

零基础开发小安派-Eyes-S1外设篇——UART
描述
AiPi-Eyes-S1是安信可开源团队专门为Ai-M61-32S设计的一款开发板,支持WiFi6、BLE5.3。所搭载的Ai-M61-32S 模组具有丰富的外设接口,具体包括 DVP、MJPEG、Dispaly、AudioCodec、USB2.0、SDU、以太网 (EMAC)、SD/MMC(SDH)、SPI、UART、I2C、I2S、PWM、GPDAC、GPADC、ACOMP 和 GPIO 等。
AiPi-Eyes-S1集成了SPI屏幕接口,DVP摄像头接口,外置ES8388音频编解码芯片以及预留TF卡座,并且引出USB接口,可接入USB摄像头。
从零开始学习小安派:
1、零基础开发小安派-Eyes-S1【入门篇】——初识小安派-Eyes-S1
2、零基础开发小安派-Eyes-S1【入门篇】——安装VMware与Ubuntu
3、入门篇:零基础开发小安派-Eyes-S1——新建工程并烧录调试
4、零基础开发小安派-Eyes-S1入门篇——Win下SSH连接Linux
5、零基础开发小安派-Eyes-S1【入门篇】——Samba共享文件夹
6、零基础开发小安派-Eyes-S1【入门篇】——工程文件架构
7、零基础开发小安派-Eyes-S1【外设篇】——GPIO 输入输出
8、零基础开发小安派-Eyes-S1【外设篇】——GPIO中断编程
9、零基础开发小安派-Eyes-S1【外设篇】——PWM
通用异步收发传输器(Universal Asynchronous Receiver/Transmitter, 通常称为 UART) 是一种异步收发传输器,提供了与外部设备进行全双工数据交换的灵活方式。BL616/BL618 共有 2 组 UART,配合 DMA 使用,可以实现高效的数据通信。
01、了解小安派-Eyes-S1 的 UART
小安派的 UART 是全双工异步通讯,具有丰富的中断控制,DMA 传输、485 协议、10Mbps 波特率、LIN 总线协议等等特征。其有三个时钟源,分别是 XCK、160Mhz CLK 和 BCLK。UART 的控制器分为两个功能模块:发送器和接收器。
数据位长度可选 5 / 6 / 7 / 8 比特
#define UART_DATA_BITS_5 0
#define UART_DATA_BITS_6 1
#define UART_DATA_BITS_7 2
#define UART_DATA_BITS_8 3
#define UART_DATA_BITS_9 4
停止位长度可选 0.5 / 1 / 1.5 / 2 比特
#define UART_STOP_BITS_0_5 0
#define UART_STOP_BITS_1 1
#define UART_STOP_BITS_1_5 2
#define UART_STOP_BITS_2 3
支持 奇 / 偶 / 无 / 校验比特
#define UART_PARITY_NONE 0
#define UART_PARITY_ODD 1
#define UART_PARITY_EVEN 2
#define UART_PARITY_MARK 3
#define UART_PARITY_SPACE 4
可配置 MSB / LSB 优先输出
#define UART_LSB_FIRST 0
#define UART_MSB_FIRST 1
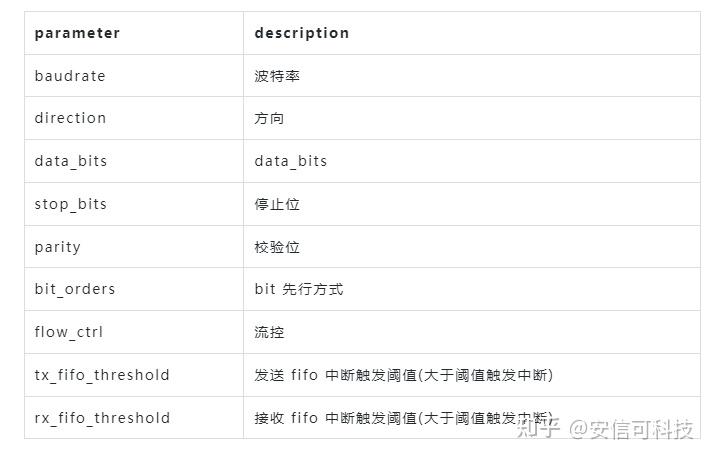
1.struct bflb_uart_config_s
说明:uart 初始化配置结构体
struct bflb_uart_config_s {
uint32_t baudrate;
uint8_t direction;
uint8_t data_bits;
uint8_t stop_bits;
uint8_t parity;
uint8_t bit_order;
uint8_t flow_ctrl;
uint8_t tx_fifo_threshold;
uint8_t rx_fifo_threshold;
};
2.bflb_uart_init
说明: 初始化 uart。使用之前需要开启 uart ip 时钟、设置 uart 时钟源和分频值、选择 gpio 为 uart 中的一个功能。
void bflb_uart_init(struct bflb_device_s *dev, const struct bflb_uart_config_s *config);

3.bflb_uart_deinit
说明: 反初始化 uart。
void bflb_uart_deinit(struct bflb_device_s *dev);

4.bflb_uart_link_txdma
说明: uart tx dma 使能开关。
void bflb_uart_link_txdma(struct bflb_device_s *dev, bool enable);
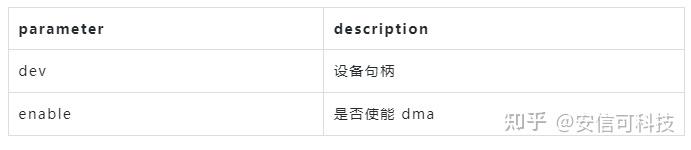
5.bflb_uart_link_rxdma
说明: uart rx dma 使能开关。
void bflb_uart_link_rxdma(struct bflb_device_s *dev, bool enable);

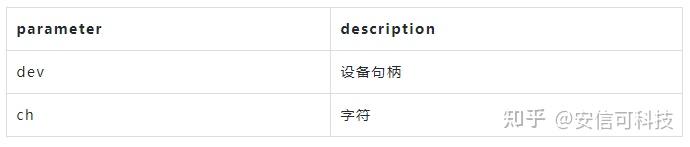
6.bflb_uart_putchar
说明: 通过 uart 阻塞式发送一个字符。
int bflb_uart_putchar(struct bflb_device_s *dev, int ch);
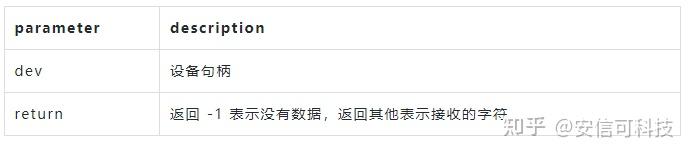
7.bflb_uart_getchar
说明: 通过 uart 异步接收一个字符。
int bflb_uart_getchar(struct bflb_device_s *dev);
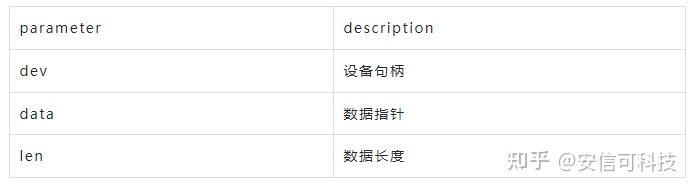
8.bflb_uart_put
说明:通过 uart 轮询发送数据。
int bflb_uart_put(struct bflb_device_s *dev, uint8_t *data, uint32_t len);

9.bflb_uart_put_block
说明:通过 uart 阻塞式发送数据。
int bflb_uart_put_block(struct bflb_device_s *dev, uint8_t *data, uint32_t len);
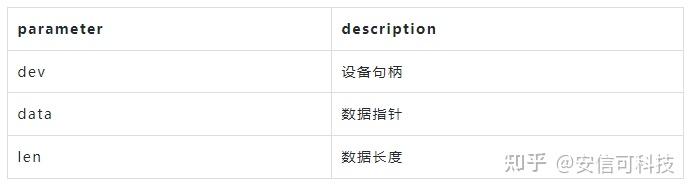
10.bflb_uart_get
说明:通过 uart 异步阻塞接收数据。
int bflb_uart_get(struct bflb_device_s *dev, uint8_t *data, uint32_t len);
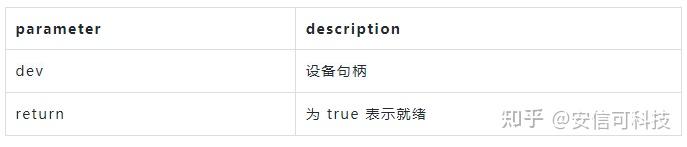
11.bflb_uart_txready
说明: 查询 uart tx fifo 是否准备就绪,准备好才可以填充字符
bool bflb_uart_txready(struct bflb_device_s *dev);
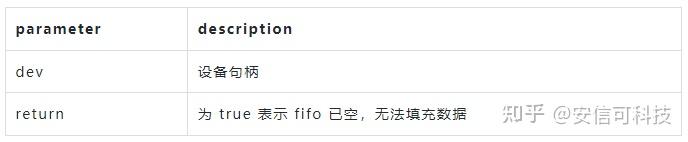
12.bflb_uart_txempty
说明: 查询 uart tx fifo 是否为空。
bool bflb_uart_txempty(struct bflb_device_s *dev);
13.bflb_uart_rxavailable
说明: 查询 uart rx 是否有数据。
bool bflb_uart_rxavailable(struct bflb_device_s *dev);

14.bflb_uart_txint_mask
说明: uart tx fifo 阈值中断屏蔽开关,开启后超过设定阈值则触发中断。
void bflb_uart_txint_mask(struct bflb_device_s *dev, bool mask);

15.bflb_uart_rxint_mask
说明: uart rx fifo 阈值中断和超时屏蔽开关,开启后超过设定阈值则或者超时则触发中断。
void bflb_uart_rxint_mask(struct bflb_device_s *dev, bool mask);
16.bflb_uart_errint_mask
说明:uart 错误中断屏蔽开关。
void bflb_uart_errint_mask(struct bflb_device_s *dev, bool mask);
17.bflb_uart_get_intstatus
说明: 获取 uart 中断标志。
uint32_t bflb_uart_get_intstatus(struct bflb_device_s *dev);

返回的中断标志有以下选项:
#define UART_INTSTS_TX_END (1 << 0)
#define UART_INTSTS_RX_END (1 << 1)
#define UART_INTSTS_TX_FIFO (1 << 2)
#define UART_INTSTS_RX_FIFO (1 << 3)
#define UART_INTSTS_RTO (1 << 4)
#define UART_INTSTS_PCE (1 << 5)
#define UART_INTSTS_TX_FER (1 << 6)
#define UART_INTSTS_RX_FER (1 << 7)
#if !defined(BL602)
#define UART_INTSTS_RX_LSE (1 << 8)
#endif
#if !defined(BL602) && !defined(BL702)
#define UART_INTSTS_RX_BCR (1 << 9)
#define UART_INTSTS_RX_ADS (1 << 10)
#define UART_INTSTS_RX_AD5 (1 << 11)
#endif
18.bflb_uart_int_clear
说明: 清除 uart 中断标志。
void bflb_uart_int_clear(struct bflb_device_s *dev, uint32_t int_clear);
清除值可填入以下参数:
#define UART_INTCLR_TX_END (1 << 0)
#define UART_INTCLR_RX_END (1 << 1)
#define UART_INTCLR_RTO (1 << 4)
#define UART_INTCLR_PCE (1 << 5)
#if !defined(BL602)
#define UART_INTCLR_RX_LSE (1 << 8)
#endif
#if !defined(BL602) && !defined(BL702)
#define UART_INTCLR_RX_BCR (1 << 9)
#define UART_INTCLR_RX_ADS (1 << 10)
#define UART_INTCLR_RX_AD5 (1 << 11)
#endif
19.bflb_uart_feature_control
说明:uart 其他特性相关控制,一般不常用。
int bflb_uart_feature_control(struct bflb_device_s *dev, int cmd, size_t arg);
cmd 可以填入以下参数:
#define UART_CMD_SET_BAUD_RATE (0x01)
#define UART_CMD_SET_DATA_BITS (0x02)
#define UART_CMD_SET_STOP_BITS (0x03)
#define UART_CMD_SET_PARITY_BITS (0x04)
#define UART_CMD_CLR_TX_FIFO (0x05)
#define UART_CMD_CLR_RX_FIFO (0x06)
#define UART_CMD_SET_RTO_VALUE (0x07)
#define UART_CMD_SET_RTS_VALUE (0x08)
#define UART_CMD_GET_TX_FIFO_CNT (0x09)
#define UART_CMD_GET_RX_FIFO_CNT (0x0a)
#define UART_CMD_SET_AUTO_BAUD (0x0b)
#define UART_CMD_GET_AUTO_BAUD (0x0c)
#define UART_CMD_SET_BREAK_VALUE (0x0d)
#define UART_CMD_SET_TX_LIN_VALUE (0x0e)
#define UART_CMD_SET_RX_LIN_VALUE (0x0f)
#define UART_CMD_SET_TX_RX_EN (0x10)
#define UART_CMD_SET_TX_RS485_EN (0x11)
#define UART_CMD_SET_TX_RS485_POLARITY (0x12)
#define UART_CMD_SET_ABR_ALLOWABLE_ERROR (0x13)
#define UART_CMD_SET_SW_RTS_CONTROL (0x14)
#define UART_CMD_IR_CONFIG (0x15)
#define UART_CMD_SET_TX_FREERUN (0x16)
#define UART_CMD_SET_TX_END_INTERRUPT (0x17)
#define UART_CMD_SET_RX_END_INTERRUPT (0x18)
#define UART_CMD_SET_TX_TRANSFER_LEN (0x19)
#define UART_CMD_SET_RX_TRANSFER_LEN (0x20)
#define UART_CMD_SET_TX_EN (0x21)
#define UART_CMD_SET_BCR_END_INTERRUPT (0x22)
#define UART_CMD_GET_BCR_COUNT (0x23)
02、示例:UART 发送,中断接收
小安派-Eyes-S1 具有两组串口,UART0 已经被映射为 prtinf 函数,也就是 LOG 函数,我们还剩下一组 UART1 可使用,而且小安派的 GPIO 可以任意配置为 UART 的 TX 或 RX,这里使用 GPIO_1 和 GPIO_0 配置为 UART1。
实现的效果是,在主函数里轮询发送数据,当 UART1 接收到其他数据时,触发接收中断并使用 UART0 发送,也就是 LOG 函数发送出来,实现透传的效果。
Main
//头文件
#include "bflb_mtimer.h"
#include "bflb_uart.h"
#include "bflb_gpio.h"
#include "board.h"
//设置名为uart1的外设句柄
struct bflb_device_s *uart1;
//定义需要轮询发送的数据
static uint8_t uart_txbuf[4] = { 0,1,2,3 };
void uart_isr(int irq, void *arg);
//初始化串口配置,如波特率,数据位和停止位
//tx_fifo_threshold 和 rx_fifo_threshold 参数设置表示为fifo中断的触发阈值
static void uart_init(void)
{
struct bflb_device_s* gpio;
struct bflb_uart_config_s cfg = {
.baudrate = 115200,
.data_bits = UART_DATA_BITS_8,
.stop_bits = UART_STOP_BITS_1,
.parity = UART_PARITY_NONE,
.flow_ctrl = 0,
.tx_fifo_threshold = 4,
.rx_fifo_threshold = 4,
};
gpio = bflb_device_get_by_name("gpio");
uart1 = bflb_device_get_by_name("uart1");
//将GPIO_1和GPIO_0设置为TX和RX
bflb_gpio_uart_init(gpio, GPIO_PIN_1, GPIO_UART_FUNC_UART1_TX);
bflb_gpio_uart_init(gpio, GPIO_PIN_0, GPIO_UART_FUNC_UART1_RX);
bflb_uart_init(uart1, &cfg);
bflb_uart_txint_mask(uart1, true);
bflb_uart_rxint_mask(uart1, false);
bflb_irq_attach(uart1->irq_num, uart_isr, NULL);
bflb_irq_enable(uart1->irq_num);
}
//中断服务函数,触发中断后会进入该函数
void uart_isr(int irq, void *arg)
{
uint32_t intstatus = bflb_uart_get_intstatus(uart1);
//这里注释了fifo管道的RX中断触发,fifo的触发方式也就是上面设置的字节数4,也就是要接收4个字节以上数据才会触发fifo中断
// if (intstatus & UART_INTSTS_RX_FIFO) {
// printf("rx fiforn");
// while (bflb_uart_rxavailable(uart1)) {
// printf("0x%02xrn", bflb_uart_getchar(uart1));
// }
// }
//接收超时中断,当一段时间内数据没有接收后便会停止,在触发中断后,轮询使用prtintf发送uart1接收到的字符,停止接收后清空中断标志等待下一次发送
if (intstatus & UART_INTSTS_RTO) {
printf("rtorn");
while (bflb_uart_rxavailable(uart1)) {
printf("0x%02xrn", bflb_uart_getchar(uart1));
}
bflb_uart_int_clear(uart1, UART_INTCLR_RTO);
}
}
int main(void)
{
board_init();
uart_init();
//主函数每两秒轮询一次发送 uart_txbuf 数据
while (1) {
bflb_mtimer_delay_ms(2000);
bflb_uart_put(uart1,uart_txbuf,4);
}
}
实现效果
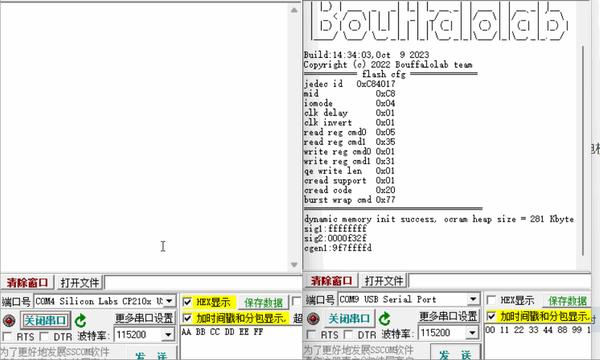
uart1 每两秒发送一次 00 01 02 03 ,左边框中可以看见持续接收到数据,当 uart1 接收到其他数据时如 AA BB CC DD EE FF 或 11 22 33 ,可以在右边的 uart0 框中看见接收到的数据,可以看见触发的中断方式为 RTO 超时。可以尝试 fifo 的方式看看两种方式的差异性,在后续处理串口协议时,面对不同的协议采用不同的方式来应对。
审核编辑 黄宇
-
零基础开发小安派-Eyes-S1 进阶篇 ——通过屏幕输入连接 Wi-Fi2025-01-16 1158
-
零基础开发AiPi-Eyes-S1——通过屏幕输入连接Wi-Fi2025-01-15 1328
-
零基础开发小安派-Eyes-S1【进阶篇】——初识 LVGL 并搭建最小工程2025-01-06 1786
-
零基础开发小安派-Eyes-S1——初识LVGL并搭建最小工程2025-01-03 1750
-
零基础开发小安派-Eyes-S1 外设篇——DAC2024-12-27 1973
-
零基础开发小安派-Eyes-S1外设篇——I2S2024-12-13 2494
-
零基础开发小安派-Eyes-S1【外设篇】——FLASH2024-12-05 1446
-
零基础开发小安派-Eyes-S1 外设篇 ——I2C2024-11-27 1832
-
零基础开发小安派-Eyes-S1【外设篇】——PWM2024-11-06 1124
-
零基础开发小安派-Eyes-S1外设篇——GPIO中断编程2024-10-29 1775
-
零基础开发小安派-Eyes-S1外设篇——GPIO 输入输出2024-10-25 2065
-
小安派-Eyes-S1外设接口简介2023-09-18 1761
-
零基础开发安信可小安派-Eyes-S1【入门篇】——初识小安派-Eyes-S12023-09-08 1371
全部0条评论

快来发表一下你的评论吧 !
