

CANOpen轻松入门_数据对象(PDO)和服务数据对象(SDO)
移动通信
描述
CANopen是一种架构在控制局域网路(Controller Area Network, CAN)上的高层通讯协议,对其协议的学习很多人都觉得有难度,看来看去都觉得是云里来雾里去的,本文将让CANOpne协议不再那么神秘,带你跨过CANOpen学习道路的第一道门槛。
应用CANopen时,需要传递的配置信息和应用信息都放在过程数据对象PDO(Process data object)和服务数据对象SDO (Service data object)里面。这些对象就和市场上卖水果的箩筐,大小是一样的,只是装的东西(应用数据)不一样,如图1所示。这就是CiA301协议所规定的基础协议——“箩筐”,而CiA4xx的子协议或者用户自定义的对象就是“箩筐”里面的东西。
PDO和SDO的通讯区别在于,PDO属于过程数据,即单向传输,无需接收节点回应CAN报文来确认,从通讯术语上来说是属于“生产消费”模型。如图2所示。
而SDO属于服务数据,有指定被接收节点的地址(Node-ID),并且需要指定的接收节点回应CAN报文来确认已经接收,如果超时没有确认,则发送节点将会重新发送原报文。这种通讯方式属于常见的“服务器客户端”的通信模型,即我们通常所说的轮询式。
对于PDO和SDO的报文ID分配,为了减少网络的组态工作量,CANopen预定义了强制性的缺省标识符(CAN-ID)分配表,该分配表是基于11位CAN-ID的标准帧格式。将其划分为4位的功能码(Function-ID)和7位的节点号(Node-ID)。
在CANopen里也通常把 CAN-ID 称为COB-ID(通信对象编号)。所以我们可以分清楚两个易于混淆的名称:
COB-ID:Communication Object Identifier,即 CANopen中对某种通讯对象的报文帧ID,即CAN报文的11位ID。代表了一种通讯含义。
Node-ID:节点ID号,即CANopen网络中的节点地址,CANopen规定了逻辑上最大128个节点,所以Node-ID最大为128(7位)。
COB-ID和Node-ID无必然联系,但在过程数据对象(PDO)和服务数据对象(SDO)中,COB-ID中包含了Node-ID。
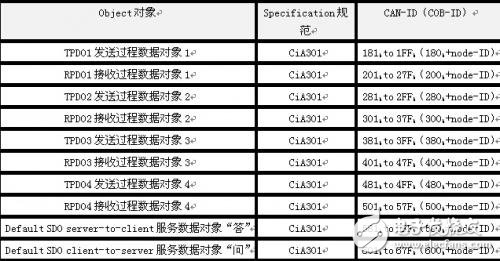
由于需要区分每个CANopen节点的输入和输出,所以PDO分为TPDO(发送PDO)和(接收RPDO),发送和接收是以CANopen从站节点为参考(如果CAN主站就相反)。TPDO和RPDO分别有4个数据对象(如TPDO有TPDO1、TPDO2、TPDO3、TPDO4;RPDO有RPDO1、RPDO2、RPDO3、RPDO4),每种数据对象就是1条CAN报文封装,如表1所示,这些都是数据收发的容器,就像图 1所示,水果箩筐为使用者准备好,就看使用者在里面放什么水果了。
而SDO就相对比较简单固定,发起通讯的“问”SDO的CAN帧ID就是600h +node-ID,这里的Node-ID是被问的节点地址,而被问的节点应“答”SDO的CAN帧ID就是580h +node-ID。一般在CANopen网络中,只有NMT主机能发起SDO通讯,进行节点参数配置或者关键性参数的传递。当然从节点也可以对其他从节点发起SDO通讯。
如表1所示。为CANopen预定义报文的PDO报文和SDO报文中的ID分类。使用者务必牢记!
XGate-COP10嵌入式CANOPEN从站模块是ZLG致远电子开发的一款拥有自主知识产权的CANopen从站通信模块。内部已经集成了CANopen从站协议栈代码,使用简单的串口通信协议即可实现与XGate-COP10的通信,并提供串口通信协议标准C文件,使现有的设备以最快的速度拥有CANopen通信能力。
-
CANopen协议核心秘籍:NMT、SDO、PDO、心跳报文一网打尽2026-03-05 790
-
CANopen转Profient网关协议介绍2025-09-25 1034
-
根据云服务器的部署方式和服务对象分为几种类型2024-11-04 1436
-
什么是对象存储?2023-03-10 13162
-
虹科干货 | 最简单实用的CANopen介绍,看完你就明白了(1)2022-07-14 4360
-
晨控RFID如何通过CANOpen与西门子PLC建立通讯2022-03-23 2467
-
PDO是什么2021-09-06 1927
-
基于STM32的CANopen通讯协议的实现2021-08-20 3489
-
过程数据对象和服务数据对象看完你就懂了2021-05-20 2659
-
【大联大世平 NXP i.MX RT1064开发板试用体验】CANopen通讯2020-11-21 2436
-
CANOpen系列教程09 _CANOpen对象字典2020-03-06 8744
-
Canopen协议读后感想2016-09-21 2452
-
轻松掌握CANOpen最难理解的对象字典2016-01-11 11954
全部0条评论

快来发表一下你的评论吧 !
