

浅谈COT控制BuckBuck为什么是天然稳定的?稳定条件是什么?
稳压电源
描述
COT 稳压器不需要环路补偿,但是他能提供优异的瞬态性能。COT可以使用常规定频 DC-DC 系统 1/2 甚至 1/4 的小电感,输出电压 Ripple 控制。但是PART2 CCM下,COT控制的Buck为什么不稳定?本文讲解COT控制的Buck的稳定条件。
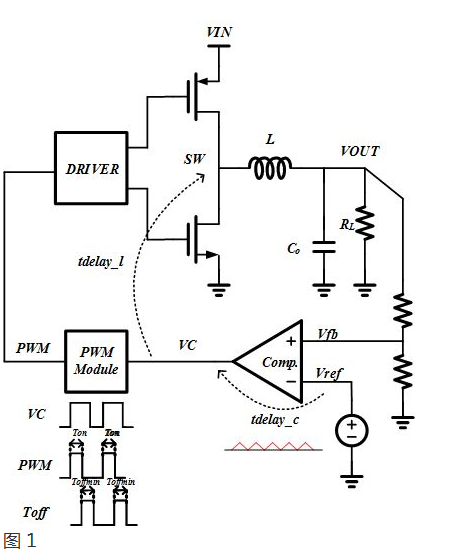
图1是COT控制的Buck的整体框图。
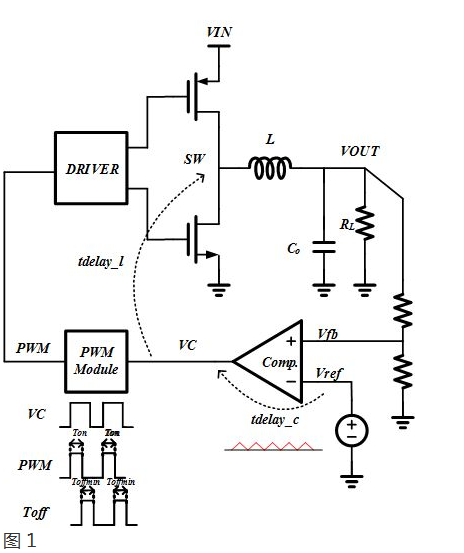
它的基本控制逻辑如图2所示。当反馈电压低于基准电压的时候,上边开关管打开,SW点变高,输出能量,让VOUT停止下降并上升;经过Ton时间之后,上边开关管关闭,下边开关管打开,SW点变低,让VOUT停止上升并下降。当VOUT下降到一定程度,即反馈电压低于基准电压,重新让SW点变高,如此循环。
这个基本控制逻辑是不完整的,SW变高Ton时间之后,如果输出不足够高,导致反馈电压仍然低于基准电压怎么办?所以需要引入一个额外的逻辑:
当上边开关管关断时(SW变高ton时间之后),如果反馈电压仍然低于基准电压,则上边功率管关断Toffmin时间之后重新打开。
事实上这个额外的逻辑并不这样做,而是:
当SW变高Ton时间之后,上边开关管强制关断Toffmin时间,Toffmin时间之后,如果反馈电压仍然低于基准电压,则上边开关管重新打开。
(大家可以对比一下两者有什么不同?)
这就是COT控制的Buck的控制逻辑。如果要跟其他控制模式进行对比的话,简单地,大家可以思考上边开关管打开和关闭的条件分别是什么就可以了。比如说定频的电压模控制的Buck,上边功率管什么时候开?时钟来的时候开(或者锯齿波快速下降的边沿);上边功率管什么时候关?反馈电压高于基准电压的时候关。
PART2 CCM下,COT控制的Buck为什么不稳定?
COT控制下的Buck不存在输出电压会飘得很高,或者直接拉低的不稳定(不会出现正反馈的情况)。COT控制下的Buck主要会存在次谐波震荡(subharmonic oscillation)的不稳定情况。
如果COT控制下的Buck不存在次谐波震荡的问题,则开关管的打开关闭完全由基本控制逻辑控制(图2),上述“额外的逻辑”并不决定上边开关管何时打开,也就是说上边功率管关断的时间肯定大于Toffmin时间。
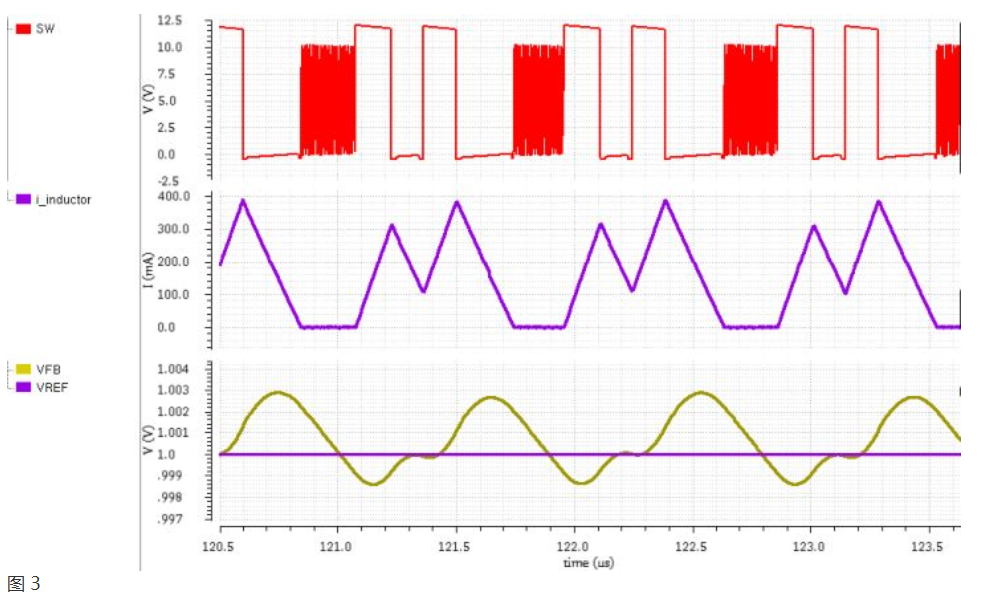
如果COT控制下的Buck存在次谐波震荡的问题,则会存在,SW变高Ton时间,变低Toffmin,再变高Ton时间,再变低Toffmin,如此几个周期之后,SW较长一段时间变低(》Toffmin时间),然后在变高Ton,再变低Toffmin,如此循环。如图3所示。
先给出结论1:CCM下的COT控制Buck如果没有任何补偿(包括电容没有ESR),且Toffmin非常非常小,几乎等于0的情况下,肯定是会出现次谐波震荡的问题。
论证逻辑是:如果不存在次谐波震荡问题,则肯定会存在一个稳定的状态。我们画出这个稳定状态,并证明它不符合控制逻辑就好了。
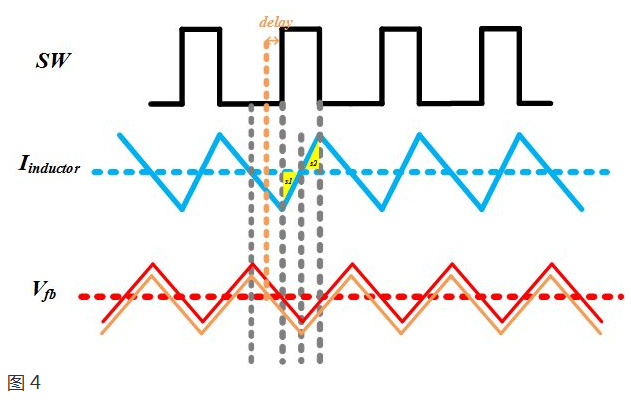
如果存在一个稳定的状态,则肯定如图4所示。最上面尾SW点的电压波形;中间尾电感电流波形,虚线为负载电流;最下面的红色波形为理想情况下的反馈电压波形,虚线为基准电压,橘黄色尾存在延迟情况下的波形。
理想情况下,反馈电压低于基准电压,SW翻高,并维持Ton时间。这段时间之内,电感电流上升,Buck输出的电容充放电电荷量恰好等于图中三角形S2的面积减去S1的面积。稳定情况下,这段时间内充放电电荷量恰好为零。这就意味着,SW翻高Ton时间之后,反馈电压恰好等于基准电压。如果存在一定的delay(如图橘黄色的波形所示),系统肯定会认为此时反馈电压仍然低于基准电压,根据COT的控制逻辑(此时假设Toffmin很小),SW会关断Toffmin时间之后再开一个Ton时间,而不会如图4般稳定输出。所以图4假设的稳定波形肯定不存在,结论得到证明。
再给出一个结论,Toffmin变大确实可以让次谐波震荡消失。(这时候再体会一下我给出的额外的逻辑的两种描述有什么区别。)
PART3 DCM下,COT控制的Buck为什么是天然稳定的?
分析方法和CCM下类似,基本上是看图说话。
先给出结论2,DCM下,如果延迟不是很大的情况下,COT控制的Buck是天然稳定的。
证明这个结论的逻辑是:先给出一个稳定的状态,证明这种状态是存在的;然后证明出现一个扰动的情况下,会回到这种状态。
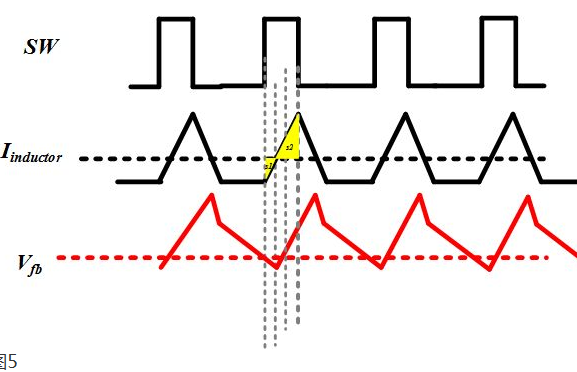
稳定状态如图5所示。DCM模式下,S2的面积肯定大于S1面积,意味着当SW维持Ton之后,反馈电压已经高于基准电压了,此时不会额外的逻辑不起作用,所以不存在次谐波震荡的问题。
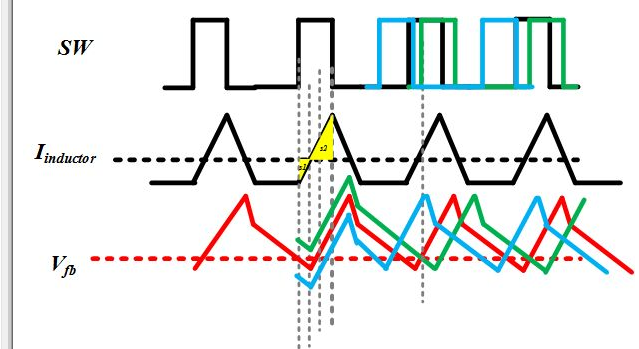
如果出现一个扰动,如图6所示。绿色线为在SW变高时刻(为了方便,随便找的一个时刻),输出出现向上扰动时的波形;蓝色线为在SW变高时刻,输出出现向下扰动时的波形。可以观察得到,对于这种扰动,都在一个周期之内就恢复到了稳定状态,这就说明了,其他状态都收敛于这个稳定态,由此证明了结论2。
PART4 DCM下,COT控制的Buck的稳定条件
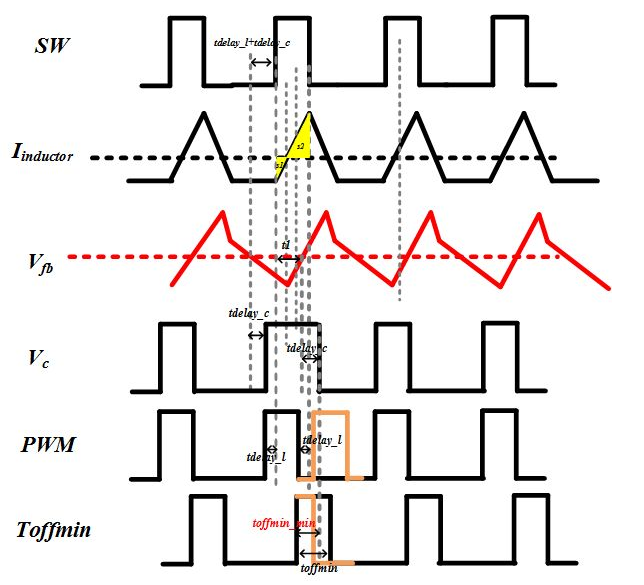
这一部分是定量的计算,没兴趣可以不看。根据图1的拓扑,PWM波的输出逻辑由PWM Module模块控制。实际输出的PWM波到SW翻转存在一个tdelay_l的延迟。tdelay_c比较器的延迟。图7是波形的分析。VC为比较器输出,PWM为PWM Module的输出。Toffmin尾PWM Module的内部控制波形。
PWM波翻高的逻辑是:Toffmin=0&Vc=1;PWM波翻低的逻辑是:翻高Ton时间之后自然翻低。
由图可知,如果toffmin小于toffmin_min,则PWM就会在变低Toffmin之后马上开启,导致次谐波震荡的发生(如图橘黄色波形所示)。因此稳定的条件是:
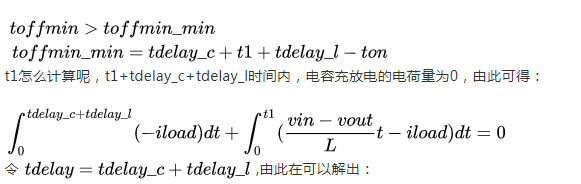
toffmin_min和tdelay之间的关系。而这就是DCM情况下,COT控制Buck的稳定条件。
-
晶闸管稳定导通的条件有哪些2025-02-01 3155
-
COT型纹波电路的稳定性分析与设计2024-09-18 663
-
COT控制模式的前世今生2023-09-17 8584
-
电子稳定系统教学视频(1)#硬声创作季学习硬声知识 2022-12-06
-
设计具有COT的稳定Fly-Buck™转换器需要考虑哪些指标2022-11-21 713
-
如何设计具有 COT 的稳定 Fly-Buck™ 转换器 - 12022-11-04 637
-
判定系统稳定性的充分必要条件是什么?2021-06-24 4605
-
COT控制模型逻辑是怎样的2021-03-11 2496
-
如何设计具有COT的稳定Fly-Buck转换器2021-01-18 2055
-
COT控制模式的详细资料说明2021-01-12 2889
-
关于COT的稳定条件的研究和介绍2019-10-10 11795
-
采用COT稳压器动态控制输出电压2018-09-19 2666
-
如何设计具有COT的稳定Fly-Buck转换器第一部分2018-09-12 2280
全部0条评论

快来发表一下你的评论吧 !
