

零基础开发小安派-Eyes-S1外设篇——GPIO 输入输出
描述
AiPi-Eyes-S1是安信可开源团队专门为Ai-M61-32S设计的一款开发板,支持WiFi6、BLE5.3。所搭载的Ai-M61-32S 模组具有丰富的外设接口,具体包括 DVP、MJPEG、Dispaly、AudioCodec、USB2.0、SDU、以太网 (EMAC)、SD/MMC(SDH)、SPI、UART、I2C、I2S、PWM、GPDAC、GPADC、ACOMP 和 GPIO 等。
AiPi-Eyes-S1集成了SPI屏幕接口,DVP摄像头接口,外置ES8388音频编解码芯片以及预留TF卡座,并且引出USB接口,可接入USB摄像头。
从零开始学习小安派:
1、零基础开发小安派-Eyes-S1【入门篇】——初识小安派-Eyes-S1
2、零基础开发小安派-Eyes-S1【入门篇】——安装VMware与Ubuntu
3、入门篇:零基础开发小安派-Eyes-S1——新建工程并烧录调试
4、零基础开发小安派-Eyes-S1入门篇——Win下SSH连接Linux
5、零基础开发小安派-Eyes-S1【入门篇】——Samba共享文件夹
6、零基础开发小安派-Eyes-S1【入门篇】——工程文件架构
博流系列的芯片驱动分为两类,LHAL 和 SOC,使用 LHAL 库驱动外设十分方便,因为其对通用外设进行了统一的封装,在使用博流的不同芯片时他们的接口一致,方便使用和移植。而 SOC 则是作为特殊部分使用,如 GLB、HBN、PDS、AON 等等。
一、了解 LHAL 库和小安派-Eyes-S1 外设
LHAL 库配备了一个结构体作为通用外设的配置工具——struct bflb_device_s
struct bflb_device_s {
const char *name;uint32_t reg_base;
uint8_t irq_num;
uint8_t idx;
uint8_t sub_idx;
uint8_t dev_type;
void *user_data;
};
对芯片的所有操作其实都是基于对寄存器的配置,所以该结构体的成员中较为重要的为 reg_base 和 irq_num ,有了这两个才能操作外设寄存器和外设中断。
在配置之前,我们也得先初始化结构体获得它的句柄,有两种方式
1.bflb_device_get_by_name 通过 name 获取
2.bflb_device_get_by_id 通过 dev_type 和 idx 获取
获得的句柄会在一个 table 表中,详情可以看 lhal/config/xxx/device_table.c 文件。
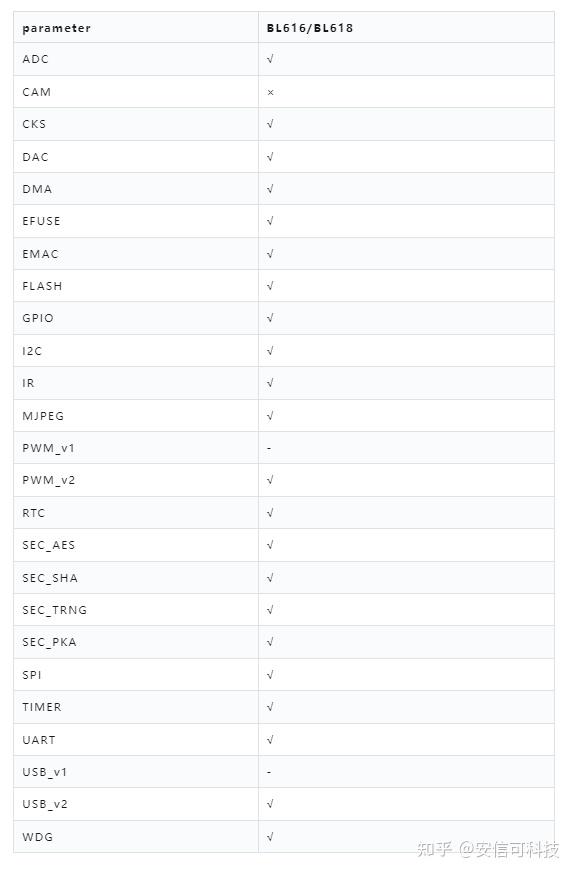
小安派-Eyes-S1 所支持的外设 LHAL 库 API 有如下:√ 表示已支持,× 表示未支持,-表示没有该外设
二、GPIO 配置简介
1.头文件 bflb_gpio.h
2.gpio mode
gpio 的模式可以设置为四种,分别是输入、输出、模拟、复用
#define GPIO_INPUT (0 << GPIO_MODE_SHIFT) /* Input Enable */
#define GPIO_OUTPUT (1 << GPIO_MODE_SHIFT) /* Output Enable */
#define GPIO_ANALOG (2 << GPIO_MODE_SHIFT) /* Analog Enable */
#define GPIO_ALTERNATE (3 << GPIO_MODE_SHIFT) /* Alternate Enable */
3.gpio pupd
gpio 可以选择上拉、下拉、浮空
#define GPIO_FLOAT (0 << GPIO_PUPD_SHIFT) /* No pull-up, pull-down */
#define GPIO_PULLUP (1 << GPIO_PUPD_SHIFT) /* Pull-up */
#define GPIO_PULLDOWN (2 << GPIO_PUPD_SHIFT) /* Pull-down */
4.gpio smt
gpio 滤波开关
#define GPIO_SMT_DIS (0 << GPIO_SMT_SHIFT)
#define GPIO_SMT_EN (1 << GPIO_SMT_SHIFT)
5.gpio drive
gpio 输出能力选择
#define GPIO_DRV_0 (0 << GPIO_DRV_SHIFT)
#define GPIO_DRV_1 (1 << GPIO_DRV_SHIFT)
#define GPIO_DRV_2 (2 << GPIO_DRV_SHIFT)
#define GPIO_DRV_3 (3 << GPIO_DRV_SHIFT)
6.gpio init trig mode
gpio 外部中断的触发模式
#define GPIO_INT_TRIG_MODE_SYNC_FALLING_EDGE 0
#define GPIO_INT_TRIG_MODE_SYNC_RISING_EDGE 1
#define GPIO_INT_TRIG_MODE_SYNC_LOW_LEVEL 2
#define GPIO_INT_TRIG_MODE_SYNC_HIGH_LEVEL 3
#if defined(BL702)
#define GPIO_INT_TRIG_MODE_ASYNC_FALLING_EDGE 4
#define GPIO_INT_TRIG_MODE_ASYNC_RISING_EDGE 5
#define GPIO_INT_TRIG_MODE_ASYNC_LOW_LEVEL 6
#define GPIO_INT_TRIG_MODE_ASYNC_HIGH_LEVEL 7
#else
#define GPIO_INT_TRIG_MODE_SYNC_FALLING_RISING_EDGE 4
#define GPIO_INT_TRIG_MODE_ASYNC_FALLING_EDGE 8
#define GPIO_INT_TRIG_MODE_ASYNC_RISING_EDGE 9
#define GPIO_INT_TRIG_MODE_ASYNC_LOW_LEVEL 10
#define GPIO_INT_TRIG_MODE_ASYNC_HIGH_LEVEL 11
#endif
7.gpio uart function
每个 gpio 都可以选择到 Uart 的任意一个功能,当然区别是在初始化时的选择
#define GPIO_UART_FUNC_UART0_RTS 0
#define GPIO_UART_FUNC_UART0_CTS 1
#define GPIO_UART_FUNC_UART0_TX 2
#define GPIO_UART_FUNC_UART0_RX 3
#define GPIO_UART_FUNC_UART1_RTS 4
#define GPIO_UART_FUNC_UART1_CTS 5
#define GPIO_UART_FUNC_UART1_TX 6
#define GPIO_UART_FUNC_UART1_RX 7
#if defined(BL808) || defined(BL606P)
#define GPIO_UART_FUNC_UART2_RTS 8
#define GPIO_UART_FUNC_UART2_CTS 9
#define GPIO_UART_FUNC_UART2_TX 10
#define GPIO_UART_FUNC_UART2_RX 11
#endif
三、gpio 的初始化及使用
1.bflb_gpio_init
说明: gpio 的初始化函数
void bflb_gpio_init(struct bflb_device_s *dev, uint8_t pin, uint32_t cfgset);

2.bflb_gpio_deinit
说明: 反初始化 gpio,默认为输入浮空状态
void bflb_gpio_deinit(struct bflb_device_s *dev, uint8_t pin);

3.bflb_gpio_set
说明: gpio 输出高电平
void bflb_gpio_set(struct bflb_device_s *dev, uint8_t pin);
4.bflb_gpio_reset
说明: gpio 输出低电平
void bflb_gpio_reset(struct bflb_device_s *dev, uint8_t pin);

5.bflb_gpio_read
说明: 读取 gpio 电平
bool bflb_gpio_read(struct bflb_device_s *dev, uint8_t pin);

编辑
四、示例——GPIO 输出点亮 LED 灯、GPIO 输入采集电平并打印
直接用 SDK 里的 GPIO 示例稍作修改。并逐步解释代码实现。
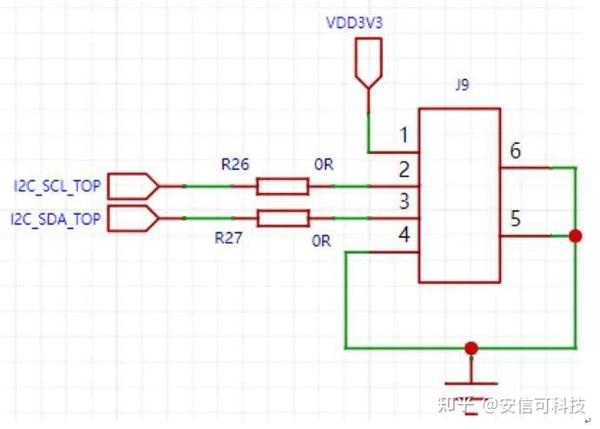
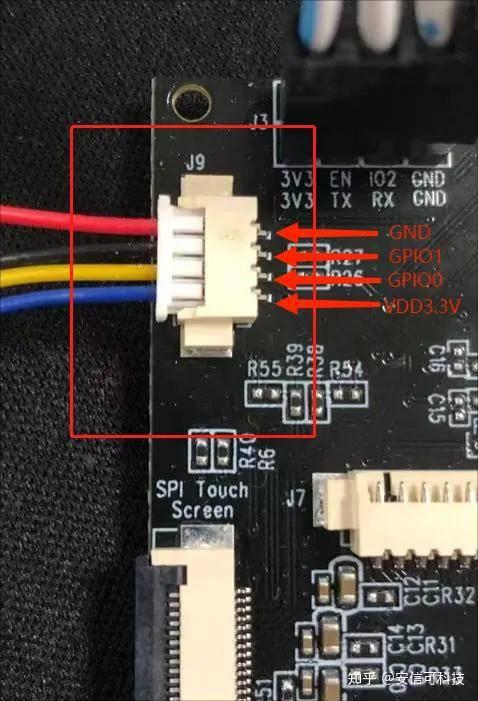
查看原理图,这里已经标注了预留的接口,需要飞线(幸好找到一个合适的座子)
1.main
#include "bflb_gpio.h" //gpio头文件
#include "bflb_mtimer.h" //mtimer定时器头文件,可使用里面的延时函数
#include "board.h" //开发板头文件,包含LHAL库等
struct bflb_device_s *gpio; //初始化一个结构体指针作为外设句柄命名为gpio,
int main(void)
{
board_init(); //开发板初始化
gpio = bflb_device_get_by_name("gpio"); //给前面的gpio句柄赋值对外设进行操作,这里的名字
//可使用的外设全部命名在bl616_device_table这个结构体数组里,我们所有使用的外设命名与上面列表中支持的外设列表
//也可以在函数定义里查看所有可支持的外设名称,命名一定要匹配。
printf("gpio outputrn"); //printf函数已经重定义为输出在串口0上,我们作为LOG查看
bflb_gpio_init(gpio, GPIO_PIN_0, GPIO_OUTPUT | GPIO_PULLUP | GPIO_SMT_EN | GPIO_DRV_0);
//gpio初始化,第一个参数为句柄,第二个参数为pin,第三个为GPIO的配置,这里配置为输出、浮空、滤波打开、驱动等级0
bflb_gpio_init(gpio, GPIO_PIN_1, GPIO_INPUT | GPIO_PULLUP | GPIO_SMT_EN | GPIO_DRV_0);
//gpio初始化,第一个参数为句柄,第二个参数为pin,第三个为GPIO的配置,这里配置为输入、浮空、滤波打开、驱动等级0
while (1) {
bflb_gpio_set(gpio, GPIO_PIN_0);//将pin0设置为高电平
printf("33[0;34m GPIO_PIN_1=%x33[0m rn", bflb_gpio_read(gpio, GPIO_PIN_1));
//这里的33[0;34m为函数的打印字体、前景色、后景色的设置,只是将打印的信息赋予颜色,感兴趣的同学可以百度
//bflb_gpio_read读取pin1的电平,返回true为高电平,false为低电平
bflb_mtimer_delay_ms(2000);//延迟2000毫秒,也就是2秒
bflb_gpio_reset(gpio, GPIO_PIN_0);
printf("33[0;35;40m GPIO_PIN_1=%x33[0m rn", bflb_gpio_read(gpio, GPIO_PIN_1));
bflb_mtimer_delay_ms(2000);
}
}
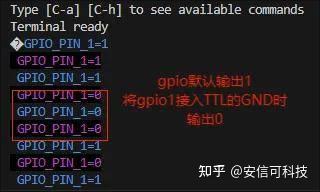
2.实现效果,GPIO0 每两秒循环亮灭一次,每两秒打印 GPIO1 的电平
审核编辑 黄宇
-
零基础开发小安派-Eyes-S1 进阶篇 ——通过屏幕输入连接 Wi-Fi2025-01-16 1158
-
零基础开发AiPi-Eyes-S1——通过屏幕输入连接Wi-Fi2025-01-15 1331
-
零基础开发小安派-Eyes-S1【进阶篇】——初识 LVGL 并搭建最小工程2025-01-06 1787
-
零基础开发小安派-Eyes-S1——初识LVGL并搭建最小工程2025-01-03 1751
-
零基础开发小安派-Eyes-S1 外设篇——DAC2024-12-27 1975
-
零基础开发小安派-Eyes-S1外设篇——I2S2024-12-13 2499
-
零基础开发小安派-Eyes-S1【外设篇】——FLASH2024-12-05 1448
-
零基础开发小安派-Eyes-S1 外设篇 ——I2C2024-11-27 1833
-
零基础开发小安派-Eyes-S1【外设篇】——PWM2024-11-06 1125
-
零基础开发小安派-Eyes-S1外设篇——GPIO中断编程2024-10-29 1776
-
小安派-Eyes-S1外设接口简介2023-09-18 1762
-
零基础开发安信可小安派-Eyes-S1【入门篇】——初识小安派-Eyes-S12023-09-08 1371
-
小安派-Eyes-S1/S2多功能开发板简介2023-06-19 1918
全部0条评论

快来发表一下你的评论吧 !
