

康谋技术 | 高效环境感知:毫米波雷达数据采集、可视化及存储方案
描述
随着自动驾驶技术的快速发展,自动驾驶的研发逐渐形成一整套的流程,包括数据采集,清洗标注,算法训练,仿真测试到量产等各技术环节。通过复杂的步骤从原始数据中提出高价值的信息,其中对原始数据的精准采集是实现车辆环境感知的基石。毫米波雷达因其出色的测距、测速能力以及对恶劣天气的鲁棒性,成为不可或缺的传感器之一。
本文将以4D毫米波雷达ARS548为例,分享毫米波雷达如何快速实现数据采集,可视化及存储策略。关于毫米波雷达的特性可进一步了解文章《毫米波雷达技术解析》。
一、ARS548毫米波雷达概述
ARS548是 4D高分辨率成像毫米波雷达(4D High Resolution Radar),如图1所示。它能够有效的测量距离(Range),速度(Velocity),水平角度(Azimuth)和俯仰角度或高度(Elevation)四个维度的信息,具备感知目标三维空间位置能力。具备以下特性:
 图1:ARS548(图片来源于网络)
图1:ARS548(图片来源于网络)1. 探测距离与视场角:最大探测距离可达300米,水平视场角为±60°,垂直视场角为±4°至±14°。
2. 数据输出:支持最多800个Detection和50个Object的同时输出,测量周期为50ms至100ms可调。
3. 接口:采用100 BASE-T1接口,支持通过车载以太网转换器与标准以太网设备进行通信。
4. 通信协议:数据通过UDP协议传输,使用多播地址方式进行数据传输。
二、硬件集成
为了能快速采集到毫米波雷达的数据,需要对其进行硬件集成与连接,如图2所示。
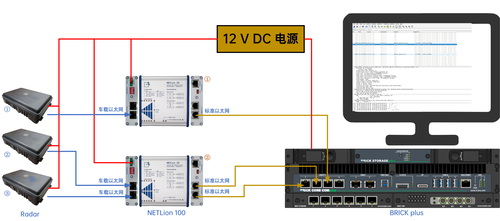 图2:Radar 硬件连接方案
图2:Radar 硬件连接方案以同时连接3个毫米波雷达为例,整个系统均支持12V的供电运行,可快速实现各设备稳定供电运行。在数据链路采集上,需要将车载以太网接口的数据转换到标准以太网,这一转换过程涉及以下步骤:
1. 网口转换:使用如康谋NETLion100转换器,将车载以太网信号转换为标准以太网信号。NETLion100集成了网络分线器(Tap)和双介质转换器于一身,支持BroadR-Reach®网络信号与100BASE-TX以太网之间的双向转换,并提供LED信号实时显示数据传输质量,可快速进行数据转换和分析。
2. 数据传输原理:雷达数据以UDP包的形式发送至指定的多播地址,康谋BRICK plus设备通过网络接口接收这些数据包。BRICKplus提供广泛的接口支持多个传感器同时连接,实现高带宽数据的采集、处理和记录。
3. 采集与监控:在BRICK plus端,可以使用Wireshark等网络分析工具来捕获和分析从雷达发送的数据包,检查数据包是否正确传输。
三、软件开发
为了采集到毫米波雷达输出的点云数据,需要理解数据的传输形式并能够实时解析。具体来说需要解决如下的问题:
1. 数据采集:实时从ARS548雷达获取原始数据,这要求系统能够与雷达硬件接口进行高效通信,并且能够处理高频率的数据流。
2. 数据解析:将原始数据转换为可读的格式,如目标的距离、速度和角度。需要对雷达数据包进行解码,并提取出有用的信息。
3. 数据可视化:将解析后的数据以图形化的方式展示,便于分析和监控。需要实时更新数据显示。
ROS提供了模块化的节点系统,便于管理和扩展。每个节点可以独立开发和测试,使得系统的整体复杂性得到有效管理。十分契合我们对问题的拆解以及功能节点的完成。此外采用ROS的发布/订阅模型可以实时采集传输的雷达数据。
对于单个毫米波雷达的采集,解析和可视化,可以通过在ROS中对应创建3个节点来实现。3个节点分别负责Radar设备接收UDP数据,解析并发布ROS消息,以及将雷达检测和对象信息转换为可视化Marker消息。
针对3(多)个毫米波雷达的同时采集,我们采用每个节点同时发布和订阅多个topic数据实现同时采集和传输。并且为了实现多个雷达数据的同时显示,采用Foxglove进行可视化呈现,呈现效果如图3所示:
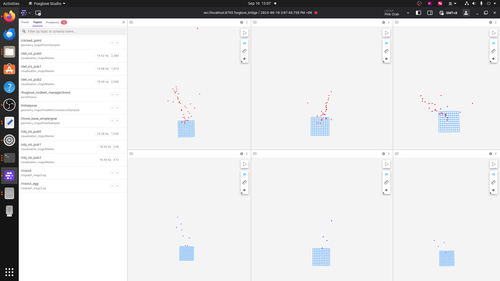 图3 :Radar 可视化
图3 :Radar 可视化随后,采用ROSbag进行数据存储,能够确保数据的完整性和准确性。
四、总结
通过集成高性能的硬件设备和采用ROS框架,实现了毫米波雷达数据的高效采集、实时处理和直观可视化,同时支持多雷达系统的数据同步采集和存储,提供了一个稳定、灵活且可扩展采集方案。
-
低速移动无人平台为什么需要毫米波雷达?2019-07-18 9293
-
康谋技术 | 毫米波雷达技术解析2024-10-15 5814
-
毫米波雷达方案对比2018-08-04 12512
-
车载毫米波雷达的技术原理与发展2019-05-10 6248
-
车载毫米波雷达的原理是什么?2019-08-07 7688
-
主流厂牌的毫米波雷达芯片有哪些?2019-09-16 10063
-
毫米波雷达(一)2019-12-16 15052
-
毫米波雷达感知技术搭建车路协同系统的可行性2020-07-01 9469
-
智能安防领域雷达技术应用,毫米波雷达模组,存在感应雷达发展2021-08-24 2320
-
人体存在感应雷达模块,飞睿科技毫米波雷达,智能雷达感应技术应用2021-09-24 1919
-
毫米波雷达模块,智能道闸技术安全方案,存在感应雷达应用2021-10-08 1789
-
毫米波雷达模组,智能家居雷达感应技术,存在感应雷达方案2021-10-29 2510
-
漫谈车载毫米波雷达历史2022-03-09 12123
-
毫米波演示可视化器用户指南2024-11-28 520
-
全国产化毫米波雷达模组技术解析及智能感知应用方案指南2025-10-24 1040
全部0条评论

快来发表一下你的评论吧 !
