

世强首推高级汽车环视辅助驾驶系统方案
汽车安全系统设计
描述
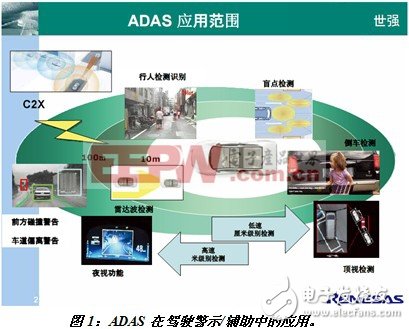
自去年Google公司的无人驾驶汽车被颁发车牌上路实测以来,人们对这项计划的热议就一直没有停止过。有业内人士表示,对于实现无人驾驶的目标,其时间节点业界定义为2025年!该目标是否能够如期实现还不好说,但与此相关的先进驾驶辅助系统ADAS技术已更多得被人们所熟知。ADAS是指利用安装于车上各式各样的传感器及摄像头,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险。
不管是谷歌激进地直接开发无人驾驶汽车,还是传统汽车制造商们增量渐进式地使汽车驾驶更加智能化,他们的目标都是为了帮助减少交通事故、降低交通拥堵浪费的时间和能源。的确,有数据显示,在各类道路交通事故中,人为失误的原因占到77%至90%。
随着各国政府和民众安全性意识及相关法规标准的推进,各种ADAS应用及传感平台的配备也已经从高端汽车向中端甚至入门级汽车车型中渗透。据IHS isuppli公司的汽车研究专题报告,2012年自适应巡航控制系统(ACC)、车道偏离警告(LDW)和侧面物体探测(SOD)等三大ADAS技术的营业收入合计将达到26.9亿美元,增长高达63%。
“ADAS技术近几年成为智能交通的热点,自然也引发中国汽车厂商的密切关注和跟进。”世强高级市场经理Tony Hu说,“特别是对于车道校正,包括LDW和车道保持辅助系统(LKAS),随着许多国家要求把LDW作为卡车、公共汽车等汽车ADAS的一项功能,欧洲车规将于2013年规定巴士必须装设车道偏移系统,美国是2014年规定纳入,中国相关法规预计也会在2016年出台。因此,市场对车道校正的需求正在上升,这种功能已成为高档轿车和SUV以及部分中档汽车的标准配置。”
作为全球领先的汽车电子半导体供应商Renesas(瑞萨)在国内最大的代理商之一,世强已联合第三方合作伙伴推出了基于瑞萨最新图像处理器SH7766的高级汽车环视辅助驾驶系统方案,受到很多客户关注。“客户对此方案评价很高,相比竞争产品方案,瑞萨走的是‘高而不贵’路线,其产品的突出优势在于图像处理能力是通过硬核引擎实现,处理速度较DSP方式(软件算法)会更快,性能也会有明显提升。”Tony指出。
图像处理优势是驾驶警示/辅助ADAS的成功关键
ADAS应用一般分为两个层次:其一为视觉辅助系统,包含倒车显影功能等;第二中为驾驶警示/辅助系统,涵盖车道偏移系统等。对于前者,视觉辅助系统图像处理器仅须具备影像校正和显示功能,而对于驾驶警示/辅助系统则要能进行影像辨识,技术难度更高一个级别。
对于中高端的驾驶警示/辅助ADAS系统,显示应用的价值日益突出,可帮助驾驶员在停车时用于监视车辆周边环境,特别是后视监视器和俯视系统正日渐普及,此外,影像辨识系统也趋向多样化,除了车道辨识功能之外,还包括同时辨识多个对象,例如信号灯与标示、行人及汽车等,因此对影像辨识引擎的要求也越来越高,必须能够同时执行多项处理作业。而如果要处理不同的辨识算法,以识别各种具有不同形状与方向的对象,例如行人,就需要采用结合CPU与专业IP的有效架构。
Tony分析道,尽管目前几家国际领先半导体厂商都在推广相应的图像处理芯片方案,但在汽车电子领域深耕多年的瑞萨有其独特的优势,特别是在图像处理的性能和实时性方面,如世强正在中国市场帮助大力推广的图像识别SoC SH7766,就集成了支持视点转换引擎和动态范围控制等全新视图功能的硬件引擎,相比DSP和软件算法方式就更有优势了。
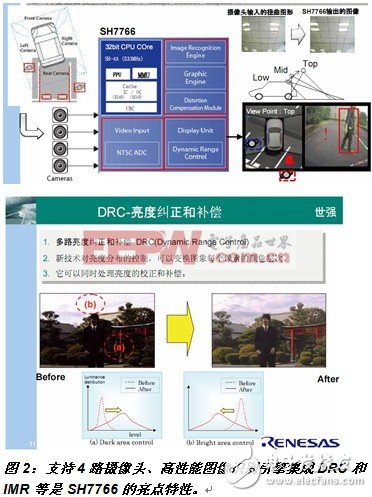
SH7766 SoC在与瑞萨前一代图像识别SoC——SH77650保持兼容性的同时,还提供更高的性能,强化了视点功能,并提升了图像识别引擎的性能。特别是强化了视点转换和动态范围控制(亮度补偿等)等显示功能。这些新功能可以使本产品实现更多应用,例如清晰和容易区分的俯视(top-view)虚拟摄像头可视化,可利用不同视点实时显示不断变化的周边环境,从而实现环视和周边检测的ADAS监视功能。
具体来说,SH7766如下几大图像处理优势特别引人注目:
1. 周边物体检测 (支持4路摄像头)
SH7766 SoC配备六个视频输入通道。其中,四个通道采用NTSC模数转换器(ADC)。这表示单芯片上即可提供NTSC摄像系统的必要功能。另外,还可以利用六个视频输入通道实现多个应用,使用在一枚芯片上提供的各项功能。例如在正常行驶时可利用数字双通道输入,在十字路口和停车时则切换成NTSC四通道输入。
2. 高性能图像识别引擎
SH7766 SoC配备IMP-X2新一代图像识别引擎。IMP-X2在与瑞萨现有图像处理引擎(IMP)保持数据库兼容性的同时,将处理性能提高至约四倍以上,应此使其能并行执行多个处理任务,例如跟踪车道、标志和标线、行人及车辆等。此外它还新增了多项功能,例如全景图像生成,该功能广泛使用了通过行人、车辆等判断处理的图像识别算法。通过IMP-X2与进行处理判断的同一芯片上的CPU之间的协作,在保持低功耗的同时实现了先进的图像识别性能。
3. 集成DRC, 支持亮度纠正和补偿
依托动态范围控制(DRC ,Dynamic Range Control)功能,即使是处理向阳处和背阴处这种亮度大不相同的多个视频图像,还能调整复合视频亮度,补偿过亮和过暗,以便驾驶员更清晰地看清图像显示。
4. 内置扭曲校正硬件 IMR
图像渲染器(IMR, Image Render Engine)视点转换引擎可实时制作出因视频输入或场景而异的视点俯视图像,利用三角网格校正失真的模式、自动生成矩形网格内的顶点数据,对图像进行失真校正,旋转,缩小或放大。
世强首推高级汽车环视辅助驾驶系统方案
基于SH7766,世强联合第三方设计公司开发出了一套高级汽车环视辅助驾驶系统方案(如图3所示),堪称分销界首创!这套环视ADAS系统方案具有强大的图像处理能力,能实现超清晰图像和高品质色彩还原;完美的画面明暗表现,来自高动态范围的自动调整;且只有极低的CPU占有率和功耗。此方案可以适用于汽车安全系统,如车道偏离警告系统(LDW)、车道保持辅助系统(LKAS)等典型的ADAS应用。

据Tony介绍,该环视ADAS系统方案可提供两种标定模式-全自动标定模式和精准标定模式 :
1. 全自动标定模式是强大、可靠的,并不需要相机安装角度的苛刻要求;适应大规模生产;
2. 在光照条件很差,或恶劣环境条件下,可以采用半自动精准校定工具,提供最好的标定结果。另外,该系统方案支持超级虚拟相机模式,可以生成在任意视角下的虚拟视图,且可任意使用虚拟相机参数,焦点,生成视图,鱼眼和针眼相机都适合。
世强环视ADAS方案的其他特点还包括:
1. 支持基于环视原理的车道偏离驾驶预警模式:基于环视的车道偏离技术打开了新的领域,扩展了环视驾驶辅助系统的应用;
2. 俯视图的可见区域大小一键更改 ;
3. 俯视图完美拼接和分割效果;
4.多种模块的备选(包括:3D效果的环视界面;DVR ;基于3G的视频查看和信息管理;语音倒车指南等)。

-
什么是高级驾驶辅助系统:ADAS 概述2023-07-25 2594
-
高级驾驶员辅助系统(ADAS)解决方案2022-11-14 1477
-
卡车高级驾驶辅助系统 (ADAS) 解决方案 -飞凌嵌入式2021-10-27 3794
-
求大佬分享一个MAX9286+MAX96705高级辅助驾驶系统ADAS方案2021-10-11 2065
-
ADI、瑞萨电子等知名芯片厂商的ADAS经典解决方案合集2020-06-02 4527
-
AutoVision成像解决方案怎么助力辅助驾驶系统应用?2019-08-16 1935
-
探析汽车高级驾驶辅助系统ADAS2018-12-14 4942
-
浅谈汽车高级驾驶辅助系统ADAS2018-12-10 5971
-
AMEYA360设计方案丨汽车后视安全辅助系统解决方案2018-07-26 2661
-
我想做汽车辅助驾驶ADAS系统,求方案2017-09-12 4564
-
高级驾驶辅助系统(ADAS)汽车环视技术简述2016-12-29 1401
-
高级ADAS汽车环视技术浅析2016-11-09 2306
-
世强高级汽车环视辅助驾驶系统(ADAS)方案2014-11-03 3057
-
ADAS方案设计成功关键:图像处理技术2014-09-01 4356
全部0条评论

快来发表一下你的评论吧 !
