

DIY交互式智能机器人设计方案
机器人
描述
1前言
灾害的发生往往会带来重大的财产损失并严重危害人员生命安全,如能在灾害发生的第一时间及时获得灾害现场的信息并能及时做出应对措施,便能大大减少灾害带来的损失,保障人们的生命财产安全。
本项目的主要目的是实现一个基于PIC32单片机并且可灵活配置外设的交互式智能机器人。该机器人可应用于各种灾害现场的灾情探测以及救援活动,此外,通过改变外围模块也可用于其他领域,如工业控制、环境监测、小区管理等。
2需求与功能分析
实现一个交互式智能机器人,用户能够通过PC端以无线通信的方式遥控该机器人。基本要求如下所示:
1. 当上电或用户复位后上位机程序和下位机控制器配置能够自动设置好,并正常工作;
2. 用户可在PC端随时发出指令要求下位机返回所在环境的各种传感量(如温湿度)以及所在环境的全景图像信息;
3. 用户可在PC端根据下位机传回的传感量实时显示并做出相应的应对措施;
4. 用户可在PC端根据下位机传回的全景图像信息还原现场景像,并做出相关方案,引导下位机采取应对行动(如行动路线)。
3相关技术和原理
上位机编程
采用 Visual C++ 6.0 编写。利用Visual C++ API函数和MSComm控件编写程序实现。
无线通信
无线通信采用 nRF24L01 ,是一款工作在2.4~2.5GHz 世界通用 ISM 频段的单片无线收发芯片。无线收发器包括:频率发生器、增强型 模式控制器、功率放大器、晶体振荡器、调制器、解调器。输出功率、频道选择和协议的设置可以通过 SPI 接口进行设置。
极低的电流消耗:当工作在发射模式下发射功率为 -6dBm 时电流消耗为 9.0mA,接收模式时为12.3mA 。
4系统设计与实现
系统总体框图如图1所示:
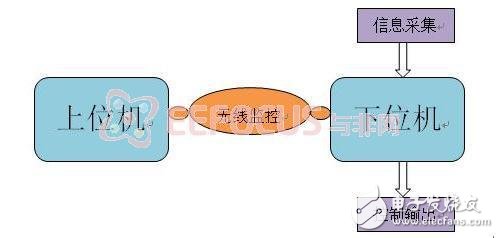
图1 系统总体结构框图
从上面的框图中我们可以清晰地了解整个硬件系统的结构以及各部分的连接。其中最重要的部分是通过无线模块实现上位机和下位机之间的通信,下位机通过接收上位机发出的指令并做出相应的动作来与用户进行交互,例如返回现场温、湿度信息以及现场全景图像信息,或者通过接收上位机发出的指令来控制相应的外设,下位机在必要时也可以自行做出应对措施,如紧急避障。更进一步可以在上位机界面恢复灾害现场全景图像,以便全方位了解灾害现场并引导机器人的行动。
上位机
下图是简化了的上位机结构框图。上位机程序由Visual C++ 编写,界面包含显示输出和控制命令输入。无线模块通过串口与PC相连。
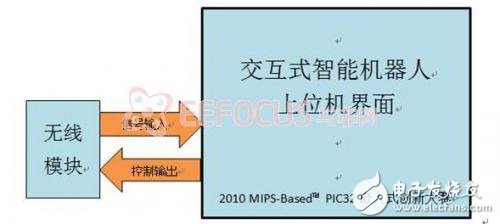
图2 上位机结构框图
下位机
本方案采用基于MIPS架构的PIC32 位单片机作为下位机的微控制器。PIC32 是一款基于高性能 32 位内核处理器 (MIPS)的芯片,并且包含很多支持工具、函数库和文档,因而很容易使用。此外,PIC32架构的微控制器经过特别设计,能够将基于8位和16位的PIC架构微处理器的应用程序方便而无缝地“移植”到PIC32架构上。
下位机结构原理框图如图2所示:
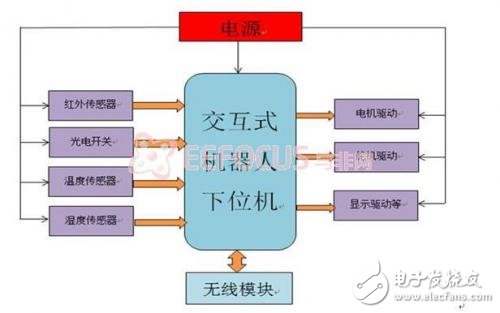
图3 下位机结构框图
无线模块
无线模块用于实现上位机与下位机之间的通信。在上位机端用于向PC传送从下位机送来的各种信息,在下位机端则用于向控制器传达PC端送来的各种指令。
传感器模块
传感器主要用于测量当前系统所处环境的各种参数,比如温湿度,烟雾浓度和人体红外辐射等。测量的数据一方面送到LCD显示;另一方面在用户请求时通过无线模块发送给上位机。
外设驱动
电机驱动用于控制机器人的行进,其中后轮由两个直流减速电机组成以提供动力,前轮则由一个步进电机控制方向;舵机驱动用于控制机械臂,做出相关操作。显示驱动用于驱动下位机LCD,以实时显示输入输出信息。
5测试
1. 当上电或复位后上位机程序和下位机控制器配置自动设置好,并正常工作;
2. 在PC端发出指令要求下位机返回所在环境的温湿度以及所在环境的全景图像信息;
3. 在PC端根据下位机传回的传感量实时显示;
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 194871
-
[分享]LabVIEW 与机器人设计2009-05-30 9173
-
altium designer 10 怎么没智能交互式布线啊2011-04-29 12117
-
自主飞行空中机器人设计方案2013-09-26 3693
-
智能机器人设计资料大全2014-06-04 167217
-
机器人设计方案,控制系统设计汇总2014-06-30 2975
-
【VEML4020近距离感应申请】基于手势识别的可交互式智能家居机器人2016-12-09 2904
-
求大神提供一个切实可行的机器人设计方案,要现在没有做出来的,实用、创新的。2017-01-06 3170
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 2178
-
智能家居—机器人保姆设计方案!2020-09-04 2858
-
辅助行走的老人智能搀扶机器人设计2020-10-12 5332
-
智能搬运机器人设计2017-01-22 1183
-
交互式机器人小车设计方案指南2017-10-16 1058
-
便携式自动割胶机器人设计方案2021-06-30 1148
-
新型手术制孔机器人设计方案2021-07-05 1099
全部0条评论

快来发表一下你的评论吧 !
