
▲仿真系统拓扑图
系统组成
从上图可以看出, 整个仿真系统需要用到两台综测仪CMW500,一台卫星信号仿真器SMBV100B 以及C-V2X场景测试需要的软件。因此罗德与施瓦茨的V2X联合RTK仿真有三台仪表组成, 这三台仪表的分工如下:一台CMW500 或者CMX500仿真4G 或者5G 基站, 另外一台CMW500仿真 C-V2X信号, SMBV100B仿真卫星信号和RTK仿真。所有这些仪表和场景软件PC都通过网线连接到同一个路由器上, 所有设备的IP 地址均在同一个网段。
系统工作原理如下:
SMBV100B产生 GNSS 信号和RTK仿真,提供NTRIP 数据仿真。
被测设备首先通过GNSS天线和SMBV100B进行时间同步。之后被测设备开始进入到PC5 工作模式。
被测设备通过UU口接入到CMW500 或者CMX500, 同时获取CMW500或者CMX500分配的IP地址,被测设备通过这个IP 地址去访问SMBV100B产生的RTCM3.3 差分数据,进行RTK 定位。
场景软件开始运行, 控制CMW500 C-V2X 产生PC5 信号, 与被测件进行PC5消息通讯。
运行相关的需要车道级导航或者高精定位的场景,验证场景的算法和决策可以进行厘米级的定位测试需求。
测试界面:
下图是SMBV100B仿真的NTRIP server 和差分数据:
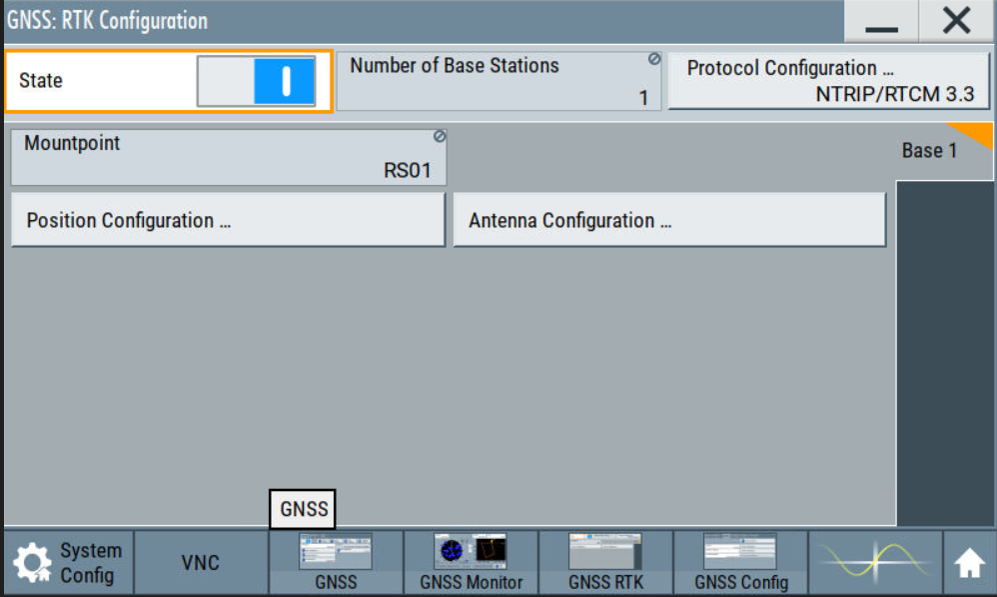
▲NTRIP 服务器仿真示意图
下图是CMW500 的DAU 功能给TBOX 提供的可以进行网络连接的IP 地址。
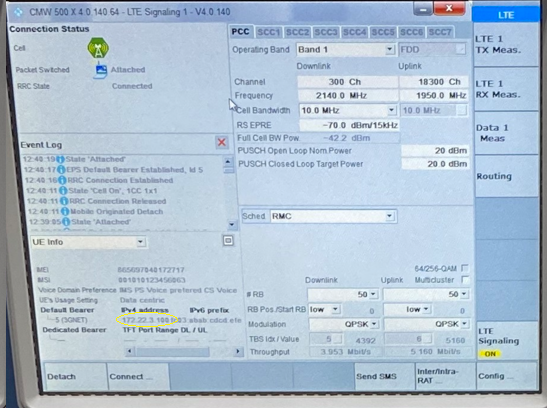
▲基站仿真示意图
下图表示 TBOX 通过这个IP 地址连接到SMBV100B仿真的NTRIP server获取差分数据,成功进行RTK高精定位。
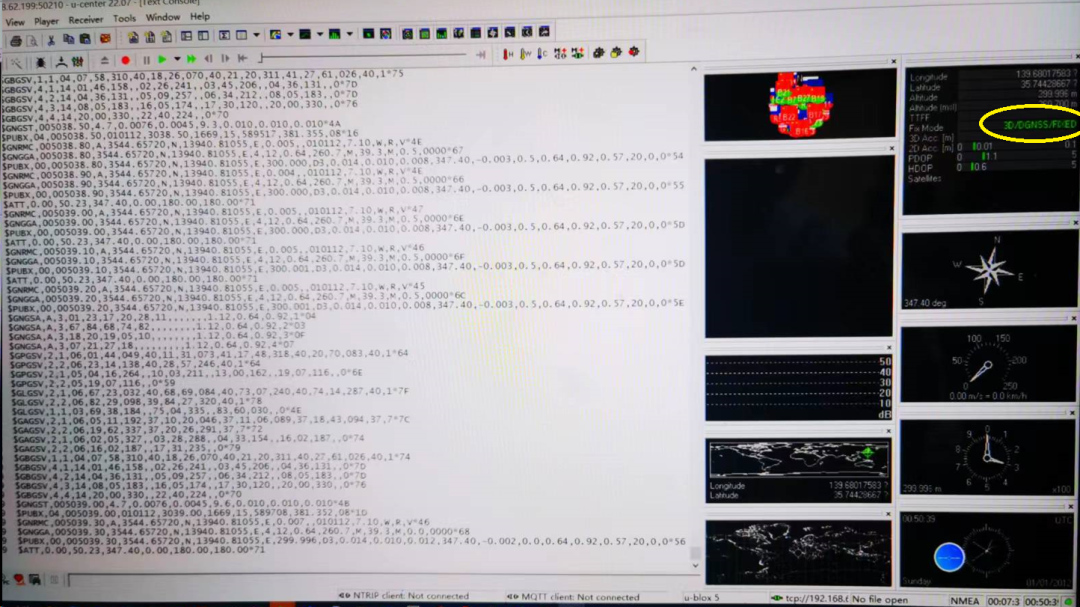
▲RTK定位成功示意图
下图表示TBOX 已经和一辆由第二台CMW500 仿真的支持V2X 功能的车辆进行通讯成功!
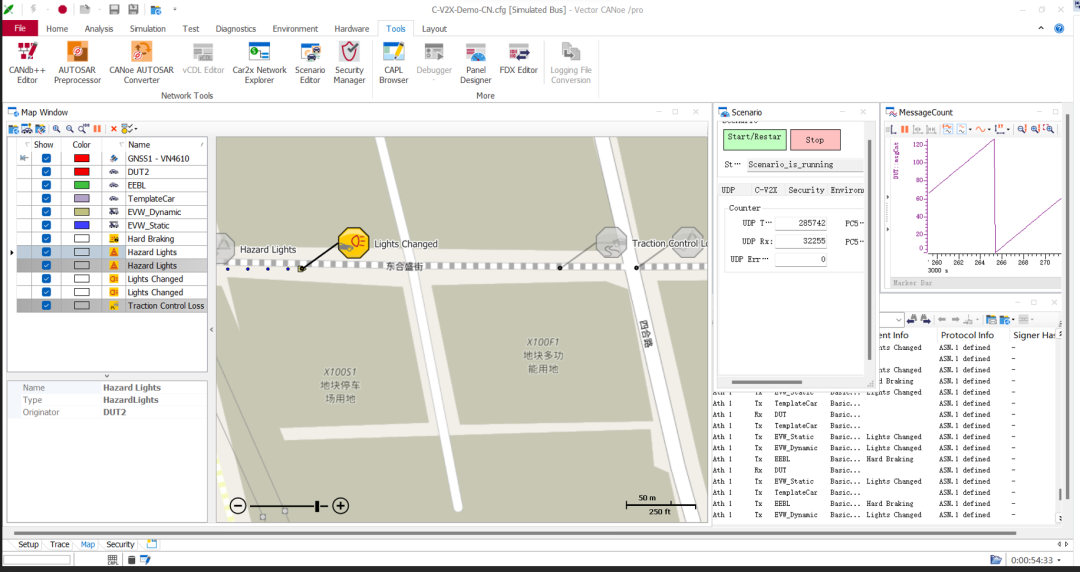
▲场景仿真示意图
这个方案,首先利用了罗德与施瓦茨综测仪的单台仪表可以全覆盖的能力,不仅仅可以覆盖GSM, WCDMA, LTE,还可以覆盖 C-C2X技术。
其次, 充分利用了内置数据处理单元的优势,通过被测件注册到CMW500从而获取可以接入到SMBV100B的IP地址, 进而获取RTCM差分数据,实现RTK 高精定位。
各位小伙伴看到这里,是不是有种似曾相识的感觉?对,其实这一步是仿真了目前国内的千寻的工作模式,我们的技术无时无刻不在!!
最后, CMW500 C-V2X仿真是提供一个API接口给到V2X上层仿真软件,这个接口可以对接任何V2X场景软件,包括但是不限于Vector,Prescan,VTD, Carmaker等等任何场景软件。
结语
各位小伙伴, 想想这么强大的V2X加上RTK联合仿真测试解决方案, 您不动心吗?
好了,今天关于C-V2X联合RTK技术的场景仿真方案介绍, 就给各位小伙伴介绍到这儿, 对方案感兴趣的小伙伴欢迎订阅下载转发, 好的东西记得分享哦!
罗德与施瓦茨业务涵盖测试测量、技术系统、网络与网络安全,致力于打造一个更加安全、互联的世界。 成立90 年来,罗德与施瓦茨作为全球科技集团,通过发展尖端技术,不断突破技术界限。公司领先的产品和解决方案赋能众多行业客户,助其获得数字技术领导力。罗德与施瓦茨总部位于德国慕尼黑,作为一家私有企业,公司在全球范围内独立、长期、可持续地开展业务。
-
Qualcomm发布 C-V2X 商用解决方案2017-09-21 7256
-
车联网C-V2X的概述和国际国内发展基础和现状及国内C-V2X发展建议2018-07-06 18751
-
C-V2X 技术介绍 精选资料推荐2021-07-23 1614
-
5分钟成为车联网专家|如何实现C-V2X技术突破把住车联网发展命门 精选资料分享2021-07-27 2512
-
Qualcomm和汽车厂商推动C-V2X商用 PSA与高通宣布C-V2X测试取得进展2018-02-24 1652
-
浅析C-V2X车联网会如何发展2018-10-06 8086
-
分析MEC与C-V2X融合应用场景2019-02-25 10256
-
中兴通讯成功验证了C-V2X通信安全技术解决方案2019-10-28 2160
-
R16为C-V2X提供清晰的演进路径2020-07-09 1785
-
简单认识C-V2X2020-12-29 11302
-
解析C-V2X车联网的发展趋势2021-01-28 4713
-
从实验室到试验场:罗德与施瓦茨携手奥迪进行C-V2X道路交通场景测试2021-12-08 1894
-
大话中国C-V2X通讯标准应用层标准2022-07-27 3345
-
C-V2X仿真测试之虚拟场景设计2022-08-01 2763
-
是德科技出席2024 C-V2X“四跨”(上海)先导应用实践活动2024-11-06 1764
全部0条评论

快来发表一下你的评论吧 !
