

空气压缩机防喘振控制系统的控制方案分析
工业控制
描述
分析空气压缩机防喘振控制系统现今应用较广泛的控制方案,并加以比较得出现有控制方案存在的优缺点。着重介绍模糊自适应PID控制算法的好处,通过合理有效的控制方案使系统性能达到最佳,即保证了其有效的节能,又能保证其安全性。
1.压缩机喘振产生原因
喘振是压缩机固有的一种现象。发生喘振的原因有很多,不仅与其进出口流量有关,还与压缩机负荷,被压缩气体的分子量、温度、压力及管网容量有关。喘振发生的频率与压缩机管网的容量有关,管容越大,发生喘振的频率就越低;反之,频率越高。但其产生的主要原因还是因为压缩机工作流量小于最小流量。在压缩机的运行过程中,如果其吸入量减少到一定值,压缩比下降,输出管线中气体压力高于压缩机出口压力,被压缩了的气体很快倒流入压缩机,待管线压力下降后,气体流动方向又反过来。
此时,其吸入流量和出口压力周期性低频率大幅度波动,周而复始,产生喘振,引起压缩机轴位移,使轴产生弯曲造成机组振动加大,并波及到相邻的管网,喘振强烈时,能使压缩机遭到严重破坏。
2.防喘振控制系统
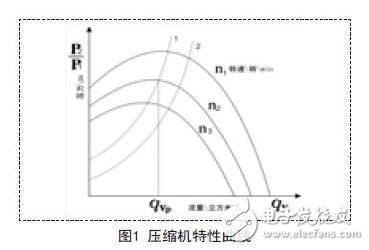
根据压缩机的主要原因,为不使压缩机出现喘振,需要保证在任何转速下,通过压缩机的实际流量都不小于喘振极限所对应的最小流量。在生产负荷下降时,须将部分出口气体经旁路返回到入口或将部分出口气体放空,保证系统工作在稳定区。目前工业生产上主要采用固定极限流量控制方案和可变极限流量控制方案。如图1所示为压缩机特性曲线1为喘振极限曲线,曲线2为防安全操作线。
2.1传统控制方案中存在的问题
在采用固定极限防喘振控制时,即决定了它只是为防喘振为目的,而不是根据工艺状况调整负荷的大小,一般适用于定转速或转速变化范围较小的机组。如果在机组转速较低的范围运行,会造成流量裕度过大,能量浪费严重,不利于节能。而可变极限流量控制是建立一条安全操作控制线,留有一定的安全裕度。
固定极限流量控制和可变极限流量控制都是不精确的近似方法通常都是提供一个很大的额外安全空间,保证机组在不理想的工况下运行,这种额外安全空间可能导致压缩机过多回流,降低了效率。考虑到气体温度及分子量对压缩机喘振流量的影响,喘振流量在出口压力、转速、入口温度、气体分子量实际上形成的是一个超曲面,即:
式中,Q为喘振流量;P为排气压力;n为转子转速;M为气体分子量;通常压缩机的参数控制是将(2)式简化为二元函数,这显然不够准确,达不到消除喘振的要求。上述两种方法不能完全补偿进气压力、温度、相对分子量的变化,从而具有一定的局限性。
2.2防喘振优化控制系统
常规PID控制器原理简单,鲁棒性较强、动态和静态特性优良,特别是对一阶对象模型具有最优调节器的结构特点。但常规PID控制器不具有在线参数整定功能,对系统模型的精确性依赖较强,对于非线性、时变且受随机干扰的控制系统,一般难以获得较好的控制性能,即使通过一些假设和简化导出的数学模型,仍有许多参数无法确定。
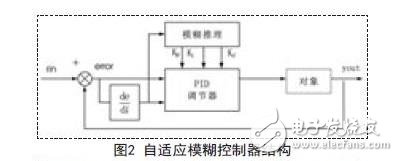
自适应模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,其结构如图2所示。
3.控制系统中应注意的问题及现有的技术
3.1防喘振调节系统应注意的问题
(1)在确定防喘振控制线及喘振线后,通常都要建立一条备用线即系统要留有一定的安全裕度,这样可以更加准确的保证系统的运行,同时又不会降低工作效率。
(2)在选择调节装置时要以经济、使用为原则兼顾先进性,用智能调节器和可编程控制器都可以,现在DCS控制系统以其良好的性能,会逐步取代了PLC控制器,但现有技术还是以可编程控制器PLC为主。
(3)为了确保系统的安全性,要对控制系统进行联锁,以避免急速变化时给系统带来的影响。
随着自动化领域的不断发展,防喘振控制系统以逐步向着智能控制方向迈进防喘振效果也会越来越好。
3.2目前已有的技术可实现的功能
(1)温度补偿功能;(2)防喘振阀门的快开慢关功能;(3)喘振检测功能;(4)自学习喘振控制的确认与复位功能;(5)对防喘振线的趋进报警功能;(6)控制器自动、手动、手自动功能;(7)多段折线代替直线的防喘振线。
在今后的研究中不单单是如何对系统进行控制,同时要考虑在控制的同时能否更好的保证其安全性及经济性。总之,应根据使用要求和工艺条件、综合选优,采用最佳防喘振调节方法,设计最合理防喘振调节系统。
- 相关推荐
- 压缩机
-
压力传感器在工业空气压缩机中的应用2018-10-11 0
-
一个可以控制空气压缩机开关的板2022-09-08 0
-
空气压缩机站远程监控系统的研究与实现2008-12-18 607
-
空气压缩机的维护2009-05-23 574
-
空气压缩机选购指南2009-05-25 559
-
基于51单片机的空气压缩机控制器2010-09-13 1292
-
高压空气压缩机故障分析和对策2011-05-27 1888
-
简要分析空气压缩机的分类及各工作原理2018-11-21 18396
-
空气压缩机主要结构说明2018-11-21 21161
-
可乐灌空气压缩机2019-01-16 4548
-
空气压缩机工作原理视频2019-02-25 31991
-
空气压缩机选型_空气压缩机参数2019-12-04 12467
-
空气压缩机会爆炸吗_空气压缩机爆炸原因及措施2019-12-04 33137
-
逆变器能带空气压缩机吗,它的运行时间2023-11-16 1355
-
螺杆式空气压缩机与活塞式空气压缩机的区别2024-01-25 3632
全部0条评论

快来发表一下你的评论吧 !
