

加速度传感器芯片有哪些_常见MEMS加速度传感器芯片盘点
电子说
描述
加速度传感器是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。
加速度传感器的特性
1、灵敏度
加速度传感器的灵敏度是指其输出信号量(电压/电荷)与输入信号量(加速度)的比值。灵敏度越高,则信噪比就越大,静电干扰和电磁干扰噪声也就越小。但是,在其它条件相同的前提下,想要得到较高的灵敏度,需要较大的质量快,这随之带来了两个缺点:加速度传感器质量变大和共振频率变低。
2、质量
加速度传感器在使用时通常是通过螺钉连接或胶黏的方法固定在被测物表面的,如果果加速度传感器的动态质量接近被测物的动态质量,则这部分质量将会影响到被测物的运动状态,从而得到有一定程度失真的测量结果。因此,当被测物较为轻薄时(电路板、壳体等),尤其应当注意选用质量小的加速度传感器。
3、谐振频率
加速度传感器本身是一个弹簧-质量-阻尼系统,因此必然有一个谐振频率,如果被测物的振动频率正好接近这个谐振频率,加速度传感器的灵敏度会急剧增加,这时输出的值是没有意义的。一般来说,加速度传感器都工作在其谐振频率的1/5或1/3的频段内。
4、频率响应
加速度传感器的频率响应通常是指其幅频响应。理想的加速度传感器的频率响应当然是从0Hz至+∞Hz都保持相同的灵敏度,但实际上并不存在这要的传感器。加速度传感器按照其工作原理不同,有些在高频段表现出色,可以达到几十kHz,有些则是低频响应较好,并可以提供直流响应。
5、横向灵敏度
在理想情况下,若被测物存在垂直于加速度传感器测量轴的方向的振动,输出的测量信号应该是为零的。但实际上,由于材料特性及制造误差等原因,可能会有高达5%的输出信号。这是一种串扰输出,因此横向灵敏度也被称为“串扰灵敏度”。
6、温度灵敏度
加速度传感器是一种电子产品,它的输出特性不可避免的会受到温度的影响,一般说来,温度越高,测量误差就越大,但可进行温度补偿。不同类型的加速度传感器的适用温度范围差别很大,如PE传感器可以耐受到700℃,而IEPE传感器由于内置了处理电路,一般只能耐受到175℃。
7、瞬变温度灵敏度
加速度传感器随着温度的瞬变将会产生输出,该输出的最大值与传感器灵敏度和温度改变量乘积的比值称为瞬变温度灵敏度。这种瞬变温度所引入的误差主要出现在压电式加速度传感器中,由热释电效应引起。大多数情况下这种效应是很低频的,且不易被发现。
加速度传感器工作原理
加速度传感器自然是对自身器件的加速度进行检测。其自身的物理实现方式咱们就不去展开了,可以想象芯片内部有一个真空区域,感应器件即处于该区域,其通过惯性力作用引起电压变化,并通过内部的ADC给出量化数值。
Lis3dh是三轴加速度传感器,因此其能检测X、Y、Z的加速度数据,如下图:
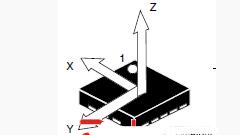
在静止的状态下,传感器一定会在一个方向重力的作用,因此有一个轴的数据是1g(即9.8米/秒的二次)。在实际的应用中,我们并不使用跟9.8相关的计算方法,而是以1g作为标准加速度单位,或者使用1/1000g,即mg。既然是ADC转换,那么肯定会有量程和精度的概念。在量程方面,Lis3dh支持(+-)2g/4g/8g/16g四种。一般作为计步应用来说,2g是足够的,除去重力加速度1g,还能检测出1g的加速度。至于精度,那就跟其使用的寄存器位数有关了。Lis3dh使用高低两个8位(共16位)寄存器来存取一个轴的当前读数。由于有正反两个方向的加速度,所以16位数是有符号整型,实际数值是15位。以(+-)2g量程来算,精度为2g/2^15= 2000mg/32768 =0.061mg。
当以上图所示的静止状态,z轴正方向会检测出1g,X、Y轴为0.如果调转位置(如手机屏幕翻转),那总会有一个轴会检测出1g,其他轴为0,在实际的测值中,可能并不是0,而是有细微数值。
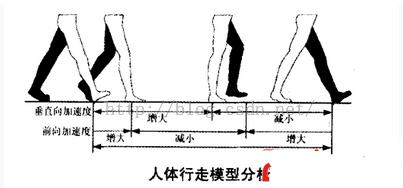
在运动过程中,x,y,z轴都会发生变化。计步运动也有其固有的数值规律,因为迈步过程也有抬脚和放脚的规律过程,如下图。“脚蹬离地是一步的开始,此时由于地面的反作用力,垂直方向加速度开始增大,当脚达到最高位置时,垂直方向加速度达到最大;然后脚向下运动,垂直加速度开始减小,直到脚着地,垂直加速度减到最小值。接着下一步迈步。前向加速度由脚与地面的摩擦力产生,双脚触地时增大,一脚离地时减小。”[此处引用韩文正等人发表的《基于加速度传感器LIS3DH的计步器设计》]。
加速度传感器应用
1、静止时进行运动检测
使用OR电路工作方式,设置一个较小的运动阈值,只检测X,Y轴数据是否超过该阈值(Z轴这时有1g,咱不管这个轴了)即可。只要X,Y任一轴数据超过阈值一定时间即认为设备处于wakeup状态了。
2、失重检测
失重时Z轴的加速度和重力加速度抵消,在短时间内会为0,而且X,Y轴没有变化,因此在短时间内三者都为0。这里使用AND电路工作方式,设置一个较小的运动阈值,当三个方向的数据都小于阈值一定时间时即认为是失重。
3、位置姿势识别
例如手机翻转等应用场景就是利用这个特性。这里在第三部分讲解工作原理时已经讲得很清楚了。
有了以上理解,以后在使用LIS3DH时直接找寄存器填数值就可以完成功能啦。
常见MEMS加速度传感器芯片盘点
MMA7260,飞思卡尔的,灵敏度6g(200mV/g)、4g(300mV/g)、2g(600mV/g)、1.5g(800mV/g)可调,最常用的3轴加速度计。噪音很恐怖,慎用。
ADXL335,AD的,灵敏度3g(300mV/g),但噪音很小,12位采样的话噪音也就正负1LSB。
以上两个加速度计我都用过。个人认为最好能选用噪音小的,灵敏度小可以放大,噪音大可就不好处理了。当然也可以RC低通滤波,但噪音是全频率白噪声,RC滤波低通频率太低的话的话会降低响应速度。
另外还有MMA7455、ADXL345,差不多可以说是以上两个的I2C、SPI数字输出版本,没有用过;还有ADXL203,噪音非常小灵敏度很高,但是是双轴的,90+RMB一颗。
需要以上几个芯片的DATASHEET的话,用英文版google搜型号一般第一个带[PDF]字样的搜索结果就是相应DATASHEET。
- 相关推荐
- 加速度传感器
-
加速度传感器原理2018-11-09 0
-
MEMS加速度传感器在电机健康状态监测上的应用2020-04-23 3882
-
加速度传感器应用详解2018-11-07 0
-
加速度传感器的原理2018-11-08 0
-
加速度传感器是什么2019-03-15 0
-
加速度传感器介绍2019-05-15 0
-
加速度传感器原理与应用简介2009-11-25 3656
-
什么是加速度传感器2010-04-01 1892
-
加速度传感器的应用详解2016-11-15 1921
-
高过载三维MEMS加速度传感器敏感芯片设计仿真与优化2016-12-17 742
-
基于MEMS加速度传感器的无手鼠标2017-03-19 888
-
加速度传感器的分类和原理是怎样的?该如何正确选择加速度传感器?2018-07-10 7117
-
三轴加速度传感器原理_三轴加速度传感器应用2019-10-17 19077
-
加速度传感器有哪几种,加速度传感器如何选择参数2023-07-25 7215
-
加速度传感器原理及其应用2024-01-05 1761
全部0条评论

快来发表一下你的评论吧 !
