

基于单片机的老人跌倒检测装置设计
控制/MCU
描述
设计了一种基于单片机的老人跌倒检测装置,采用加速度、陀螺仪传感器采集原始信号。在进行数据融合时采用自适应互补滤波算法,从频域角度消除噪声。针对该装置设计了一种计算量小的跌倒检测算法,并且加入了GPS定位装置和GSM短信模块。实验证明该跌倒检测算法计算量小、误判率低,并且能够实现精准定位。
研究表明,老年人跌倒发生率高,后果严重,是老年人的首位伤害死因。而且跌倒的发生概率会随着年龄的增长而升高,如果能够及时救助,可有效降低跌倒老人的死亡率。
目前研究开发人体跌倒检测系统方面的技术主要有两种:图像分析法和加速度分析法。基于图像分析法,准确率高,但是检测算法繁琐,成本高,不方便携带。基于加速度分析法,不但成本低,而且不受环境的限制,功耗低,方便携带。
1系统总体设计
本设计利用六轴陀螺仪加速度计MPU6050进行原始信号的采集,采样频率为100 Hz,在进行姿态解算时,利用互补滤波器进行滤波,通过对三轴加速信号进行预处理,引入合成加速度。为了能够排除干扰,准确检测出跌倒,将姿态角和合成加速作为特征量,引入三级跌倒检测算法。一旦检测出跌倒,立即对老人的位置进行定位,同时闪光灯闪烁。等待30 s后,如果用户没有手动取消报警,则蜂鸣器发出声响,同时向目标手机和120发出报警短信。系统还设置了一键报警功能。用户的家人可以通过向本装置发送短信来获取老人的当前位置信息,防止老人走丢。
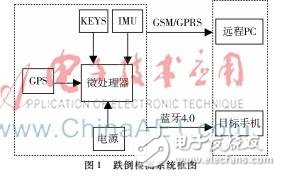
系统的硬件主要包括惯性测量单元(Inertial Measurement Unit,IMU)、GSM/GPRS模块、GPS定位模块、蓝牙4.0模块、以STM32F103ZET6为核心的控制器、电源模块、按键等。系统的结构框图如图1所示。
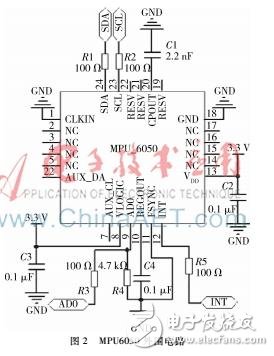
惯性测量单元选用的是InvenSense公司的MPU6050芯片,它能够同时检测三轴加速度和三轴角速度,可以输出数字量,并且传感器的测量范围是可选的。加速传感器的测量范围选择为±8 g,陀螺仪的测量范围选择为±1 000 dps,可以满足系统的要求。其外围电路如图2所示。利用芯片内部的数字运动处理器进行姿态解算,大大降低了开发的使用难度。
GPS定位模块选用UBLOX公司的NEO6M模组,该模块体积小、功耗低、搜星能力强,并且可以连接各种有源天线,非常适合应用到便携式设备中。
GSM/GPRS模块选用SIMCOM公司的工业级四频SIM800芯片,可以实现低功耗语音和数据的传输。用户可以通过AT指令进行拨叫号码、接收短信、启动GPRS网络等功能。
蓝牙4.0模块选用HM13系列的蓝牙模块,用蓝牙进行数据传输最有利的一个方面就是功耗低。低功耗蓝牙技术大幅降低了系统的功耗,只需要用硬币大小的电池即可保证系统正常运行几个月,非常适合应用在便携式设备中。
按键的主要功能是提供手动报警和手动取消报警,以降低系统的漏判和误判对用户造成的损失,同时还设置了一键报警的功能。
2跌倒检测算法
2.1特征值预处理
运动过程中加速度传感器测出的X轴、Y轴和Z轴的加速度分别为a2x、a2y和a2z。合成加速度为三轴加速度的平方和再开方。合成加速度的大小可以表征人体运动的激烈程度。
2.2姿态解算
在进行数据解算时通过对角速度积分获得人体姿态角,短时间内精度高,但是陀螺仪存在漂移误差,经过积分运算后会变成积累误差,最终导致电路饱和。相反利用加速度求解姿态角,其测量误差不会随时间的积累而增加。但是加速度传感器在人体运动时会给测量带来白噪声,短时间内精度较低。
通过上述分析可知,加速度传感器低频段动态响应较好,但是在高频段表现不好。陀螺仪动态响应好,但是存在漂移误差。所以在进行数据融合时采用自适应互补滤波算法,从频域的角度来消除噪声,发挥它们各自的优势,输出稳定可靠的姿态角。互补滤波器的原理框图如图3所示。
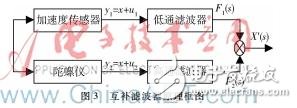
其中x为实际的姿态角,u1和u2为传感器在测量时引入的高频噪声和低频噪声。加速度传感器引入的高频噪声由低通滤波器F1(s)滤除,陀螺仪引入的低频噪声由高通滤波器F2(s)滤除。两个滤波器在频域上具有互补特性,滤波器的传递函数满足F1(s)+F2(s)=1。
2.3分类过程
通过上一小节的分析,设计了跌倒检测算法,检测参数为合成加速度和姿态角。为了了解跌倒过程中加速度变化规律,将检测装置放于腰间,测试者模仿老人跌倒,并同时记录测试者三轴加速度变化。选取测试过程中具有代表性的一组数据,用Excel进行绘图分析。如图4所示。

从图4中可以看出,当人体静止时,合成加速度在1g左右。当测试者跌倒时,其加速度先减小,然后增大,最后趋于平稳。整个过程持续了2 s左右。由此可以得到,跌倒是一个短暂的过程,这一过程测试者经历了失重、撞击和静止三种状态。
跌倒过程中合成加速度最大值在2.6g上下,且有7个连续的采样点合成加速度都在2.0g以上。并且通过对人体姿态角采样,在跌倒后至少有一个姿态角的绝对值大于45°。
用同样的方法模拟老人正常走、快步走、坐下起立、跳跃、跑步等日常活动,同时对合成加速度和姿态角进行了采样、绘图、分析,结果如表1。

通过上述分析,把连续6个采样点的合成加速度大于2.0g作为分类条件,可将跌倒与正常走等非剧烈运动区分开。同时还可以将跌倒与快步走、跑步等周期性剧烈运动区分开。为了减小误判率,可将跌倒后的类静止状态作为分类条件。最后通过判断人体的姿态,进一步减小误判率。
- 相关推荐
- 热点推荐
- 单片机
-
AI老人跌倒监测报警摄像机2024-03-25 1491
-
基于51单片机的电流检测装置设计2023-10-12 3286
-
基于STM32单片机的老人监护系统设计2023-08-28 3108
-
如何实现基于STM32单片机的老人情绪系统设计?2023-08-27 1309
-
基于STM32单片机的老人看护系统设计2022-08-08 4230
-
STM32单片机老人防跌倒报警系统GSM短信上报加速度2021-12-14 1178
-
怎样去设计基于单片机GSM老人防跌倒报警体温监测系统2021-11-19 1821
-
(毕业设计资料)基于单片机GSM老人防跌倒报警体温监测系统2021-11-12 1212
-
微波雷达感应模块,智能跌倒感应技术,为老人安全应用2021-09-02 1361
-
求一种基于STM32F103单片机的老人防跌倒报警装置GSM短信蜂鸣器报警方案2021-07-16 2136
-
跌倒报警器让你再也不必担心老人了2020-03-05 4272
-
基于单片机的老人跌倒检测装置设计的详细中文资料概述2018-06-05 1328
-
【BPI-M64试用申请】乌式粘度仪设计、老人防跌倒设计2017-04-10 1424
-
谁有基于ADxL345加速度传感器、430单片机的跌倒检测算法程...2014-05-01 3086
全部0条评论

快来发表一下你的评论吧 !
