

一种具有借鉴意义的传感器输入标定技术
MEMS/传感技术
描述
传感器获取现场信号的准确与否,直接影响到整个工业自动化系统的测量与控制精度。为了获取真实的现场信息,要对计算机系统接入模拟传感器输出的模拟量电信号进行不失真的变换。
文中提出了一种针对力和位移传感器的输入标定技术,并根据理想传感器灵敏度计算了硬件增益和通道增益,同时以软件方式进行了修正。通过工程实际验证,这种方法标定结果准确,便于操作,具有工程推广价值。
0引言
在工业自动化生产、自动控制系统、非电量电测系统中,广泛使用了种类繁多的传感器,在测量和控制过程中起着重要作用。传感器获取现场物理信号的正确与否,直接关系到整个系统的测量精度。
1传感器输入通道
本文只针对模拟传感器即输出模拟量电信号进行讨论,并不涉及有关数字传感器。
这里以力传感器(多为mV级信号)为例,首先,经多路采样开关采样,进入放大器进行直流放大,最后放大的信号被送入ADC(模拟/数字转换器),期间对快速瞬变的信号还须经采样保持处理。ADC将放大后的模拟电压信号转换成数字信号,送入计算机系统的这些数字量信息,虽代表各种物理量参数值的大小,仍须经过标度变换(工程量变换),将它转换成原来参数的真实值,以便进行显示、计算和处理。
要保证计算机系统能获取到现场真实被检测信息,保证系统的准确度,有必要采取不失真的变换方法来获取现场真实信息,对传感器输入通道的各个环节进行统一的标定。
2输入标定思想
一般情况下,位移输入没有类似力反馈的内部硬件增益。
图2所示是力、位移传感器输入标定模块图。通常位移反馈信号(LVDT或电位计式)的放大计算类似力传感器信号的放大,但是它们同样需要计算增益,并使满量程的最大最小值保持在±10V.
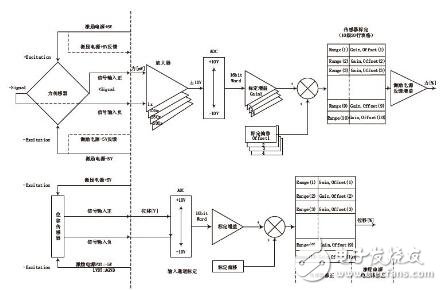
图2 位移传感器输入标定模块图
图3所示是力、位移传感器输入标定比较图。
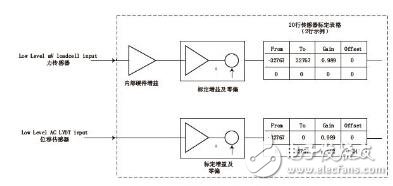
图3 位移传感器输入标定比较图
首先来研究力传感器的输入。与计算机系统连接的力传感器,是一个连接有激励电压的惠斯通电桥,它能够输出以mV为单位的反馈信号[3].这个信号的强弱与激励电压有关,如激励电压采用10 V,要由非常精确的线性电源提供(内部或独立的外置电源),力传感器最终的输出信号与在力传感器上施加的外部力成比例,这个mV级信号即计算机系统测量的力信号。
其次是确定已选力传感器灵敏度。力传感器灵敏度是由计量部门使用标准测力机检定得出的,并在力传感器检定证书中标明。例如,力传感器灵敏度为1. 979 8 mV/V.
然后是确定硬件增益。为了使ADC获得最佳的分辨率,这个mV级信号需要通过硬件增益来放大,以使信号尽可能逼近满量程的±10 V.用户确定特定力传感器所需要的一挡增益是非常简单的,如表1所列。
对于具有确定灵敏度系数的力传感器来讲,放大后的信号电压范围可采用如下公式进行计算:
放大后的信号电压=激励电压值×力传感器灵敏度×放大系数
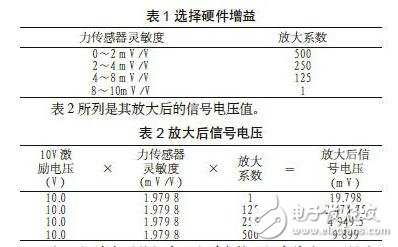
每一级放大系数都有一个对应的理想力传感器灵敏度,它是能给出最大放大效果的那一个灵敏度。例如,对于硬件增益500倍来说,对应的力传感器的理想灵敏度为2 mV/V.
任何超过2 mV/V的信号都将导致总放大后的信号超过10 V和A/D转换器输入的饱和。这将被视为信号截断,从而无法达到全量程测量。可以看到采用放大系数500时最接近10 V,表明没有信号被截断,因此它就是我们需要的最理想的放大系数。下面通过几个方面来进行说明。
-
请教一个传感器标定的问题2013-09-06 0
-
温度传感器的标定方法2016-01-11 0
-
转矩传感器标定2016-05-20 0
-
针对力和位移传感器的输入标定技术2018-11-06 0
-
基于柔性测试技术的位置传感器标定与检测系统平台的设计2018-11-14 0
-
基于差压法的一种新型液体流量传感器2009-06-22 644
-
传感器特性及其标定2009-05-19 1143
-
视觉传感器的标定技术2009-11-07 2032
-
传感器的标定2010-05-30 10374
-
一种大范围激光三角测距传感器的标定方法2017-01-02 686
-
智能汽车车载传感器标定技术深度解读2023-05-29 1514
-
深度解读智能汽车车载传感器标定技术2023-06-02 2442
-
传感器静态标定的主要步骤是什么2024-09-19 1389
-
CGQ-24霍尔传感器是一种什么类型的传感器2024-09-27 335
全部0条评论

快来发表一下你的评论吧 !
