

EtherCAT运动控制器配套用手持示教器快速入门
电子说
描述
前言
手持示教器是一种便携式操作装置,通常由外壳、内部电路板、控制面板(如按钮、旋钮、显示屏等)以及连接线等组成,用于实现特定的控制或操作功能。在机械设备中,手持示教器常用于远程控制和操作,提高工作效率和安全性。在工业自动化控制系统中,作为人机交互界面,实现复杂控制指令的输入和反馈。
正运动自主研发产品手持示教器ZHD400X和ZHD500XB,为了方便用户了解该产品,本文主要给大家介绍一下ZHD400X和ZHD500XB的硬件接口与使用。

产品简介
ZHD400X和ZHD500XB都是一款网络显示的触摸屏示教盒,示教盒必须和支持ZHMI功能的控制器配合使用。
ZHD400X手持示教盒带有24V电源,带有800*480分辨率的真彩显示屏,18个按键,配急停开关。
ZHD500XB手持示教盒带有直流24V电源,带有1024*600分辨率的真彩显示屏,16个按键,配急停开关,钥匙选择开关,外加一个可以按的手轮。
ZHD400X示教盒特性
(1)可编程示教盒,可以通过脚本程序来实现各种显示界面。
(2)绘图功能:中英文字符,直线,圆弧,图片。
(3)带急停按钮。
(4)带18个按键,按键功能可定制。
(5)RJ45水晶头(带3m连接线),U盘接口。
(6)支持HMI组态协议。
(7)适用于各种机械或机械手控制。
(8)支持触摸屏,可以按键和触摸配合使用。
(9)800*480分辨率触摸屏。

ZHD400X示教盒
ZHD500XB示教盒特性
(1)可编程示教盒,可以通过脚本程序来实现各种显示界面。
(2)绘图功能:中英文字符,直线,圆弧,图片。
(3)带急停按钮、钥匙选择开关、手轮。
(4)带16个按键,按键功能可定制。
(5)RJ45水晶头,U盘接口。
(6)支持HMI组态协议。
(7)适用于各种机械或机械手控制。
(8)支持触摸屏,可以按键和触摸配合使用,可使用触控笔,便于一些场景下更方便的操作。
(9)1024*600分辨率触摸屏。
(10)优美的外观+符合人体工程学的外形设计,有效提升操作员的舒适感。

ZHD500XB示教盒
ZHD400X和ZHD500XB是开放式的带触摸屏的可编程示教盒,通过RTSys软件和RTBasic和RTHmi语法来开发界面程序,具有友好的用户界面,支持图形化显示和直观的操作方式。操作人员可以通过示教盒的显示屏查看机器人的运行状态、报错信息等,并通过按键或触摸屏等方式与机器人进行交互,可以在线跟踪调试,简单易用。
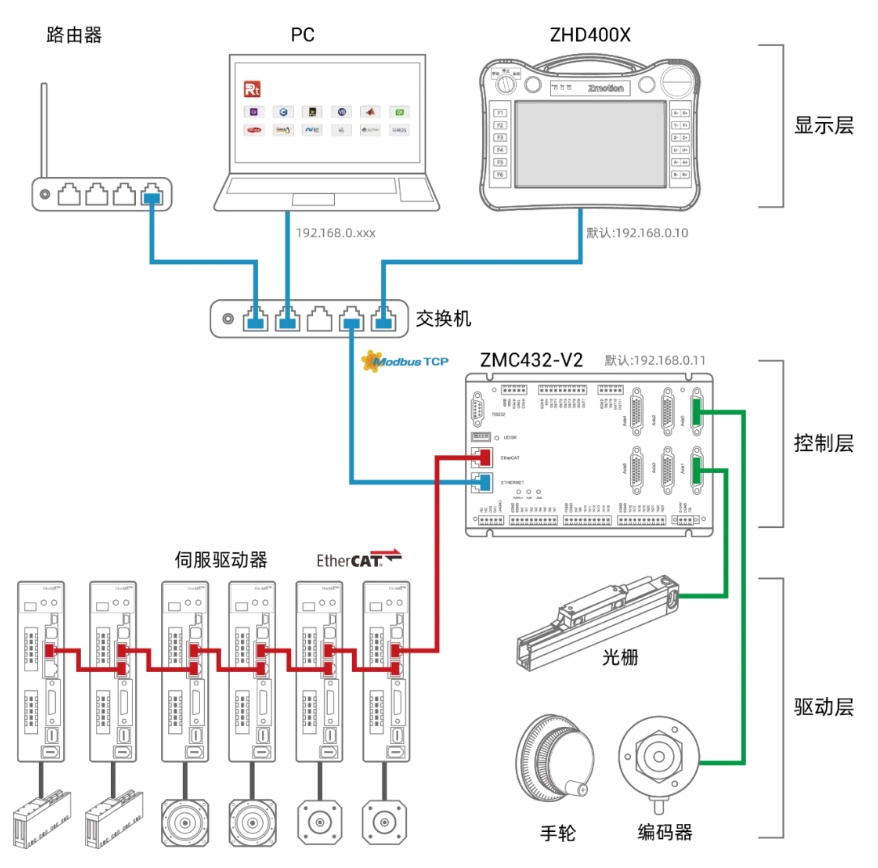
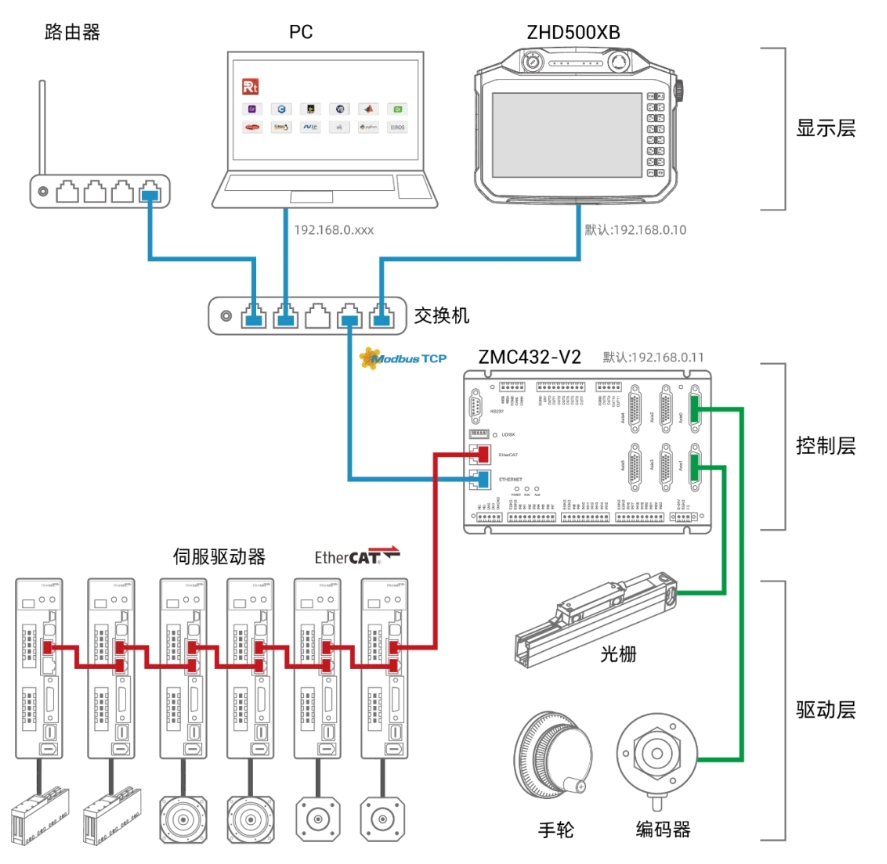
ZHD400X系统配置
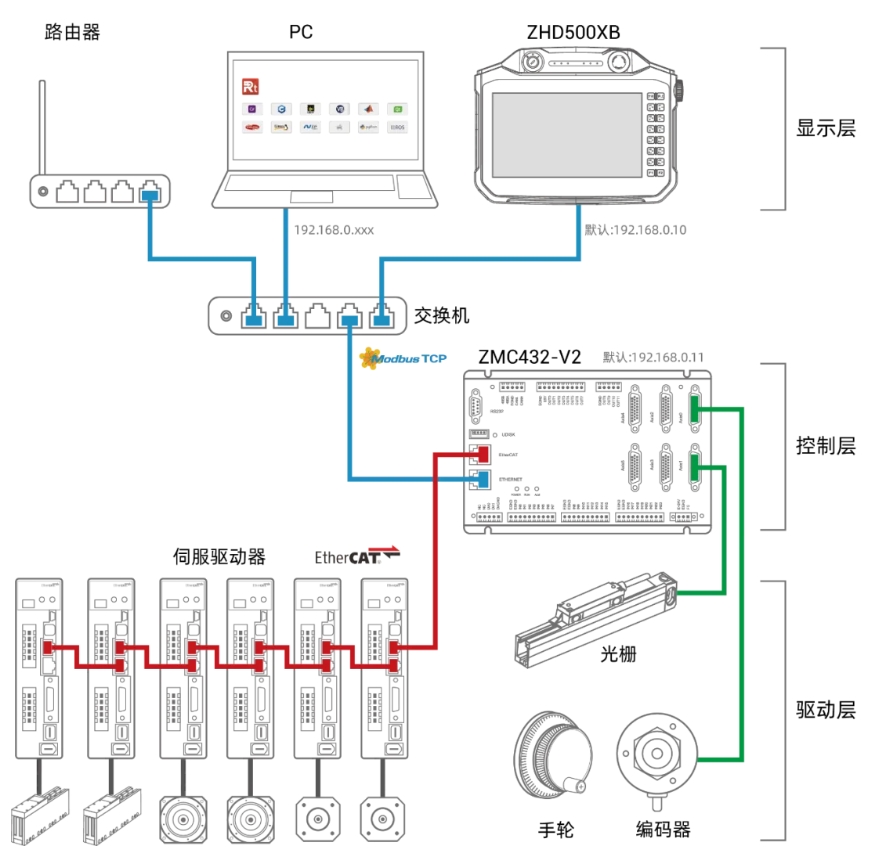
ZHD500XB系统配置
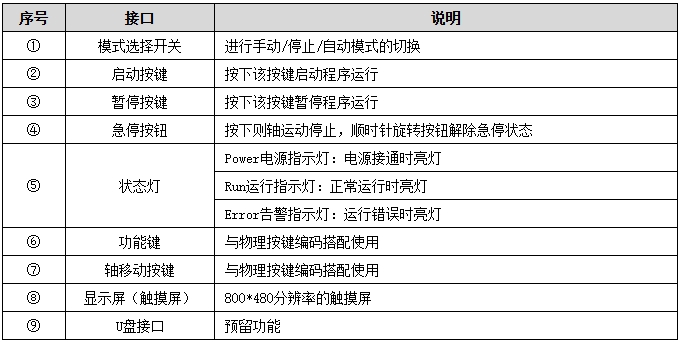
ZHD400X接口定义
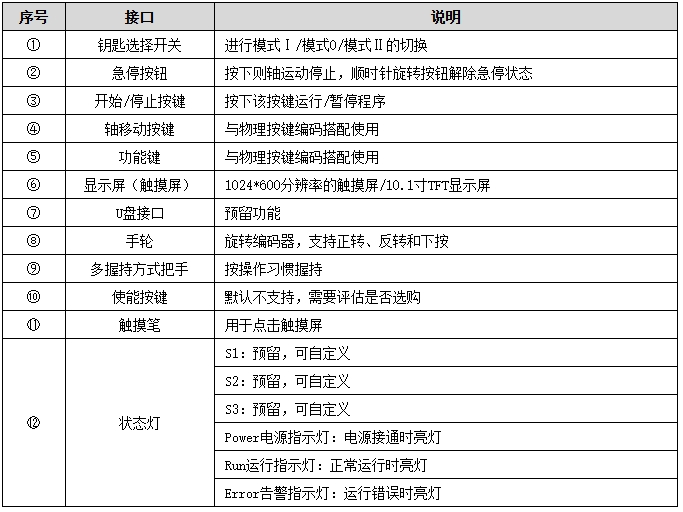
ZHD500XB接口定义
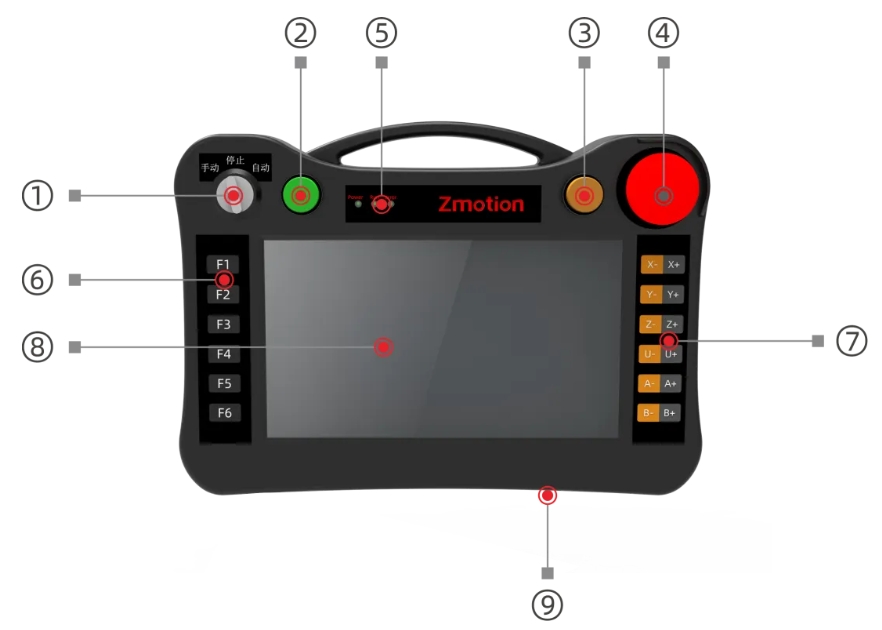
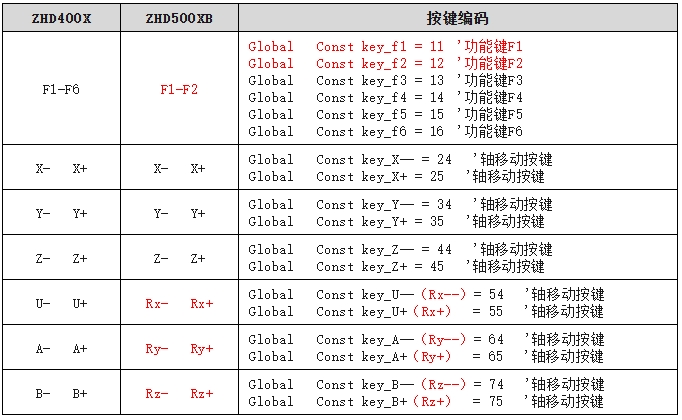
物理按键
ZHD400X带18个按键,ZHD500XB带16个按键,需要配合物理按键编码使用,按键功能可定制。按键的编码按行列组合而成。
按键按下时,示教盒自动向控制器发送物理按键,控制器程序可以检测到物理按键,如果需要使用虚拟按键,需要在组态里面使用按键转换表。具体使用可参考《RTHmi编程手册》。
1.模式选择开关

2.启动(开始)/暂停(停止)/急停按键

3.手轮ZHD500XB支持手轮,使用手轮时,Atype设置为24(远程编码器轴类型)。需要控制器5系列20180404以上固件版本支持。

4.使能按键(ZHD500XB选购)

5.面板按键
使用操作
1.接通电源
ZHD400X/ZHD500XB连接线网线一端的水晶头边上引出红色线接DC24V正极,黑色线接DC24V负极即可。

2.触摸校正
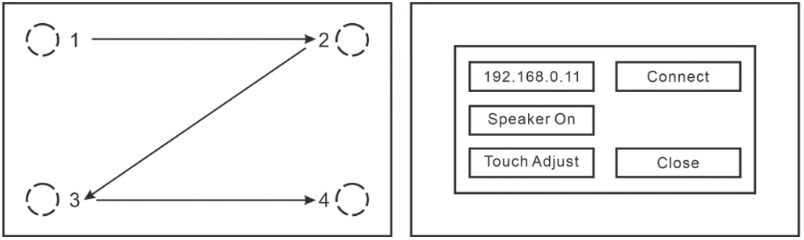
(1)方式1:通过左上,右上,左下,右下,左上,右上,左下,右下的“Z字形”方式连续点击,直至弹出设置窗口来唤醒屏幕,如下图,可进行触摸校正(Touch Adjust),控制器IP修改,喇叭(Speaker On)操作等。
(2)方式2:连接RTSys/ZDevelop后,通过TOUCH_ADJUST指令来触发校正。
(3)方式3:未连接RTSys/ZDevelop时,ZHD400X按下16(F6)按键,不松开时继续按下11(F1)按键;ZHD500XB按下11(F1)按键,不松开时继续按下12(F2)按键。
遵照显示屏上的英文指引(Touch crosshair to calibrate),追踪屏幕上的“十字”图标并依次点击操作即可。
3.连接控制器/仿真器
注:若使用方法一时示教盒扫描不到控制器IP,参考方法二。
教学视频可点击→“示教盒直连控制器,在示教盒刷新识别控制器IP”查看。
方法1:示教盒直连控制器,在示教盒刷新识别控制器IP
1.控制器与PC使用网口/串口连接,使用RTSys/ZDevelop软件将程序下载到ROM中掉电保存,程序下载成功后可以断开控制器与PC的连接。
2.用网线将示教盒和控制器连接,当使用网口通讯时,需确认示教盒与控制器IP在同一网段上。若两者不在同一网段,可通过修改控制器IP实现。控制器默认IP为192.168.0.11,示教盒默认IP为192.168.0.10。
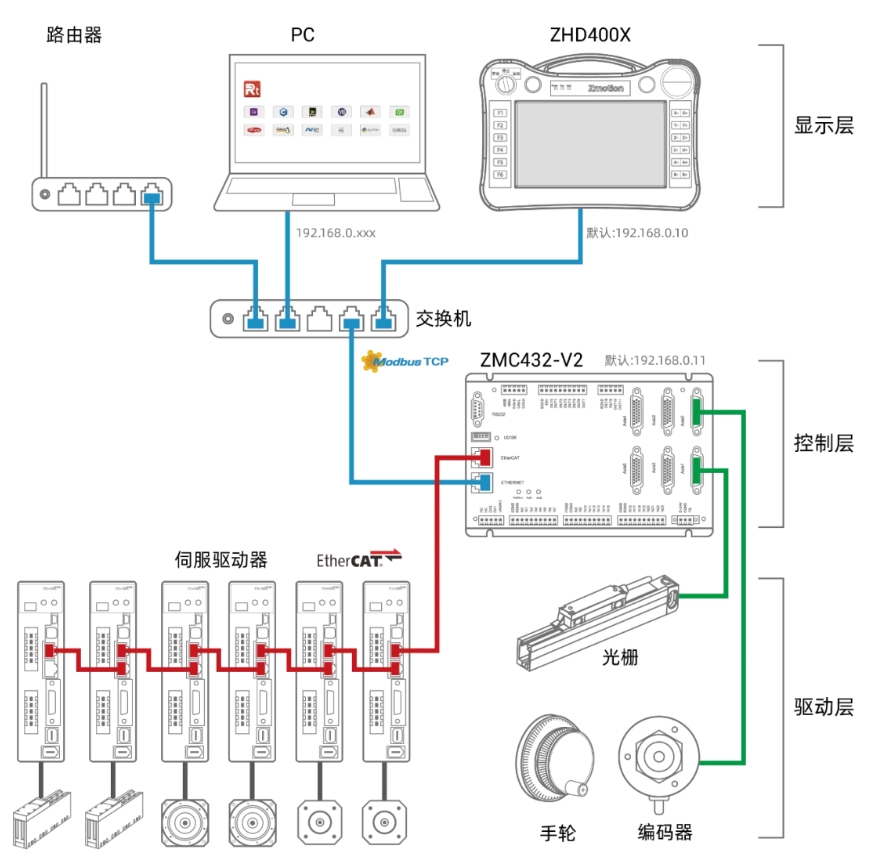
ZHD400X连接方式
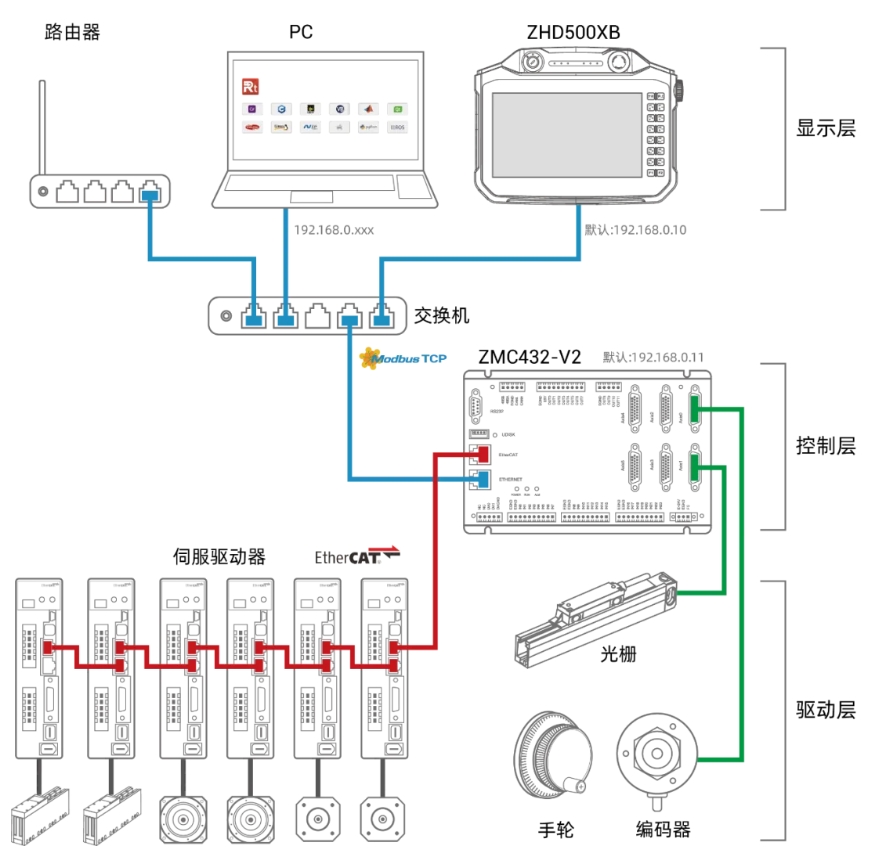
ZHD500XB连接方式
3.上电后即可在示教盒的屏上四个角,按画Z字顺序点击,连续两次,唤醒屏幕,弹出设置窗口。(可参考“触摸校正-唤醒屏幕配图”)
4.在弹出的窗口上自动获取到当前所连接的控制器IP地址,点击IP显示显示栏可以切换IP地址,确认IP无误后,点击Connect即可连接使用。
方法2:示教盒与PC连接,再进行示教盒与控制器的连接
1.使用交换机将示教盒、控制器和PC连接在一起(可参考“系统配置图”),确保三者IP地址处于同一网段。
2.控制器与RTSys/ZDevelop软件连接,将HMI程序下载到ROM中,下载成功后将控制器与RTSys/ZDevelop软件断开。
3.唤醒示教盒屏幕:在示教盒的屏上四个角,按画Z字顺序点击,连续两次,唤醒屏幕,弹出设置窗口。(可参考“触摸校正-唤醒屏幕配图”)
4.将示教盒和RTSys/ZDevelop 软件连接,连接时需保证示教盒IP和电脑IP在同一个网段。
5.在RTSys/ZDevelop软件的[在线命令]功能,发送 IP_CONNECT=控制器IP指令。发出命令后示教盒就会显示HMI界面内容,即成功实现示教盒与控制器的连接。
6.若想要实现示教盒内程序的实时更新,在第5步的基础上,断开示教盒与RTSys/ZDevelop软件的连接,将控制器与RTSys/ZDevelop软件连接,在此期间示教盒、控制器和PC三者通过交换机连接。当程序有改动时,下载程序到控制器后,示教盒即可实时更新内容。
使用RTSys/ZDevelop软件仿真此示教盒方法如下
方法1:RTSys打开工程后连接到仿真器,将HMI程序下载到RAM/ROM中,打开仿真器,点击“显示”,既可以显示和操作Hmi界面。
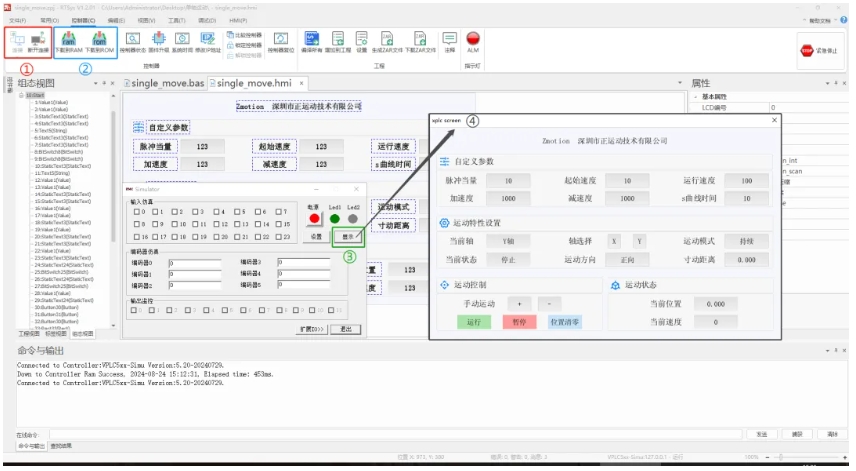
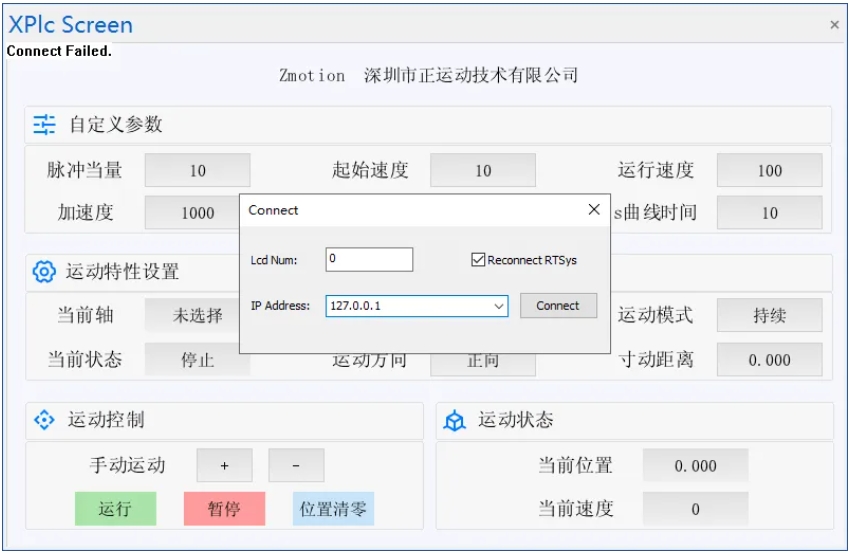
方法2:RTSys打开工程后连接到仿真器,将HMI程序下载到RAM/ROM中,在“工具”-“插件”中打开Xplc Screen,点击任一地方弹出连接界面,选择仿真器ip进行连接,连接成功后可以显示和操作Hmi界面。
教学视频可点击→"EtherCAT运动控制器配套用手持示教盒快速入门"查看。
本次,正运动技术EtherCAT运动控制器配套用手持示教器快速入门,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。
审核编辑 黄宇
-
示教盒直连控制器,在示教盒刷新识别控制器IP# 运动控制器# 正运动技术# 手持示教器#正运动正运动技术 2025-11-12
-
LabVIEW运动控制(二):EtherCAT运动控制器的多轴示教加工应用(中) #正运动技术 #运动控制器正运动技术 2025-03-13
-
LabVIEW运动控制(二):EtherCAT运动控制器的多轴示教加工应用(上)#正运动技术 #运动控制器正运动技术 2025-03-04
-
EtherCAT运动控制器配套用手持示教盒快速入门 #正运动技术 #运动控制器 #示教盒 #正运动正运动技术 2024-11-05
-
CRT-通用3-6轴MF系列多功能运动控制系统示教编辑案例2023-10-21 2064
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 1989
-
正运动技术运动控制器EtherCAT总线的基础使用2021-09-27 7195
-
正运动技术运动控制器EtherCAT总线快速入门2021-09-07 2772
-
EtherCAT总线运动控制器硬件是如何进行接线的?2021-07-15 7579
-
DMC660MF六轴运动控制器的示教系统的简易说明2020-10-26 1484
-
三轴运动控制器示教系统2020-03-23 5628
全部0条评论

快来发表一下你的评论吧 !
