

基于带修正因子模糊PID控制的PMSM交流伺服系统
控制/MCU
描述
为了克服永磁同步电机(PMSM)伺服系统的非线性和不确定性因素的影响,提高伺服系统的控制精度和性能特性,提出了带修正因子的模糊-比例、积分和微分(PID)控制。它是集PID控制和模糊控制的优点于一体的控制系统,根据转速偏差来决定速度控制器采用模糊控制算法还是PID控制算法,并且根据控制系统的转速偏差和速度误差率,利用修正因子对模糊控制器的参数进行在线修改。仿真结果表明:带修正因子的模糊-PID控制优化了系统的动静态特性,满足系统的高性能要求,验证了该控制策略的优越性和可靠性。
伺服系统是自动控制系统中的一类,通常应用闭环控制结构来控制被控对象的某种状态,使其能够自动、连续、精确地复现输入信号的变化规律,常用于快速、精密的位置控制和速度控制场合。随着现代工业的快速发展,对控制精度和可靠性上提出了越来越高的要求。为此,曾提出多种控制方法,其中最普遍是比例、积分和微分(PID)控制方法,其算法简单,稳定性好,适用范围广,理论成熟而被广泛应用与工业控制领域,适用于可建立精确数学模型的线性定常参数系统。但实际永磁同步电机(PMSM)自身具有非线性、时变性、不确定因素等,难以建立精确的数学模型,加之系统运行时还受到不同程度的干扰,所以PID控制策略难以满足高性能PMSM伺服系统的控制要求。
与传统的PID控制方法相比,模糊控制不依赖被控对象的精确数学模型,对系统动态响应有较强的鲁棒性,但较难消除系统调节终了时的稳定误差,而PID控制方法可很好解决这一不足。因此,本文将二者结合起来则能有效地解决模糊控制存在稳态误差的缺陷。但是,固定参数的模糊控制器不能保证系统的动静态特性在大范围内获得最优。为了改善模糊控制器的性能,需根据控制系统的转速误差e和速度误差率ec对模糊控制器的参数进行在线修改,即修正因子。
l Fuzzy-PID控制器的设计
1.1 系统控制结构
伺服系统速度控制器由两部分组成:即模糊控制器和PID控制器。控制器根据速度偏差e来决定速度控制器采用何种控制算法来实现速度闭环控制。当速度偏差e大于阀值ε时,此时应以提高系统的响应速度为主,加大控制作用,使实际转子转速尽快达到给定转速,此时宜采用模糊控制算法;当速度偏差e小于阀值ε时,转子转速接近给定转速,此时应以改善系统的静态特性,提高系统的稳态精度为主,此时宜采用PID控制算法。同时针对模糊控制控制器,兼顾到系统的动态和静态特性,采用粗调和细调的参数自调整方式,从而解决了调节速度和稳态精度之间的矛盾。
图l为模糊PID速度控制原理。二维模糊控制器的输入变量是速度给定与速度反馈之差e及误差变化量ec输出变量为电流环的给定u。且定义:
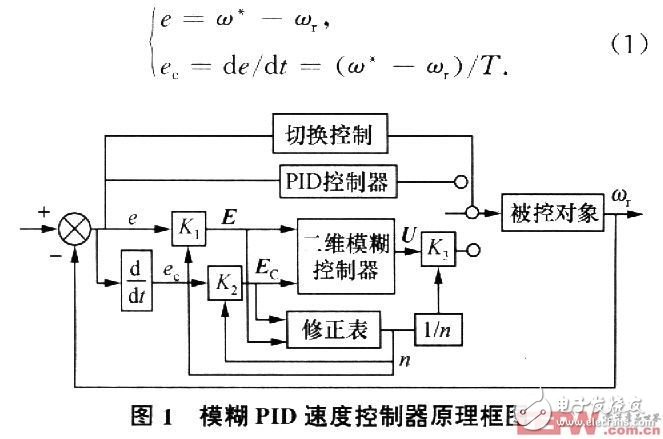
1.2 控制规则
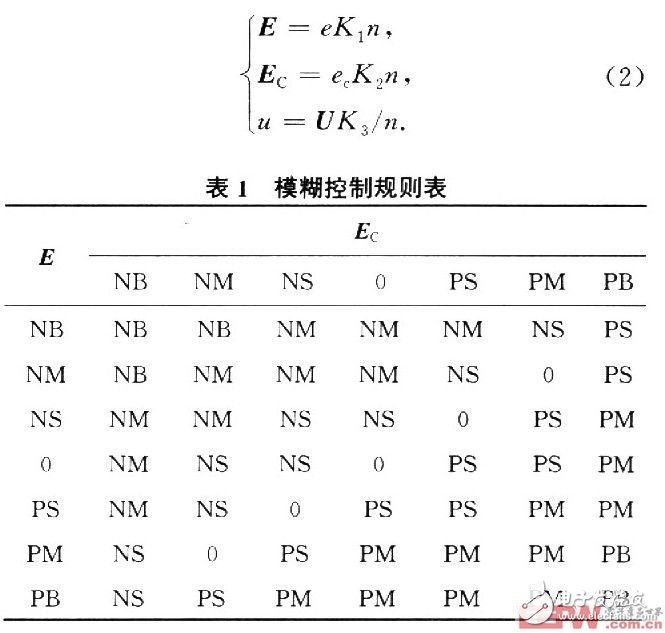
模糊规则的选取是设计模糊控制器的核心,模糊控制器的输入输出量之间是通过模糊控制规则表联系在一起的,而模糊推理规则的选取是以误差和误差变化率的大小为依据。当误差较大时,选取控制量以尽快消除误差为主;当误差较小时,控制量的选取以系统稳态为出发点,且要注意防止超调,选取的隶属函数曲线越尖挺,控制的灵敏度越高。为此选取正态分布函数作为模糊变量的隶属函数,采用重心法进行模糊判决。
设图1中的E和Ec的基本论域为[一6,6],将误差和误差变化率模糊化为13级,即E=Ec={一6,一5,一4,一3,一2,一l,O,l,2,3,4,5,6}。速度模糊控制器输出U的论域为[0,6],并将其分成7个量化等级,即U={1,2,3,4,5,6);E、Ec和U模糊集为{负大(NB),负中(NM),负小(NS),零(0),正小(PS),正中(PM),正大(PB)}。根据经验,可总结出模糊控制器的控制规则,见表1。表中结果为输入量为E和Ec时经模糊逻辑推理得到的输出量U,这些规则实质上是将操作员的控制经验加以总结而得出的一系列“IF-THEN”型的模糊条件语句。条件语句的前件为输入变量E和Ec,后件为输出变量U。
现设速度偏差e和速度偏差变化ec的量化因子分别为K1和K2:输出量U的比例因子为K3。这三个因子对控制结果也产生直接影响,K1过大易产生超调,且容易出现极限环,过小会使系统的响应时间变长;K2越大,利于抑制超调和振荡,但过大系统应速度变慢,且K2过大或过小都会使超调增大,且容易出现极限环;K3的确定对模糊控制器的控制性能影响极大,它的选择与实际控制对象有关。K3过小会使系统的动态响应过程变长,K3过大会使超调变大,导致系统振荡。为使系统响应速度快又无超调,通常,在线修改参数因子K1、K2和K3,从而修正基本论域e、ec和“与论域E、Ec和U,之间的关系。
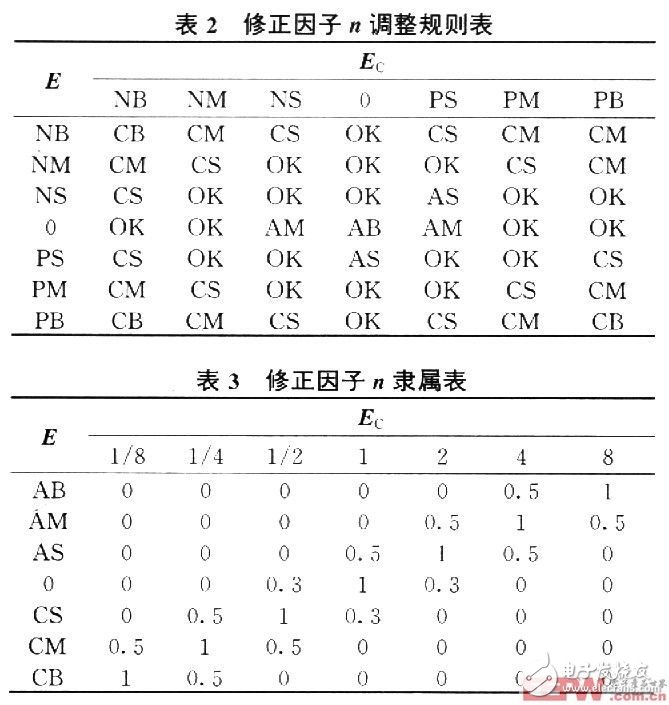
修正因子n的调整原则是:当e和ec较大时,系统应减少偏差、加快动态过程,这时应选取较大的控制量,即增大K3、减小K1和K2;当e和ec较小时,即系统接近稳态值时,这时应减小K3、增大K1和K2,减小超调量、提高系统的稳态精度。
设修正因子为n,模糊化的变量为N,模糊集为{高放(AB),中放(AM),低放(AS),不变(OK),小缩(CS),中缩(CM),大缩(CB));N的论域N={1/8,1/4,1/2,1,2,4,8}。设基本模糊控制器原量化因子、比例因子分别为,根据量化后的E和Ec得到修正因子,修正因子n的调整规则表和隶属表分别见表2和表3,控制规则实质同表1相似。此时量化因子、比例因子调整为,则有:
2 系统仿真模型
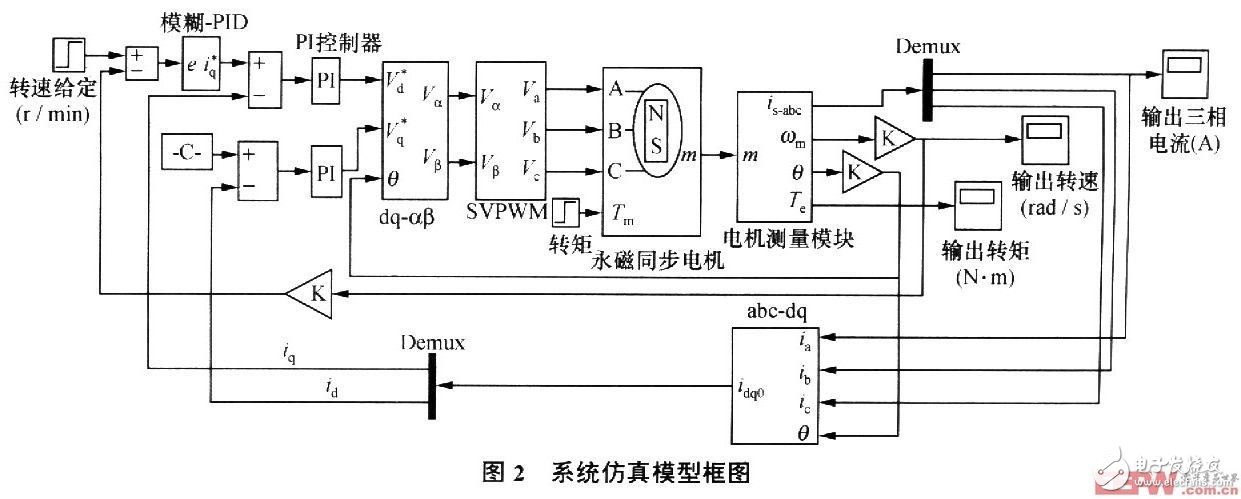
本系统采用MATLAB7.0强大功能的Simulink仿真模块进行仿真。仿真中设置PMSM参数如下:
定子电阻R=2.875 Ω;电枢电感Ld=Lq=8.510-3H;磁通φ=0.175 Wb;极对数p=4。并且设置电机在O.2 s时转矩由4 Nm突变为7 Nm;转速给定为700 r/min。图2给出了系统仿真框图。
本系统采用的是基于数字信号处理器(DSP)的全数字交流伺服系统。这样控制函数都可通过软件编程在DSP里实现,而不用另建硬件电路,使得整个系统结构变得简单紧凑。而且全数字控制使得伺服系统的可靠性更高,控制参数比硬件电路更易调整。
系统主要包括:
1)磁极位置检测模块和电流检测模块;
2)速度环和电流环控制;
3)坐标变换模块;
4)空间矢量脉宽调制(SVPWM)模块;
5)整流器和逆变器模块。
系统中功率模块驱动采用目前最常用的脉宽调制(PWM)优化方法SVPWM,它能明显减少逆变器输出电流的谐波成份和电机的谐波损耗,降低脉动转矩。随着DSP技术的发展,计算功能的加强,存储容量的增大,使得PWM的数字化实现越来越方便。
电流环采用PI控制算法,速度环采用fuzzy-PID控制,电流调节器和转速调节器采用带饱和限幅的PI调节器。
电流环电枢电流的反馈值与电流的指令信号进行比较得电流误差,由电流环调节器按误差进行调节控制,使电流快速跟随指令值变化,稳态时电流无静差。电流控制器输出的经旋转/静止坐标系变换到静止坐标系下的Vα和Vβ后,再通过功率驱动模块得到电机三相绕组的电压Va、Vb和Vc;检测绕组电流经过静止/旋转坐标系变换到旋转坐标系下的id和iq。
速度环中速度指令信号与速度反馈信号的速度误差,由速度调节器按速度误差进行调节控制,使电动机转速快速跟随指令值变化,稳态时速度无静差,动态时限制转速超调,会大大减小负载变化对转速变化的影响。同时,由于转速负反馈的作用,检测转子角速度并经过系数转换得到转子的实际转速。检测变量与参考变量
较后的误差作为速度环和电流环的输入,从而构成了整个系统的闭环控制。
3 系统仿真结果
为了比较PID控制和Fuzzyr-PID控制性能,图3和图4给出了分别采用PID控制和Fuzzy-PID控制时的速度阶跃响应。
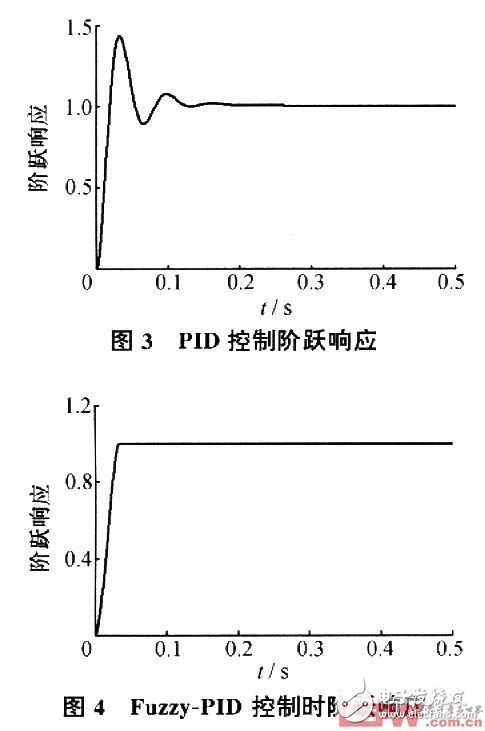
由图可以看出,当采用PID控制时,速度出现超调和振荡现象,这将在电机启动过程中造成很大的冲击;采用Fuzzy-PID后,无超调和振荡现象,鲁棒性好,系统响应速度明显改善。
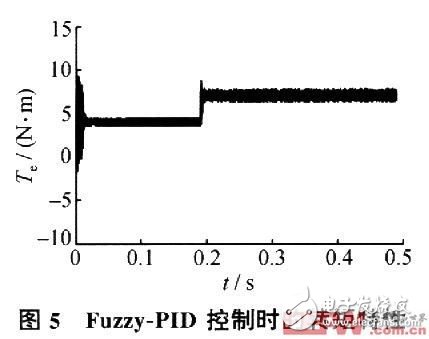
图5和图6为对本系统采用Fuzzy-PID)控制时转矩Te和转速n的仿真图。由图可知,当负载转矩在0.2 s由4Nm突然增至7Nm时,转矩很快调整到新的稳定值;同时由于SVPWM的连续调节,转矩的脉动小;而转速在O.2 s时稍微下降,后迅速恢复原速度。
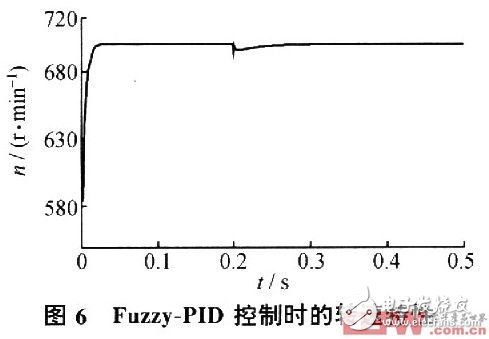
由此可见,系统所采用的控制策略具有跟踪性能好、响应速度快、过渡时间短、无超调、稳定性好以及控制精度高等特点,这与前面的理论分析是一致的。
4 结 论
本文将fuzzy控制和PID控制相结合,应用到PMSM交流伺服控制系统当中,不仅避免了控制器的设计时受被控对象的复杂数学模型的限制,而且克服了伺服系统的时变性、强耦合性和不确定性因素的影响,提高了系统响应速度和控制精度,跟踪性能好。另外,为了改善模糊控制器的性能系统控制,利用修正因子对模糊控制器的参数进行在线修改,保证了系统具有良好的动态和静态性能和鲁棒性,证明了此方法的正确性和可行性。
-
交流伺服电机的模糊PID控制及GUI设计2016-04-06 887
-
带修正因子模糊PID控制的PMSM交流伺服系统2016-04-01 695
-
伺服系统的PID控制技术下载2015-12-09 891
-
自适应模糊PID控制的太阳光跟踪伺服系统2012-12-17 927
-
Matlab在模糊伺服系统控制中的应用2011-09-08 1060
-
PLC液位带修正因子模糊控制系统设计2009-09-14 865
-
基于模糊PID控制的交流伺服系统2009-09-12 976
-
在线自调整修正因子模糊控制方法和应用2009-08-26 588
-
PSO算法在数控机床交流伺服系统PID参数优化中的应用2009-05-17 4322
全部0条评论

快来发表一下你的评论吧 !
