

Made with KiCad(十二):JPL开源漫游车
描述
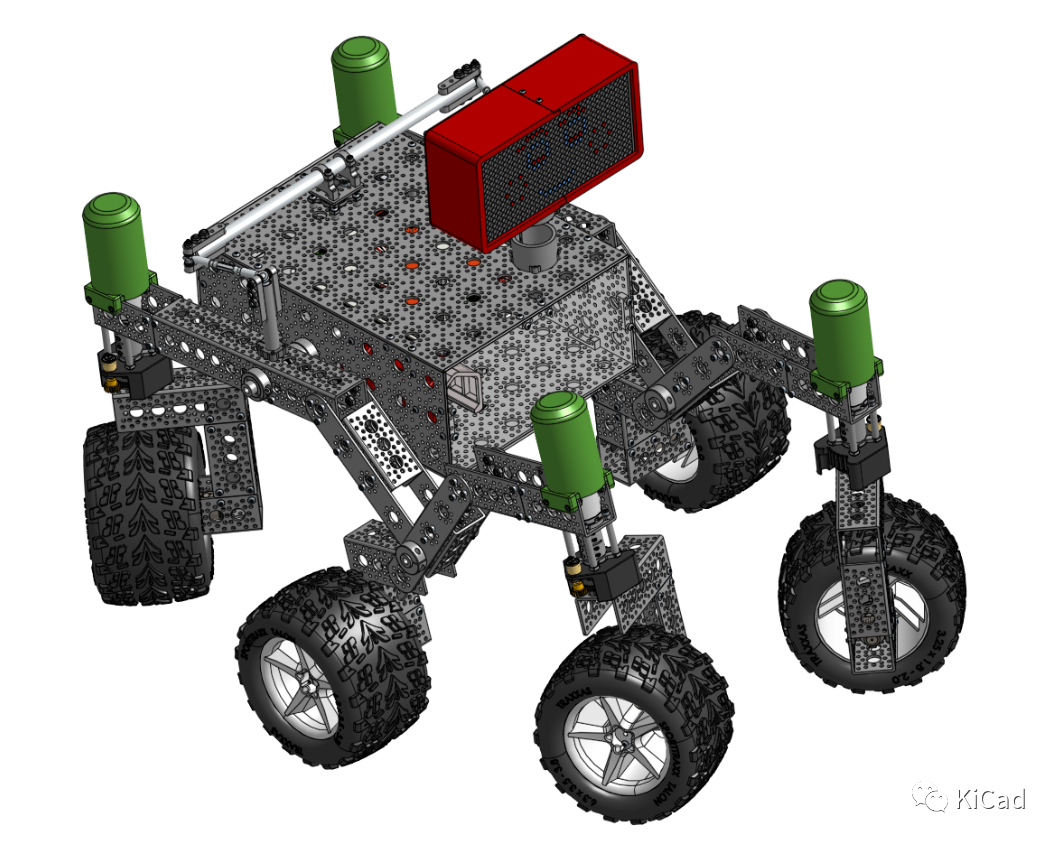
“ JPL 开源漫游车是 JPL 用于探索火星表面的六轮漫游车设计的缩减版,是一种开源、自己动手制造的漫游车。 ”
概览
JPL 开源漫游车是 JPL 用于探索火星表面的六轮漫游车设计的缩减版,是一个开源、自己动手制造的漫游车。开源漫游车的设计几乎完全采用现成的消费者部件(COTS)。该项目旨在为那些希望参与机械工程、软件、电子或机器人技术的人提供教学和学习经验。

Spec及技术参数
您制作的机器人的具体属性将取决于您为系统购买的电子设备和电机类型。下面显示的属性是按照我们建议的部件(BOM)组装的机器人版本。您可以尝试看看哪些部件可以进行规格升级。
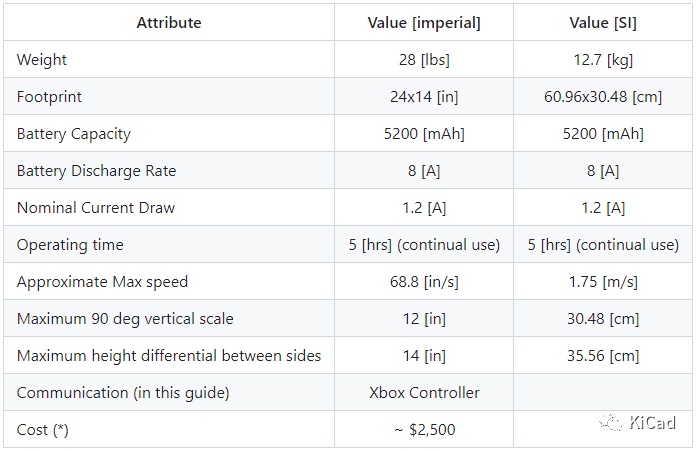
上述统计数据取决于您在购买部件时选择的组件。例如,您可以选择更高转速的电机(以更快地驱动漫游车),但要牺牲最大失速扭矩,这可能会限制漫游车的爬坡能力。您可以在 GoBilda 网站上找到易于与漫游车设计其他部分集成的电机。 功能 该漫游车的设计功能与火星上的六轮漫游车设计类似,并采用了火星漫游车用于穿越岩石表面的一些主要驱动机械装置:
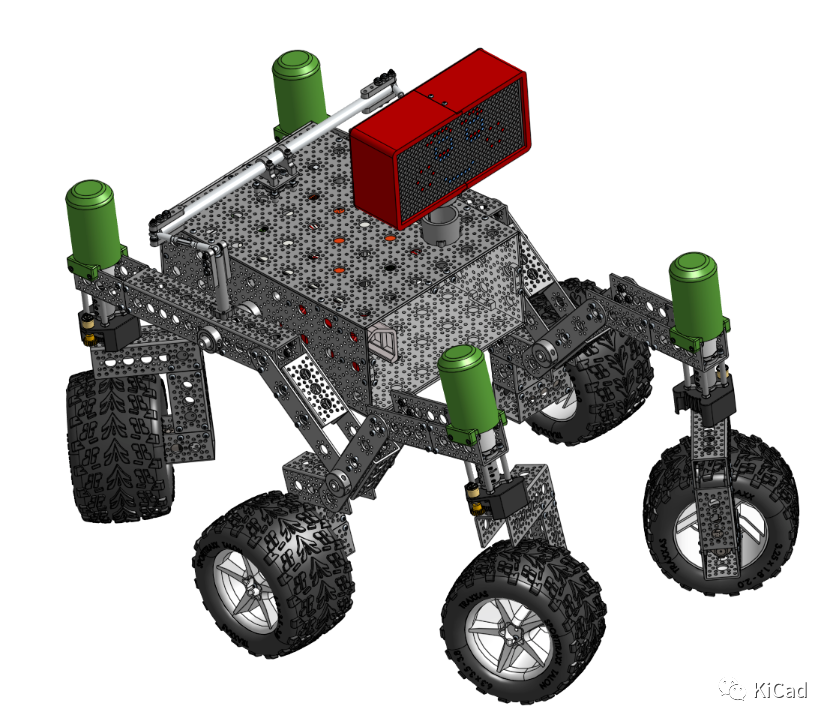
摇臂式悬挂系统:Rocker-Bogie悬挂系统允许所有6个车轮在翻越障碍物时持续与地面接触
差速枢轴:在攀爬时,可将重量从漫游车的一侧机械地卸载到另一侧
6 轮阿克曼转向系统:驱动和转向/回转装置,用于控制车轮的指向以及每个车轮的移动速度。
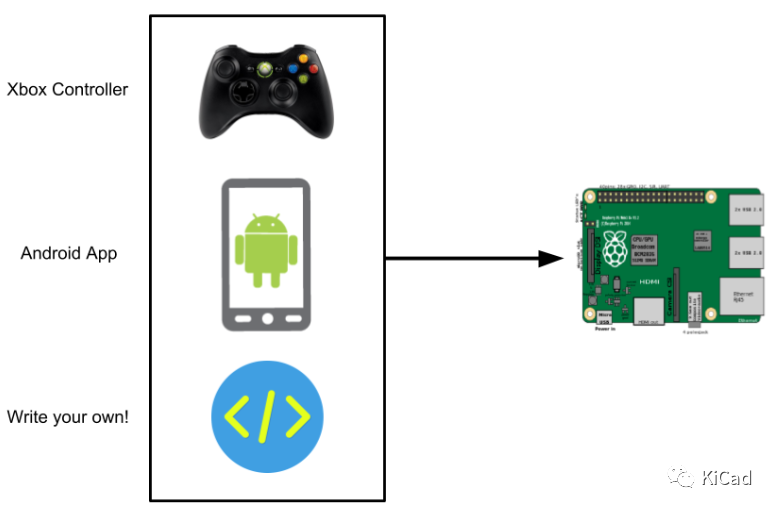
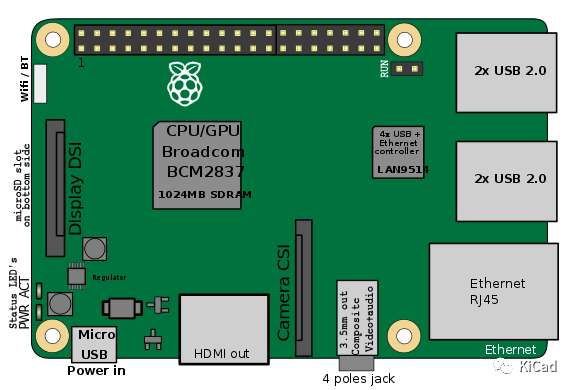
我们选择树莓派(Raspberry Pi)作为机器人的 "大脑",是因为它具有多功能性、易接近性、简易性,并且能够添加和升级您自己的改装。任何可以与 Raspberry Pi 通信的方法(蓝牙、WiFi、USB 设备等)都可以连接到机器人的控制系统。
以下是 Raspberry Pi 上的开放通信端口和硬件:
4 个 USB 端口(使用 Xbox 控制器时为 3 个)
RPi 摄像头端口
1 个 I2C 总线(使用 LED 矩阵屏时为 0)
2 个 SPI 总线(使用 LED 矩阵屏幕时为 1)
3.5 毫米音频插孔
13 个 GPIO 引脚(使用 LED 矩阵屏幕时为 6 个)
使用上述端口,理论上您可以通过摄像头、USB转接器连接到任何东西(您自己的视频游戏控制器、USB 麦克风或其他......发挥创意!)。或使用 Pi 的 GPIO 端口(距离传感器、加速度计等)的任何接口自主驱动漫游车。我们只提供了两种简单的控制漫游车的方法......我们希望你能想出更多的方法!
对于漫游车的动力系统,我们还提供了充足的备用电源,可用于您自己的附加组件和升级。更多详细信息,请参阅电气子系统文档: https://github.com/nasa-jpl/open-source-rover/tree/master/electrical
在线3D模型

还有一个开源漫游车的 Onshape 模型。该模型包括漫游车在整个构建说明中每个步骤的状态!因此,在制作过程中,除了参考制作说明中的照片外,您还可以参考在线 3D 模型,以确保制作顺利进行。注意:最新的模型和唯一的真相来源是 SolidWorks 组件,OnShape 模型可能已经过时。
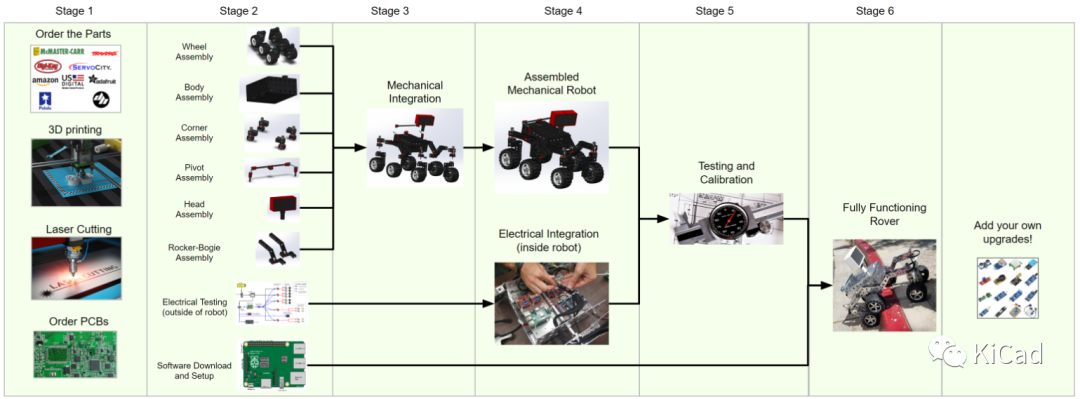
Rover装配阶段
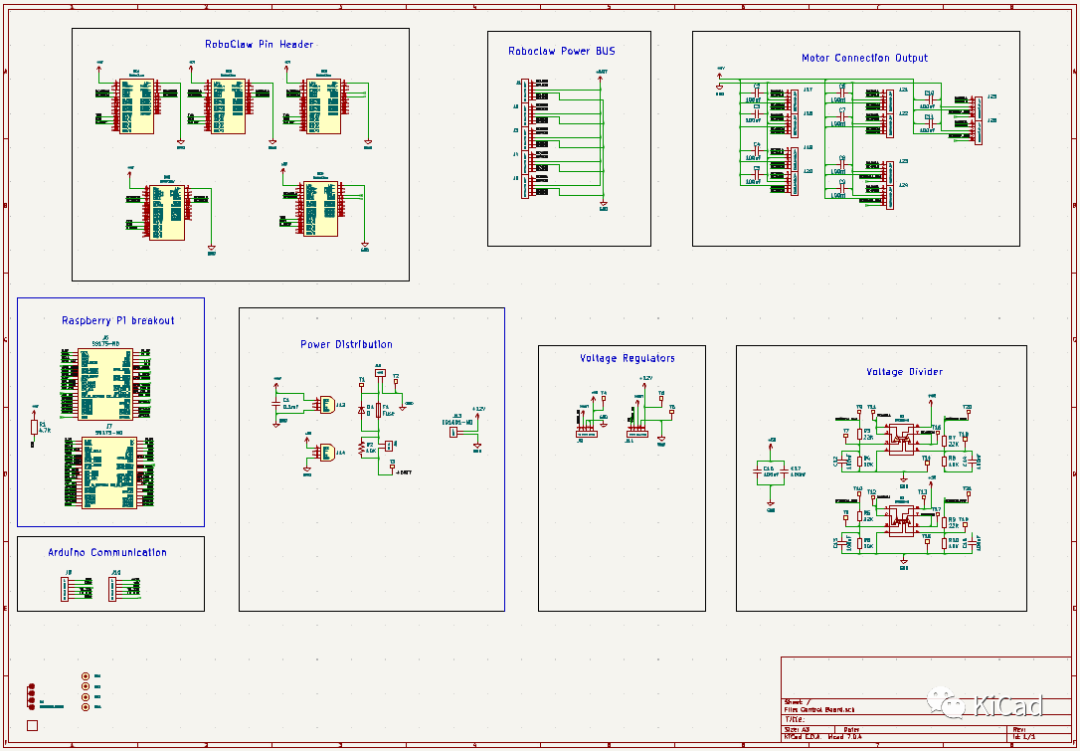
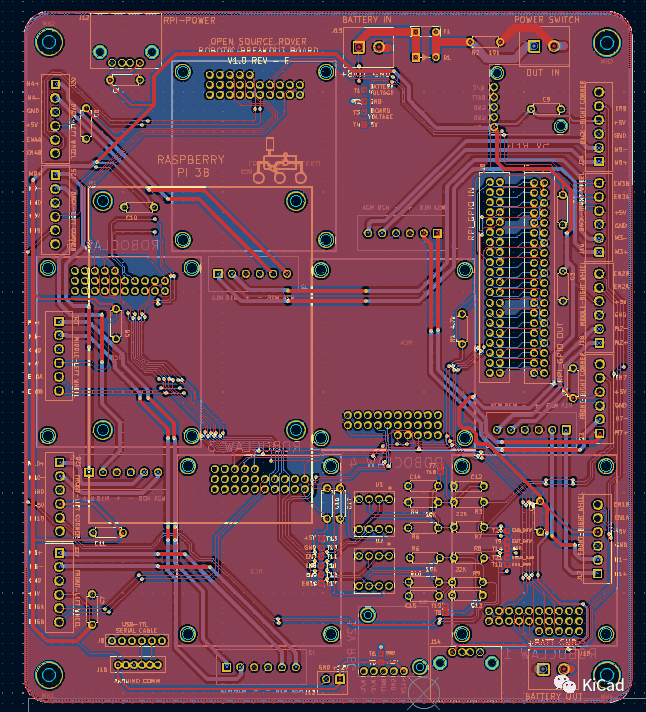
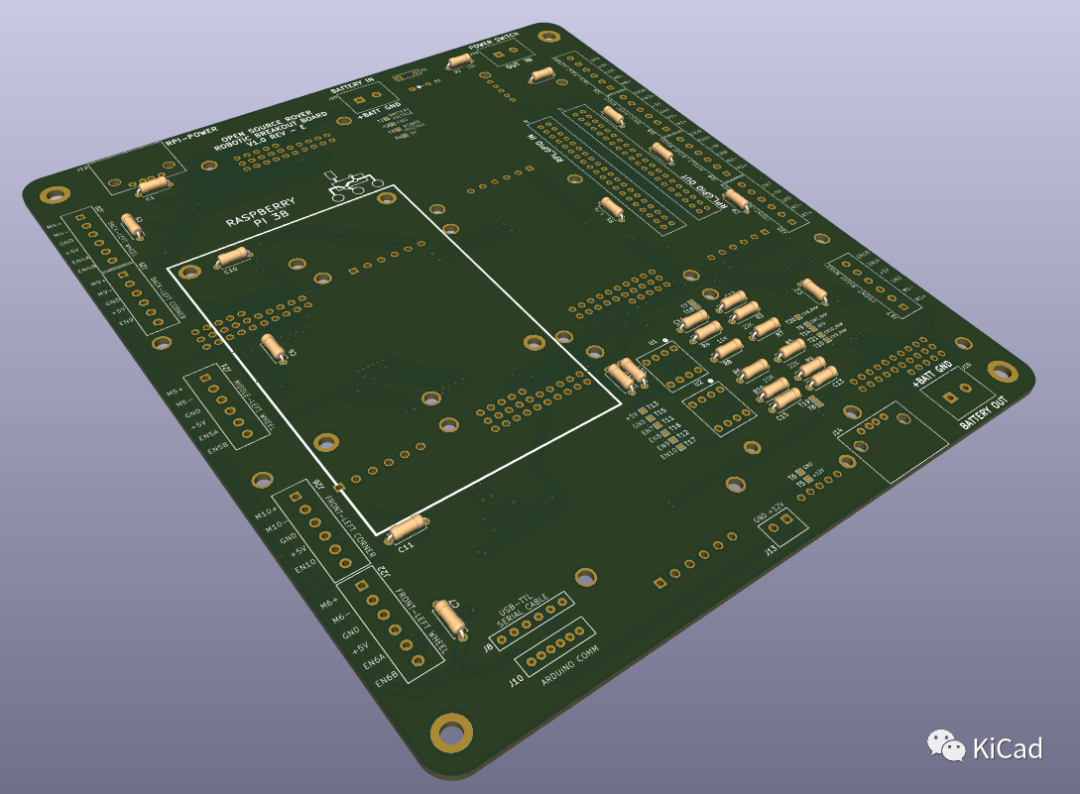
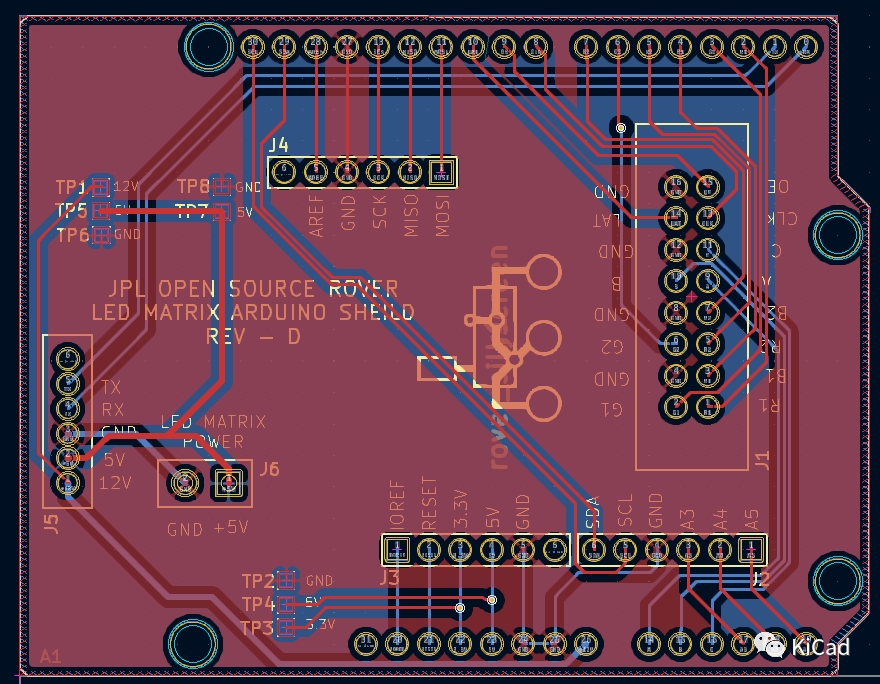
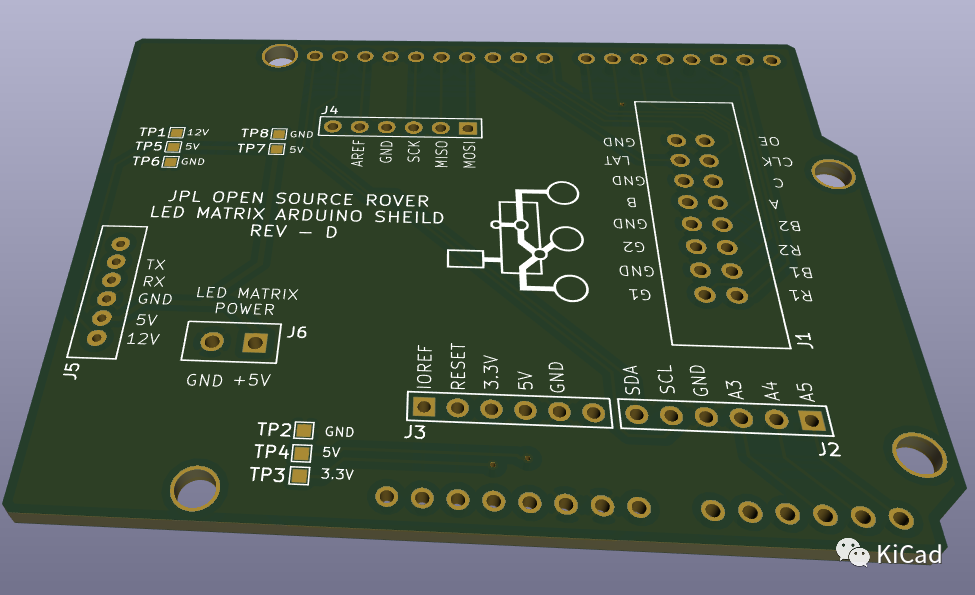
原理图 & PCB
控制板:
Arduino-Shield板
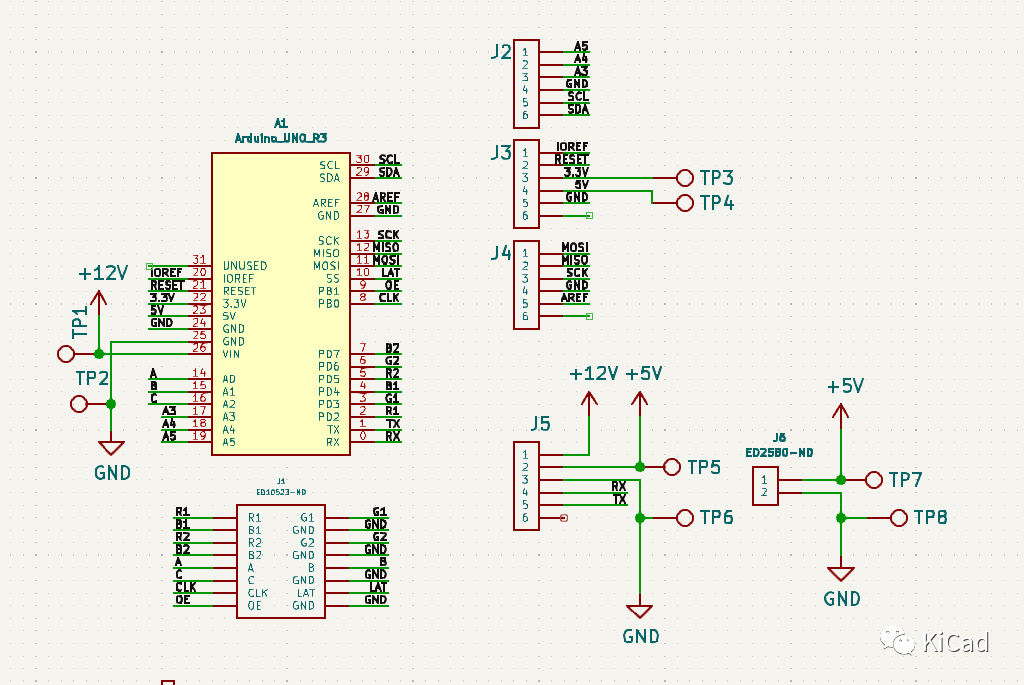
控制板接口
License
Apache-2.0 License
仓库 & 下载
可以在Github中获取开源仓库: https://github.com/nasa-jpl/open-source-rover/tree/master 仓库文件较大,Github不稳定的用户也可以在公众号后台输入 “火星车” 进行下载,仓库中包含了软硬件及机械机构文件。
-
开源EDA软件Kicad的本地化2018-05-22 68848
-
关于帮助农民的地球漫游车开源案例2022-12-22 767
-
洞穴探险漫游车开源分享2023-02-06 622
-
Made with KiCad(106):ScopeFun 多功能开源仪器2024-11-12 2787
-
Made with KiCad(107):LattePanda-Mu 载板(Lite Carrier)2024-12-07 2122
-
Made with KiCad(111):Vimdrones AM32 ESC 开发板2025-01-07 2750
-
Made with KiCad(118):Inkplate 4 TEMPERA 墨水屏终端2025-03-07 1541
-
Made with KiCad(121):OpenRPNCalc 开源科学 RPN 计算器2025-03-26 1971
-
Made with KiCad(122):ANAVI Miracle Emitter2025-04-16 1504
-
Made with KiCad(128):CANBoard V2 开源一款支持CAN的简单IO板2025-05-27 1586
-
开源 Made with KiCad(129):CatSniffer IoT 多协议工具2025-06-09 2559
-
开源工具 Made with KiCad(131):BomberCat 安全测试工具2025-06-19 8396
-
Made with KiCad(135):Echo - 开源的音乐播放器2025-07-16 3561
-
Made with KiCad(138):AnyShake Explorer一款开源、专业级的地震监测系统2025-08-11 2328
-
Made with KiCad(140):Hassoscope Pro 2G 带宽的 USB 示波器2025-09-01 6748
全部0条评论

快来发表一下你的评论吧 !
