

基于漩涡湍流辅助的微流控平台,可实现类精子结构的微型机器人一步成型
描述
微游动机器人在生物医学中的应用前景广阔,特别是在精准药物递送和微创手术中。然而,传统的微游动机器人存在制造工艺复杂、材料要求高以及环境适应性差等问题。据麦姆斯咨询报道,香港科技大学申亚京教授的研究团队提出了一种基于漩涡湍流辅助的微流控平台(VTAM),可实现类精子结构的微型机器人一步成型,配合外部磁场驱动为药物递送提供了新的载体。该研究团队进一步将微游动器导入生物体模拟环境,并在特定位置释放药物,展示了这种新型微游动机器人在生物医学中的应用前景。
香港科技大学申教授表示:“我们早前的研究发现,鳐鱼精子具有特殊的双节螺旋结构,能够在不同粘度的液体环境中实现高效推进[PANS, 118, e2024329118 (2021)](图1)。但是,如何批量制造类精子结构的微型机器人并实现高效驱动和可控药物释放一直是个难题。在这项工作中,我们提出的漩涡湍流辅助的微流控平台(VTAM),克服了传统的微流控平台对加工非对称结构的复杂化,为解决这一挑战提供了思路。”
图1 鳐鱼精子的双节螺旋结构
如图2所示,漩涡湍流辅助的微流控平台结合了一个传统的十字形微流控芯片和一个通过旋转磁力搅拌器形成的漩涡容器,该微流控芯片形成单分散的磁性藻酸盐液滴并通过毛细管转移到氯化钙溶液漩涡容器。液滴在漩涡流的作用下爆裂(图3),内部的磁性藻酸盐溶液暴露并沿着漩涡流的方向被抽出,形成类精子的非对称结构。在抽出尾部之后,由于与氯化钙溶液中的钙离子发生交联反应,液滴在几毫秒内固化。
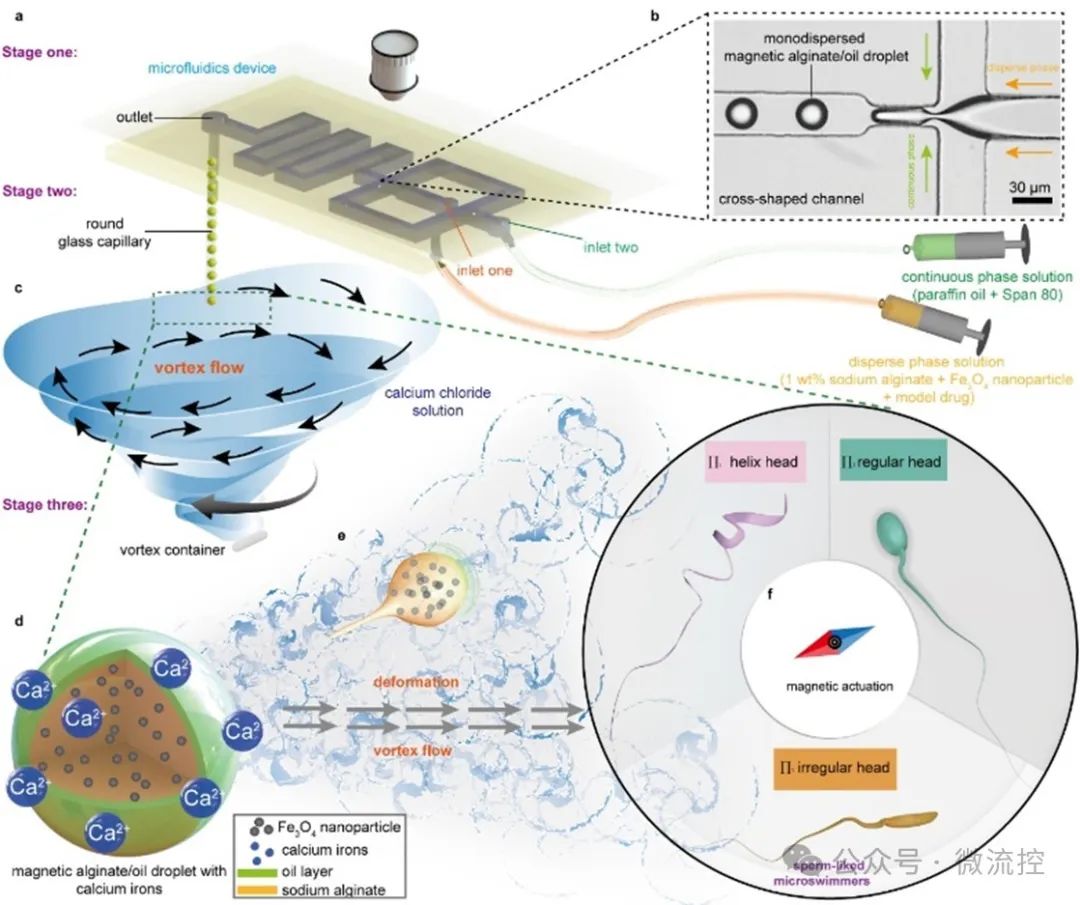
图2 漩涡湍流辅助的微流控平台及类精子结构的微型机器人形成机理展示
图3 液滴破乳的动态仿真模拟
该论文第一作者谭蓉提到:“漩涡湍流辅助的微流控平台结合了一个传统的十字形微流控芯片和一个通过旋转磁力搅拌器形成的漩涡容器,通过该策略制备的微游动器具有可生物降解的核壳头部和柔性尾部,其形态可通过涡流转速和溶液浓度调节(图4)。”
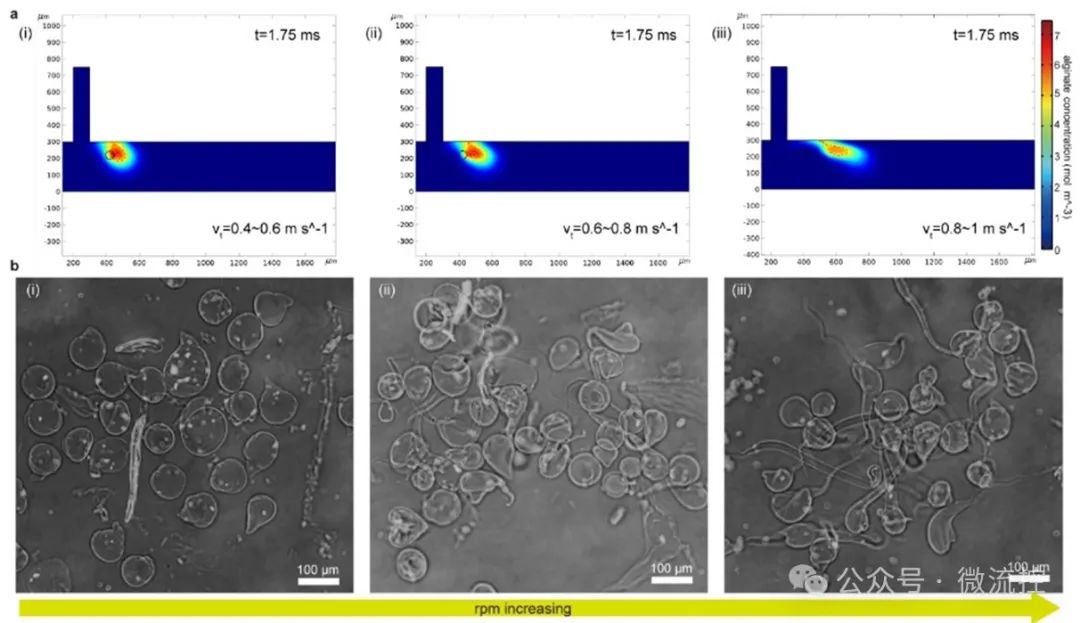
图4 类精子结构的微型机器人尾部长短可以通过涡旋转速进行调节
在磁场的作用下,这种类精子结构的微型机器人可以灵活的在液体中游动,展示了其在生物医学中的应用前景(图5及图6)。
图5 不同磁场频率下,不规则头结构的类精子结构微型机器人游动展示
图6 同一磁场下,三种不对称类精子结构微型机器人游动展示(规则头部,不规则头部,螺旋头部)
为了提高新型微游动器的药物递送性能,如图7所示,该研究团队在微游动器表面涂覆了一层酸碱性敏感膜(Alginate-Ca-Chitosan),这种膜能够在不同pH环境下实现药物的缓慢和可控释放。在实验中,涂覆ACA膜的微游动器在不同环境条件下都表现出色,药物释放效果显著优于未涂覆膜的微游动器(图8)。
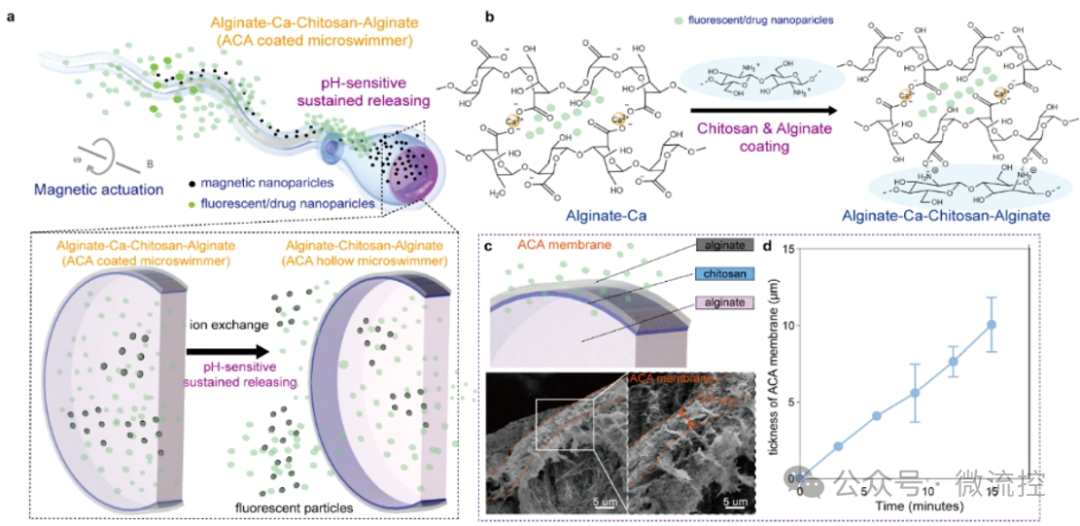
图7 酸碱性敏感膜(Alginate-Ca-Chitosan)形成机理及性能表征展示
图8 包覆酸碱性敏感膜(Alginate-Ca-Chitosan)的类精子结构微型机器人展示了更显著的药物释放效果
香港科技大学申教授补充道:“漩涡湍流辅助的微流控平台提供了一种制造复杂三维多形态结构的方法,是传统层流设备无法实现的。在后期工作中,为将其推向实际应用,还有许多挑战需要克服。例如,我们需要进一步优化工艺来确保微游动机器人加工的一致性和稳定性。此外,还需进行进一步的体内测试,以验证这些微游动机器人在临床环境中的实际效果。”
此次研究不仅展示了仿生设计在生物医学工程中的应用潜力,也为未来的药物递送系统提供了新的思路。随着技术的不断进步,相信新型类精子结构的微型机器人将在不久的将来为人类健康事业做出更大贡献。
-
基于微流控和浸渍密封技术的微型机器人2023-01-03 1943
-
微型机器人由哪些部分组成2021-09-10 1754
-
沈阳自动化所微纳米课题组在微型机器人研究领域取得新突破2021-01-30 3278
-
选择微型机器人电机需要考虑什么?2021-01-22 2301
-
微型机器人关节使用超声波电机的优势2020-11-02 2824
-
研究人员发明微型昆虫机器人,离全自主微型机器人更近一步2020-08-27 2852
-
详谈仿白细胞微型机器人的应用2020-08-06 1285
-
微型机器人会给我们的生活带来什么影响2019-10-29 4055
-
微型机器人可以给我们带来什么好处2019-10-24 9607
-
预测2026年微型机器人市场将达20亿美元2019-07-29 1516
-
爆了!人工智能下微型机器人TOP112016-08-01 7528
-
穿肠过肚微型机器人:未来医疗的神奇法宝2015-06-03 4362
-
血管微型机器人无损伤内驱动方法2009-09-08 730
-
血管微型机器人无损伤体内驱动方法2009-06-28 2336
全部0条评论

快来发表一下你的评论吧 !
