

友思特分享 绘制江河湖海:uEye相机助力水路航道自动3D测绘系统
电子说
描述
导读
TAPS 是德国 Fraunhofer 研究所为河道测量而设计的半自动测向系统,通过搭载两台友思特 uEye FA 工业相机 实现对海岸区域进行高效精准的三维建模和航道地图重建。
水路航道测绘的新选项
准确的航道地图是实现安全、高效航运交通的先决条件。在德国,联邦海事和水文局等机构以及私人港口运营商都有义务随时提供最新版本的航道地图。这样做的主要原因是为了避免因路线不正确或过时而造成事故。它涉及联邦水道的分类、里程、现有水闸、升降机和拦河坝、其他周边水域、地点和边界等信息。目前,测绘工作由经过培训的人员在传统船舶上进行,这必然导致大量耗费时间和金钱成本,还可能出现在某一特定位置的测量时间过长的情况,效率十分低下。
通过具有避障和交通探测功能的自主平台对水道进行半自动监测,可以优化这一过程,并在更短的时间内提供地图。Fraunhofer 光电、系统技术和图像开发研究所(IOSB),利用一个为期3年的内部研究项目,开发出了一种能够自主勘测水体的自动水面飞行器,并使用声纳进行记录。该设备通过友思特伙伴 IDS 生产的带有两台集成工业相机的光学系统对堤岸区域及其表面结构进行监控,并将所获信息整合并传输到周围环境的三维地图中。
搭载IDS相机的半自动测向系统
精确测量水体是一项具有挑战性的任务。TAPS 是Fraunhofer IOSB 为河流和湖泊设计的半自动测向系统,能够在水下和水上进行测量。该设备尺寸约为 2×1.5×1m,可沿相关水道行驶,并自动避开静止或移动的障碍物,能够以 3.7km/h 的速度执行连续20个小时的测绘任务。
为了绘制海岸区域的可视地图,TAPS 在桅杆上安装了两台 uEye 工业相机,分别面向右舷和左舷,保证视场不重叠。借由高分辨率工业相机,可以对码头岩壁等相关基础设施进行视觉检查,并根据记录的图像数据对海岸区域进行三维建模。
表面结构的 3D 模型
“我们使用自动系统进行智能图像采集,当相机对准预设的感兴趣区域时,图像记录就会开始”,Fraunhofer IOSB 自主机器人系统研究小组的摄影测量学专家 Boitumelo Ruf 说:“车辆自身的运动只用于存储从不同角度记录的图像数据,因此在内容方面具有附加值。GNSS(全球导航卫星系统,如 GPS)和 IMU(用于确定位置的惯性测量单元)数据是确定 TAPS 平台位置和方向的基础。在拍摄图像时,会使用当前的 GNSS 位置数据来丰富图像,并使用 IMU 来分配精确坐标。”
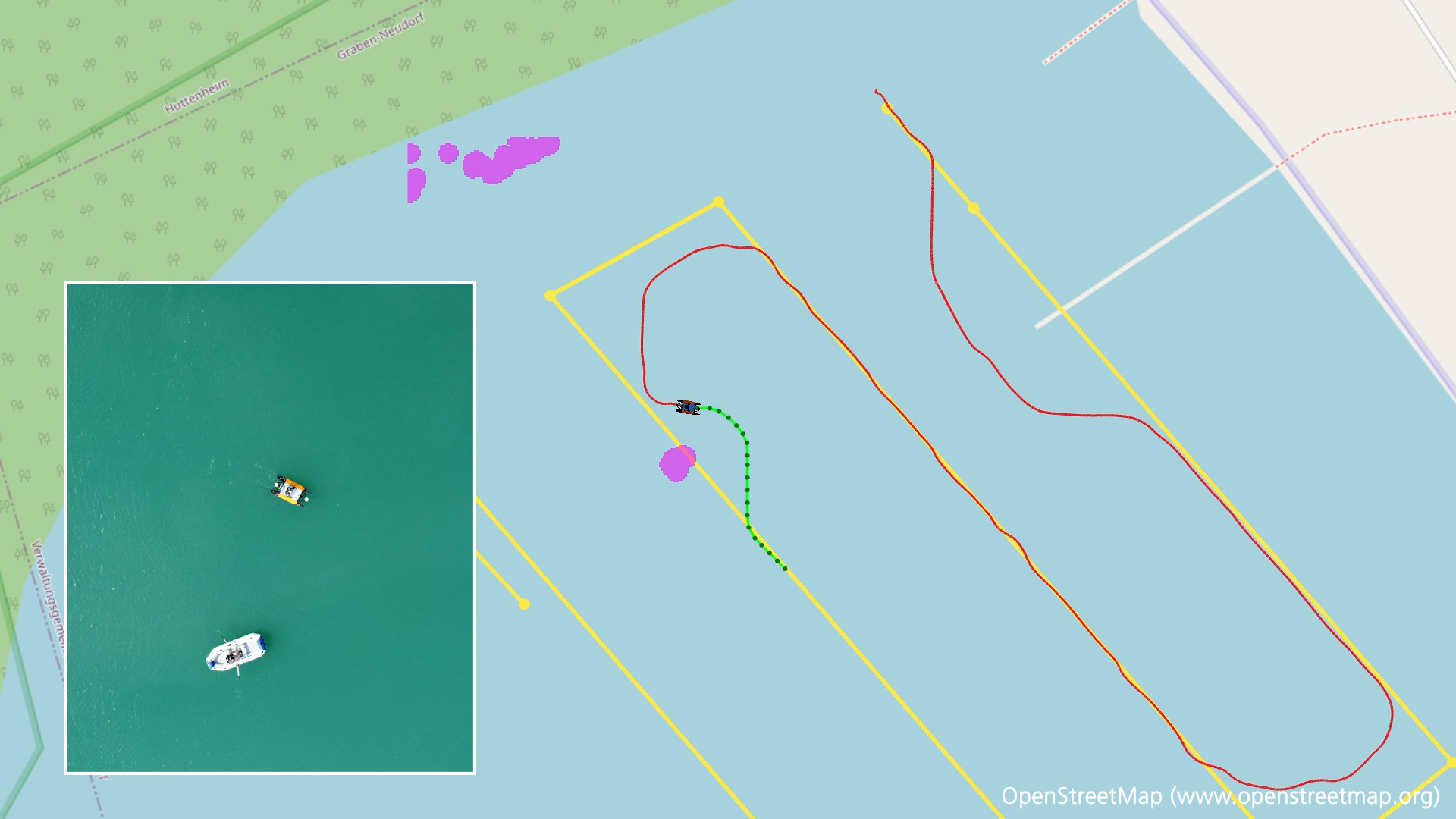 水上飞机可自动环绕充气船航行
水上飞机可自动环绕充气船航行
数据采集完成后,所记录图像与 GNSS 数据一起传送到地面控制站,在那里进行摄影测量重建。Boitumelo Ruf 详细介绍了这一程序:“除其他外,我们还使用 COLMAP 摄影测量工具箱。它利用出色的图像特征,首先对输入图像进行比较,计算出它们的相对位置,然后创建一个逼真的三维环境模型。然后,我们使用该工具逐个像素地匹配图像,即搜索对应的像素并准确合并。其结果是使用 GNSS 位置进行地理参照的密集三维点云,即提供相应的当前坐标"。生成的三维模型随后可用于如目视检查或堤岸监测等其他任务中。
坚固耐用的工业相机可抵御风雨
在相机方面,Fraunhofer 研究所使用了两台 IDS uEye FA 工业相机。带 PoE 的坚固耐用型号是苛刻环境的理想选择。相机外壳、镜筒和螺纹接头符合 IP65/67 防护等级的要求,因此具有最佳的防污、防尘和防水功能。
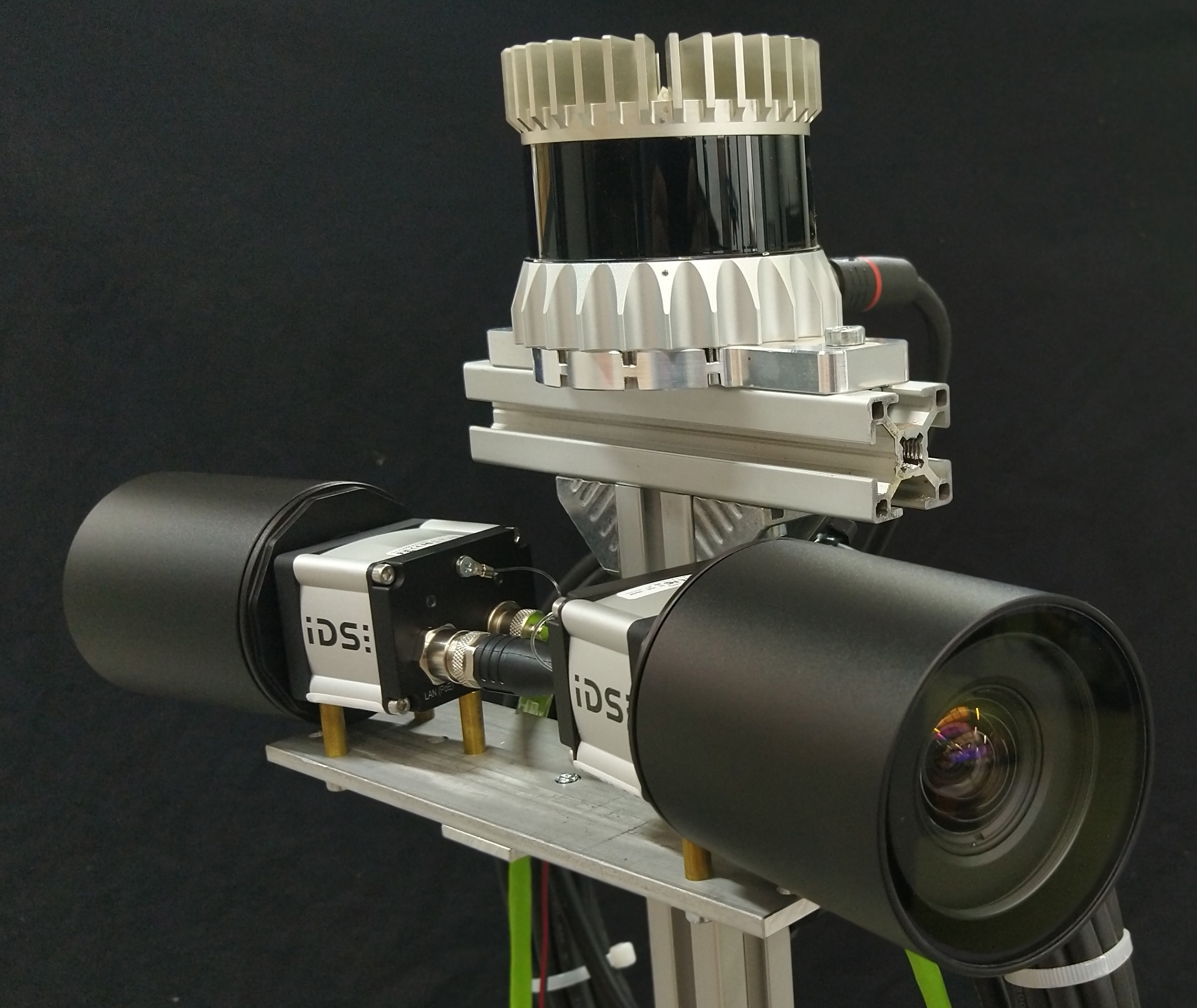 TAPS 在桅杆上安装了两台来自 IDS 的 uEye FA 工业相机,用于绘制海岸线区域的可视地图
TAPS 在桅杆上安装了两台来自 IDS 的 uEye FA 工业相机,用于绘制海岸线区域的可视地图
所使用的型号配备了索尼公司生产的 IMX304 大尺寸 1.1 英寸 CMOS 传感器,可提供分辨率为 4096 × 3000 像素的非常清晰的无噪点图像。Pregius 系列第二代像素的全局快门传感器具有出色的动态范围和极高的灵敏度,特别适用于计量等应用领域。
正是这些特点决定了 Fraunhofer 研究所对相机的选择。除了坚固耐用和不受天气影响外,对相机的重要要求还包括外形小巧和图像分辨率高,以便进行详细的目视检查。传感器还应具有较高的动态范围,以便在晴天和阴天都能捕捉到细节丰富的图像。通过标准的 GigE Vision 接口进行集成,可为配备不同摄像头的多个系统开发和使用一个驱动程序。
所使用的相机能提供非常清晰、无噪音的图像。该传感器具有出色的动态范围和极高的灵敏度。正是这些特点决定了我们对摄像机的选择。——Boitumelo Ruf,Fraunhofer IOSB 自主机器人系统研究小组摄影测量专家
TAPS 系统应用前景
除了设备的硬件需求以外,缺乏熟练工人也是水道测量的一个主要问题。水道自动测绘不仅可以降低成本,还可以减少测绘时间,以及人工测量带来的误差。
TAPS 项目的目的是为这项任务开发一个原型,并在相关场景中展示其潜力。作为一个研究机构,Fraunhofer通常会在系统的功能性和适用性已得到验证的水平上进行技术开发,而后进入与工业伙伴开展合作的阶段。Fraunhofer IOSB 自主机器人系统研究小组负责人 Janko Petereit 博士表示:"我们正在积极寻找合作伙伴,共同迈出商业化的最后一步。鉴于我们初步测试的积极结果,以及对准确、最新水道地图日益增长的需求,预计未来几年对该项目技术的需求将十分旺盛,并用于更广泛的领域。自动化水运工具可用于海上或内陆水道的人员和货物运输,还可能用于挖掘水道和自主勘测。”
该项目展示了机器人系统与数字图像处理之间互动的巨大潜力,未来,在视觉环境捕捉和场景解读方面,热门技术和应用可能会重新洗牌。
友思特IDS相机产品
uEye FA

使用PoE的高防护等级工业相机 (IP65/67),坚固耐用,防污、防尘、防溅水,内置120MB图像内存,有多样且同样坚固的周边配件,是各行业自动化应用的最佳选择。所用型号:GV-5200FA 。
客户:Fraunhofer

Fraunhofer光电技术、系统技术和图像开发研究所(IOSB)的目标是通过其在三大核心能力方面的工作,为客户做出明智决策、优化流程和智能控制自主系统提供有效支持,这也是研究所名称的由来。主要业务范围为新型视觉系统的开发,包括激光光源、传感器的最佳使用和联网,以及由此产生的数据流的处理。
了解更多?欢迎探索丰富案例:https://viewsitec.com/products/cameras/ueye/
审核编辑 黄宇
-
iDS iToF Nion 3D相机,开启高性价比3D视觉新纪元!2025-12-15 535
-
友思特分享 车载同步技术创新:多相机系统如何实现精准数据采集与实时处理?2024-10-16 1931
-
友思特分享 1小时800件?Ensenso 3D相机如何加速智能机器人的分拣效率2024-09-19 1147
-
友思特分享 IDS uEye:全球首款兼具索尼 IMX662 彩色和单色传感器的工业相机2024-07-25 2885
-
友思特应用 | 逐节测量椎骨:借助uEye工业相机进行光学脊柱和姿态分析2024-05-29 1652
-
友思特应用 | 稳步前行:基于FPGA 3D相机实现轮胎定位检测应用2024-04-24 1158
-
友思特案例 | 双目散斑3D视觉引导自动化上下料解决方案2024-03-19 1821
-
友思特分享 | 高精度彩色3D相机:开启崭新的彩色3D成像时代2024-01-11 1297
-
友思特C系列3D相机:实时3D点云图像虹科光电 2024-01-10
-
3D Flash 激光雷达测绘和手势识别2023-01-05 2448
-
3D软件中怎么绘制杯子?2021-01-28 4582
-
AD的3D模型绘制功能介绍2021-01-14 4311
-
一种基于3D打印技术的新型模具冷却水路2020-06-09 1561
-
波形绘制——3D Graph2014-12-29 7287
全部0条评论

快来发表一下你的评论吧 !
