

Contiki调用protothread程序设计
电子说
描述
Contiki是一个开源的、高度可移植的多任务操作系统,适用于联网嵌入式系统和无线传感器网络,Contiki适用于存储器资源十分受限的嵌入式单片机系统,典型的配置下Contiki只占用约2Kbytes的RAM以及40Kbytes的Flash存储器。Contiki中还包括一个可选的GUI子系统,可以提供对本地串口终端、基于VNC的网络化虚拟显示或者Telnet的图形化支持。

Contiki进程的阻塞是建立在“函数返回”的基础上的,如上图所示,当进程调用PROCESS_YIELD()本质就是return,它向ContikiOS让出系统控制权。
当进程需要处理更复杂的逻辑时,如果把所有的阻塞语句“裹挟”在进程主体函数时,就会带来如下问题:主体函数会很冗长,并且很复杂。这违背软件开发的精髓----降低程序的复杂度。
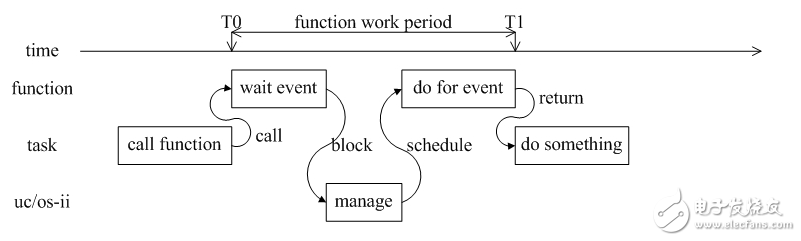
以uc/os-ii为代表的RTOS对于任务阻塞(一般使用等待:信号量、邮箱、消息队列等)是很轻松的,这种基于“上下文切换”(Context Switch)的系统,可以在任务调用的任意函数语句中“挂起自己”,如上图所示。
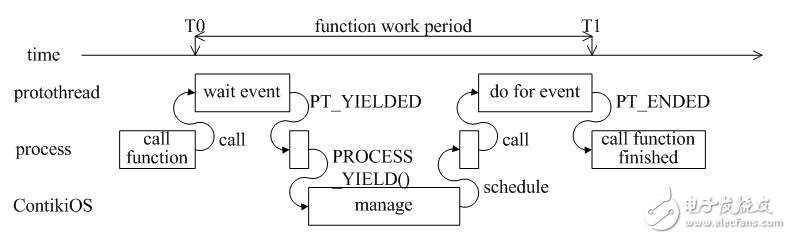
其实Contiki进程可以调用protothread实现“函数级阻塞”,如上图所示:
①当protothread等待事件时,它先向process调用PT_YIELD()“挂起函数”;process收到protothread的PT_YIELDED返回值时,执行PROCESS_YIELD()“挂起进程”,向ContikiOS让出系统控制权。
②当外部事件(一般为中断)向ContikiOS发消息时,ContikiOS先调度对应的process,process则继续调用protothread,protothread再处理该事件。
③当protothread处理完所有逻辑后,它向process返回PT_ENDED,此时process知道该protothread已经完成工作。
通过这种“函数级阻塞”技术,可以将逻辑复杂的进程分解成多个protothread,采用分而冶之的办法,让程序设计和维护代价大大降低。
小结:Contiki系统调度和阻塞实质是“函数返回”,因此进程设计有3条原则:
① 每个进程响应一个硬件的poll消息;
② 多个硬件之间的时序交给ISR用状态机完成;
③ 进程主体函数尽可能简单,如果复杂将拆分成多个protothread。
- 相关推荐
- 热点推荐
- Contiki
- protothread
-
如何使用Contiki开发程序2022-02-11 794
-
Contiki在单片机上的编程框架2021-12-07 742
-
Contiki开发1:Contiki与8位MCU2021-12-06 831
-
JAVA程序设计教程之JSP程序设计实验2019-11-05 1721
-
Visual FoxPro程序设计教程之结构化程序设计的详细资料说明2019-03-04 1427
-
简单的C程序设计教程之顺序程序设计的资料概述2018-11-16 1251
-
C语言程序设计实用教程之函数详细介绍和应用2018-10-31 1046
-
python调用matlab程序设计2017-12-04 1955
-
《Visual C# 2008程序设计经典案例设计与实现》---2017-02-07 423
-
基于AVR单片机的操作系统contiki(一个开源操作系统)2016-03-17 7706
-
Contiki学习笔记2016-01-06 1124
-
关于contiki移植2015-06-15 6320
-
PID程序设计实验2009-05-17 1383
全部0条评论

快来发表一下你的评论吧 !
