

基于PSoC4 的无刷直流电机控制系统设计及实例分析
工业控制
描述
1. 引言
Cypress在2013年推出了可编程片上系统PSoC(Programmable System on Chip)家族的最新产品PSoC4,采用ARM Cortex-M0作为处理核心。PSoC4完全继承了PSoC芯片家族本身的高度可编程的灵活性,并融合了Cortex-M0高性价比的处理器核架构,使得PSoC4系列产品成为一个具有高度可扩展性的处理器平台,在性价比、功耗等方面优势显著。更值得一提的是,PSoC4针对电机控制提供了完整和极具特色的片内资源,因此工程师在PSoC4上开发电机控制系统时将更加直观与快捷。
PSoC4产品系列目前推出的是CY8C4100和CY8C4200两个入门级产品系列。本文即以CY8C4200为例,介绍如何在PSoC4上开发有传感器的三相无刷直流电机控制系统。
2. PSoC4架构及与电机控制相关的片内资源简介
PSoC 4是基于ARM Cortex-M0 CPU(处理器)的可编程嵌入式系统控制器家族,为嵌入式应用提供了强大的可编程平台。它集合了可编程模拟资源、可编程内部互联、用户可编程数字逻辑、通用的固定功能外设计以及高性能的ARM Cortex-M0 CPU子系统。
图1是PSoC4的系统框图。限于篇幅,本文将主要概括与无刷直流电机控制相关的片内资源特性,详细内容可以参考Cypress网站上的PSoC4的数据手册。
●高达48MHz,43 DMIPS 的32位Cortex-M0 CPU,支持单周期乘法
●多达32 KB Flash及4KB SRAM内存
●四个独立的可支持中央对齐的TCPWM,支持互补的可编程死区及同步ADC操作
●两个支持比较器模式及SAR ADC输入缓冲功能的运算放大器
●两个电流数模转换器(IDAC),可以输出给内部模块,或通过GPIO输出到外部成为可定制的用户电流源。
●四个可编程数字逻辑模块(UDB)
●一个支持零开销通道切换功能的12位1 Msps ADC
●CapSense驱动
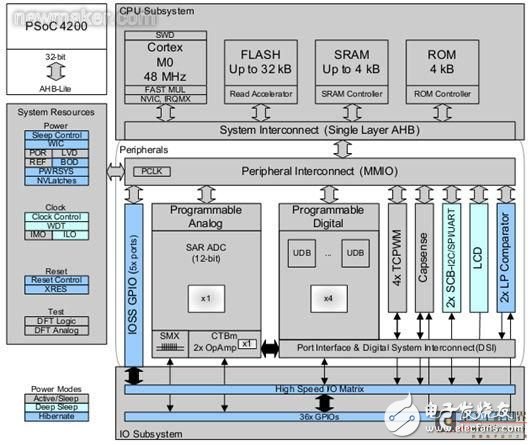
图1: PSoC4芯片系统框图
PSoC4在开发环境方面与PSoC家族的上一代产品保持一致,仍然为PSoC Creator,延续了将片内资源抽象为模块化Component的开发方法,控制系统架构清晰具体,简单快捷。用户可以更多关注产品的功能开发,而较少的注意芯片的硬件结构细节。
3. 有传感器无刷直流电机控制原理及主要商用控制方案分析
① 无刷直流电机控制原理
无刷直流(Brushless Direct Current, BLDC)电机正在汽车、家电、工业自动化、航空航天及医疗设备领域获得广泛的应用,并将继续逐步取代有刷电机。由于采用电子换相,BLDC电机具有更长的寿命和更小的运转噪音。此外,随着软磁材料技术的进一步提高和价格的不断下降,BLDC电机将更多的采用高性能的钕铁硼稀土材料制作永磁转子,其较高的磁能积和稳定的特性使BLDC电机拥有更好的机械特性和动态响应,更高的效率和转速范围。因此,在环境和性能要求比较苛刻的中高端应用中,BLDC电机将获得进一步的推广。
从电机结构原理上来说,BLDC电机定子和转子磁场具有相同的频率和转速,因此是同步电机的一种。定子绕组可绕制成单相、两相和三相,其中三相BLDC电机因输出功率大、转矩脉动小和效率高应用最广泛。本文的研究对象也将放在三相BLDC电机的控制系统上。
三相BLDC电机采用两相顺序通电模式产生旋转磁场,定子各相绕组的导通与否由转子位置唯一确定,以保证转子能够始终输出最大转矩。由于取消了自动换向的机械电刷,因此需要实时检测转子的空间位置,霍尔效应传感器因其较高的性价比和安装方便被广泛采用。对于两相导通的三相BLDC电机来说,每个电周期分成6个不同的通电区间,因此需要三个霍尔传感器来进行分区。图2为典型的霍尔传感器输出信号与相应的导通相之间的关系图,霍尔传感器的每一个变化都要求导通相的实时改变,电机即按照既定的逻辑连续顺序运行。

图2:霍尔传感器信号与相绕组导通关系图
② 无刷直流电机主要商用控制方案分析
目前各大主流半导体厂商均推出了各自的有传感器BLDC电机控制方案,技术类似,也比较成熟。概括说来,将三路霍尔传感器的输出接到MCU的输入引脚上,每一路电平的变化将会触发中断,在中断服务程序中根据图2的逻辑来查表改变相应的导通相,达到换向的目的。
图3为市场上的主流商用方案示意图,通过简单的分析我们可以发现MCU通过中断服务程序来进行换相,在对电机电流的监控上,电流信号由外部采样及运放电路送入ADC后由软件程序来比较判断是否过流并关断PWM输出,保护电机及电路系统。
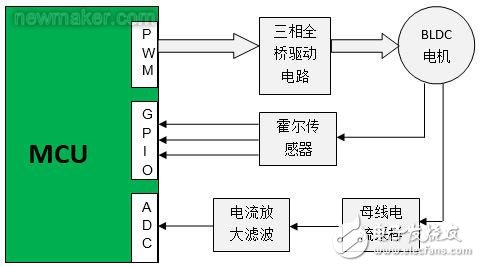
图3:BLDC电机主流商用方案示意图
总的说来,与永磁同步电机和步进电机相比,BLDC电机的控制较为简单。各半导体厂商的解决方案结构大体类似,技术也日趋同质化。通过进一步的分析可以发现,电机的换相和电流的监控都在软件中完成,但是电流的放大与处理需要外部的运放电路,速度慢,成本较高且不可靠。此外,对霍尔传感器失效的硬件检测缺乏实时有效的手段,影响电机的安全运行。
4.基于PSoC4的无刷直流电机控制架构及优势分析
PSoC4采用的ARM Cortex-M0高性能处理核心不仅能够快速完成电机的闭环速度调节和其它相应的控制运算,其内部集成的可编程UDB可以将图2所示的换相逻辑以CPLD的形式固化在芯片中,实现更快速可靠的硬件换相,无须软件干涉;此外,UDB更可以直接检测霍尔信号的失效状态,并立即关断PWM输出,迅速保护电机。
PSoC4内部集成有支持比较器模式的运算放大器(Opamp)和可编程IDAC电流源,因此对电机电流的监控也可以完全集成到PSoC4片内完成,而不需要任何外部有源器件。电机电流经采样电阻后进入片内Opamp,放大后作为片内比较器的正端输入,比较器的负端输入为片内IDAC电流源产生的过流阈值基准。比较器输出的跳变将直接关断PWM输出,保护电机。
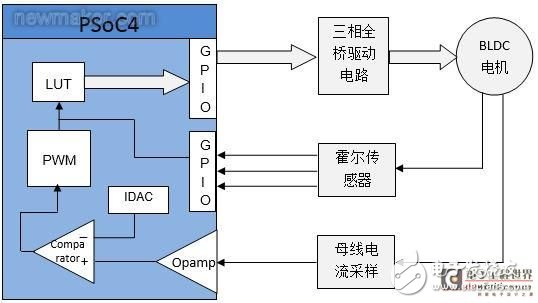
图4:基于PSoC4的无刷直流电机控制框图
对比基于PSoC4的控制方案和当前市场上的主流商用方案我们不难发现,PSoC4由于集成了丰富的片内模拟和数字资源,可以完全用片内的硬件来完成无刷直流电机的顺序换相和电流监控,比软件实现更加快速可靠,且节省了可观的片外有源器件的成本。此外,片内的UDB还可以直接检测霍尔传感器的失效状态,并迅速保护电机,这也是其它厂商所不具备的重要功能。
5. 基于PSoC4 的无刷直流电机控制系统设计实例
① 控制原理图设计
依据图4的控制框图,我们设计了图5所示的在PSoC Creator环境下的BLDC电机控制原理图。
霍尔信号经I/O引脚后直接输入UDB换相逻辑表LUT_Cmut直接驱动三相全桥电路,完成电机的硬件换相。同时霍尔信号也同步输入另一个UDB逻辑表LUT_Spd,实现霍尔传感器的失效状态检测并完成电机的速度检测。
电机电流经采样电路后输入片内运放Opamp_1,经运放和滤波后输入片内比较器,与片内IDAC产生的过流阈值基准进行比较,反转后将直接关断PWM输出,通过换相逻辑表LUT_Cmut来使电机断电。
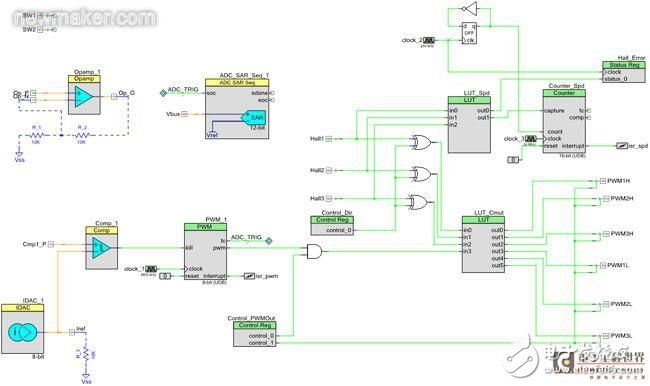
图5:步进电机控制原理图
② 控制系统软件设计
由于采用了PSoC4片内硬件进行换相、霍尔失效检测和过流检测保护,因此系统的的软件设计较为简捷,只需读取用户命令和完成速度闭环调节等即可。
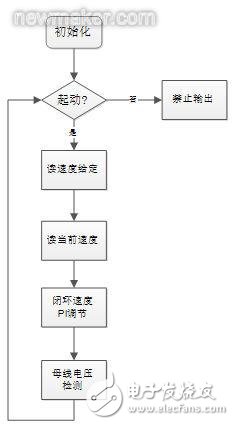
图6:主程序流程图
图6为控制系统主程序流程框图。
控制主程序首先初始化和配置PSoC4的内部资源,在主循环中首先检测用户的起停命令和速度给定,在执行速度闭环PI调节。最后检测母线电压状态。
③ 控制系统实验结果
完成系统前述的系统原理图和程序设计后,在PSoC Creator环境下编译BLDC电机控制工程,并连接PSoC4开发板,三相全桥驱动板与BLDC电机,通电后电机可正常运行。图7显示电机运行在4000RPM时的霍尔信号与三相绕组反电动势波形。通道1,2,3分别为相绕组A,B,C反电动势波形。
由图可以看出,BLDC电机运行稳定,反电动势为标准的梯形波。

图7: 三相霍尔信号与绕组反电动势波形
6. 小结
本文主要介绍了如何在Cypress推出的PSoC家族的最新成员PSoC4平台上开发有传感器BLDC电机控制系统。本文的设计过程说明,PSoC4片内集成的丰富资源使BLDC电机的换相和霍尔失效检测都可以由内部硬件来完成,简化了控制系统的软件设计并提高了可靠性。此外,片内集成的运放和比较器将电流检测和保护也放在芯片内部完成,使过流检测反应速度更快并进一步降低了成本。因此,用户可以使用PSoC4设计出具有优异性能和较低价格的有传感器BLDC电机控制系统和产品。
- 相关推荐
- 直流电机
-
基于单片机的航模无刷直流电机调速控制系统2016-01-14 0
-
电动客车用无刷直流电机控制系统仿真分析2012-11-23 1386
-
基于STM32的无位置传感器无刷直流电机控制系统2015-11-09 1008
-
采用STM8S的无刷直流电机控制系统的设计2015-12-07 1224
-
变论域模糊控制的无刷直流电机控制系统2016-04-01 599
-
基于DSP的无刷直流电机模糊控制系统2016-04-05 855
-
基于TMS320LF2407的无刷直流电机控制系统2016-05-05 661
-
基于反电势过零检测无刷直流电机控制系统的设计与研究2016-05-05 895
-
基于DSP的永磁无刷直流电机弱磁控制系统2016-12-10 885
-
无刷直流电机双闭环控制系统的设计_方炜2017-01-08 996
-
DSP在无刷直流电机控制系统仿真中的应用2017-10-20 1139
-
无刷直流电机驱动控制系统的研制资料下载2018-02-24 1364
-
两相无刷直流电机矢量控制系统2018-03-10 4272
-
基于FPGA的无位置无刷直流电机控制系统设计2021-09-24 934
-
无刷直流电机控制系统是什么2023-03-06 1603
全部0条评论

快来发表一下你的评论吧 !
