

一种提升无人机小物体跟踪精度的方法
描述
来源:3D视觉工坊
0.这篇文章干了啥?
这篇文章提出了一种新颖的目标跟踪方法SFTrack,针对无人机(UAV)视频中的独特挑战,采用了三种简单有效的策略,尤其是在处理低置信度检测、小规模物体和无人机运动方面表现出色。通过在VisDrone2019、UAVDT和MOT17等多个广泛认可的数据集上进行评估,SFTrack在多个指标上显著超越了现有的先进方法。此外,文章还对UAVDT数据集的注释错误进行了识别和修正,提供了一个增强版本的数据集,以便于更准确的基准测试。整体而言,SFTrack展现了在复杂环境中提高目标跟踪精度的强大能力。
2. 摘要
本文研究了无人机(UAV)视频中的多目标跟踪问题,这在交通监控系统、警方实时追踪嫌疑人等无人机应用中具有关键作用。然而,由于无人机的快速运动以及高空和广角视角下目标物体的尺寸较小,此任务极具挑战性。为了解决这些问题,我们提出了一种简单却更有效的方法,相较于以往的工作更加高效。我们的方法引入了一种新的跟踪策略,从无人机应用场景中常见的低置信度检测结果开始跟踪目标物体。此外,我们建议重新审视基于外观的传统匹配算法,以改善低置信度检测的关联效果。为了评估我们方法的有效性,我们在两个无人机特定数据集(VisDrone2019、UAVDT)以及一个通用目标跟踪数据集(MOT17)上进行了基准测试。结果表明,我们的方法优于当前的先进方法,突显了其在多样化跟踪环境中的鲁棒性和适应性。此外,我们对UAVDT数据集的标注进行了改进,纠正了原始标注中的一些错误和遗漏之处。我们将提供该数据集的改进版本,以便为该领域的基准测试提供更好的支持。
3. 效果展示
低空视频跟踪结果对比。(a)没有运动补偿(MC)的ByteTrack无法保持轨迹。(b)BoTSORT的MC会导致边界框变形。(c)SFTrack与无人机MC,确保一致和准确的跟踪。推荐课程:零基础入门四旋翼建模与控制(MATLAB仿真)[理论+实战]。
这张图片提供了原始无人机和我们改进的无人机注释的比较可视化。原始注释中与实际对象不对应的错误将以“红色”突出显示。“黄色”标记代表我们对Refined UAVDT数据集中可见对象的附加注释。
4. 主要贡献
我们提出了一种适用于无人机多目标跟踪的方案,能够有效应对无人机固有的挑战,包括快速且不规则的运动、小尺度物体和遮挡等问题。
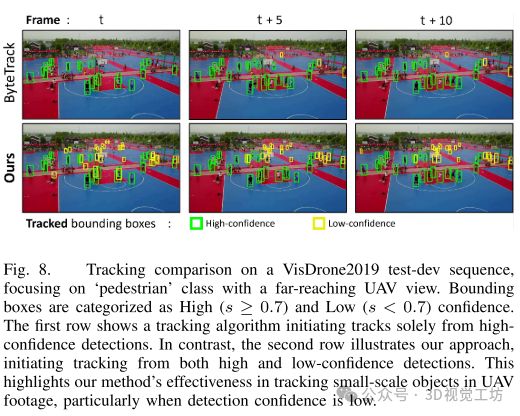
我们引入了一种从低置信度检测开始跟踪的新策略,在无人机场景中尤其有效。为管理这些低置信度检测,我们建议重新审视基于手工设计特征的传统外观匹配算法。
我们在多个数据集上对我们的方法进行了全面评估,包括VisDrone2019、UAVDT和MOT17,展示了其有效性和卓越的性能。
我们识别并修正了UAVDT数据集中缺失和错误的标注,贡献了更准确的评估并促进了进一步研究。
5. 基本原理是啥?
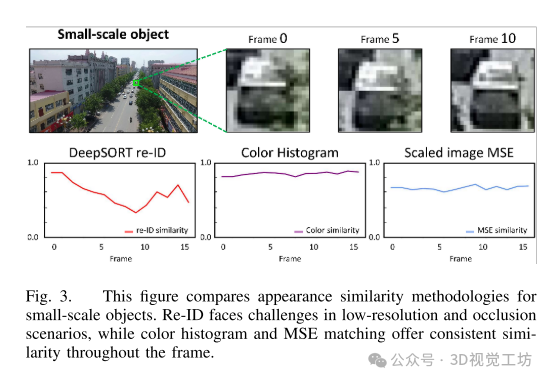
该方法的基本原理围绕三个关键策略展开,以提高无人机视频中的目标跟踪效果。这些策略主要集中在如何更好地处理小目标、低置信度检测,以及无人机运动带来的挑战。
低置信度检测的利用:传统跟踪方法通常会忽略置信度较低的检测结果,而本方法则充分利用这些低置信度检测,以避免遗漏小目标或快速移动的物体。通过引入低置信度检测,能有效减少漏检,提高整体跟踪精度(MOTA和IDF1指标)。
自适应关联策略:为了应对无人机在飞行过程中可能遇到的复杂视角变化和快速移动,本方法结合了基于传统外观特征的匹配算法,适用于频繁出现低置信度检测的情况。这种方法在连续帧之间维持较高的身份保持能力,不易因光线变化和视角偏移而丢失目标。
无人机运动补偿:由于无人机视频中的相机运动较大,本方法引入了一种专门为无人机设计的运动补偿技术(UAV Motion Compensation, UAV MC),通过保持目标的纵横比来改善运动带来的目标形变,从而提升跟踪的稳定性。
这三种策略的结合,使得该方法在无人机特定场景下表现出色,特别是在跟踪小目标和快速运动物体时,能提供更加平衡和可靠的跟踪表现。
6. 实验结果
实验结果表明,本文提出的SFTrack方法在多个基准数据集上显著优于现有方法,尤其是在无人机(UAV)数据集上的表现更加突出。
与现有方法的对比
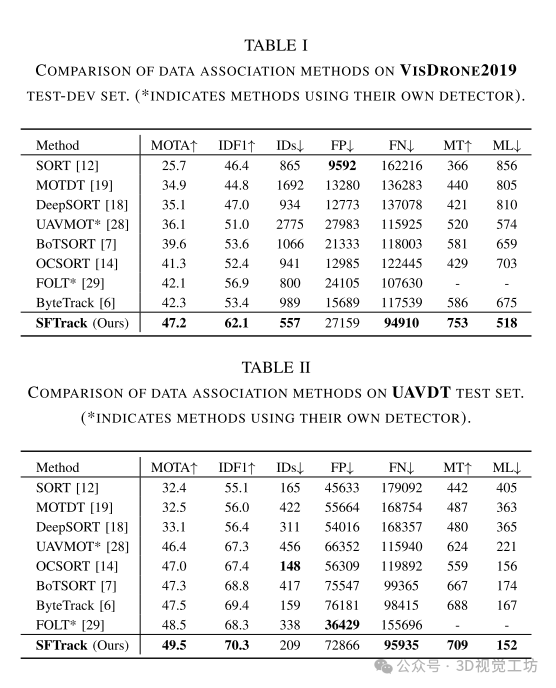
VisDrone2019和UAVDT数据集:在这些无人机数据集中,SFTrack在大多数评估指标上都优于其他方法。例如,与表现最好的ByteTrack相比,SFTrack的多目标跟踪准确率(MOTA)提高了4.9%;与在IDF1指标上表现最好的FOLT相比,SFTrack的IDF1分数提升了5.2%。这证明SFTrack在跟踪准确度和身份保持方面的表现优越。
MOTA与IDF1的权衡:尽管SFTrack在降低漏检(FN)上表现优异,但也带来了一定的误检(FP)增加。这种权衡来自于SFTrack方法中低置信度检测的使用和传统外观匹配算法的应用。然而,与其他先进方法相比,SFTrack的跟踪表现更加平衡,尤其在无人机场景中,保证目标不被漏检往往比短暂误检更为关键。
困难场景测试
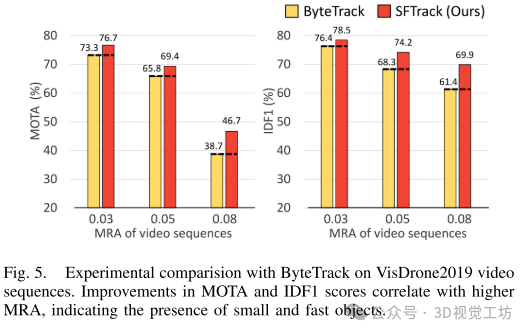
小目标和快速移动物体:在VisDrone2019数据集中,SFTrack在包含大量小目标和快速移动物体的视频中表现尤为出色。具体而言,SFTrack在平均相对加速度(Mean Relative Acceleration,MRA)较高的场景中展示了显著的性能提升,能够更好地应对快速移动的物体。
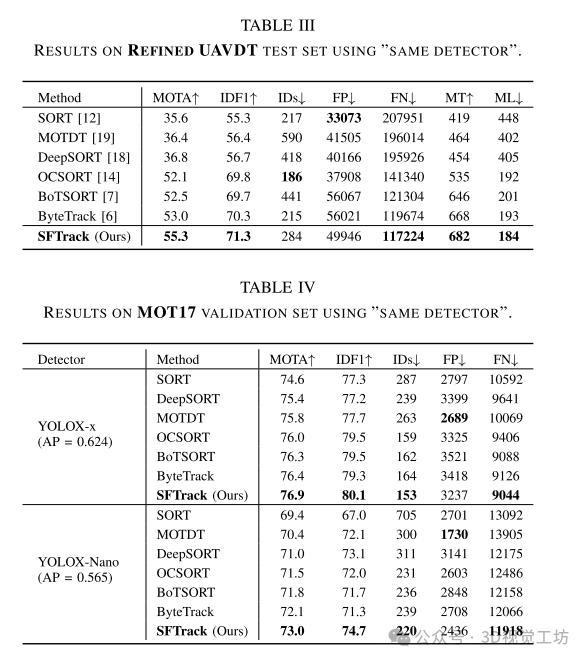
高海拔和视角变化的场景:在Refined UAVDT数据集上,SFTrack在高空飞行(70米以上)和视角频繁变化的条件下,超过了次优方法,展示了更强的鲁棒性和适应性。
MOT17数据集评估
在MOT17(非无人机)数据集上,SFTrack同样表现出色。特别是在不同检测器(YOLOX和YOLOX Nano)的应用下,SFTrack在低置信度检测频繁的情况下仍能有效工作。尤其是在使用性能较低的YOLOX Nano时,SFTrack能够有效处理检测性能下降带来的更多低置信度检测。
消融实验
通过消融实验,研究了SFTrack中各个组件的影响,验证了每个模块的改进效果:
无人机运动补偿(UAV MC):用保持纵横比的无人机运动补偿方法替换BoTSORT的运动补偿技术后,MOTA提升了1.4%,IDF1提升了3.7%。
低置信度检测的初始化:增加了低置信度检测的初始化,使MOTA和IDF1分别提高了3.2%。
外观匹配策略:使用传统外观匹配算法后,MOTA和IDF1分别又增加了1.7%和0.2%。
尽管这些改进对跟踪速度有轻微影响,SFTrack依然可以达到每秒10帧的跟踪速度,尤其在后续优化(如C语言实现)中,速度有望进一步提升。
7. 总结 & 未来工作
在本研究中,我们提出了一种新颖的关联方法,通过三个简单而有效的策略来进行目标跟踪,重点解决无人机视频中的独特挑战。我们的方法针对低置信度检测提出的策略,能够有效地应对小尺度目标的跟踪以及无人机运动的管理。在多个基准上,我们的方法优于现有的主流方法,并在VisDrone2019、UAVDT和MOT17等广泛认可的数据集上进行了验证。此外,我们还识别并修正了UAVDT数据集中现有的标注错误。增强版的数据集将公开发布,为该领域提供更为准确的基准资源。
-
使用高精度IMU对无人机系统有何提升?2025-07-21 1141
-
知语云:低慢小无人机如何反制管制监测行为?方式方法又是什么?2023-11-20 4087
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 28993
-
各类反无人机技术的优势2022-08-25 28027
-
【飞控开发基础教程4】开源编队无人机-串口(光流数据获取)2022-07-13 2684
-
分享一种无人机开发的基础技能体系2021-11-22 1469
-
一个基于树莓派和Python的无人机视觉跟踪系统 精选资料分享2021-08-09 1674
-
怎样去构建一种基于PC104无人机的视频系统?2021-06-07 1809
-
无人机+探地雷达=地雷探测器?2018-10-22 4208
-
一种无人机三维航路自适应跟踪控制2017-12-13 1379
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7491
-
无人机侦测和反制系统2017-04-05 8671
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 11729
-
一种小型无人机的导航系统方法设计2016-01-04 919
全部0条评论

快来发表一下你的评论吧 !
