

10BASE-T1S在工业和汽车中的应用方案
描述
10BASE-T1S是实现工业4.0、汽车 IVN和智能建筑中边缘设备全以太网化的缺失环节,可与促进人工智能和机器学习的100/1000BASE-T1以太网主干网对接。这是因为10BASE-T1S可直接连接到以太网MAC层下数据链路层 (L2) 的现有OSI参考模型层,无需使用低效且昂贵的协议网关。10BASE-T1S多点传送SPE也是10BASE-T1L长距离(1千米)点对点传输的最佳补充。《边缘设备全以太网方案:10BASE-T1S》白皮书将系统介绍探讨10BASE-T1S如何在工业和汽车中运作,本文为第一部分,将介绍工业4.0概述、汽车区域控制与全以太网化、相关标准等。
工业4.0:诱人的方案
工业4.0可以用图1所示的自上而下的层级金字塔来说明,人工智能(AI)、机器学习(ML)、计划、执行、自动化、跟踪、库存控制、监督控制和编组占据了工厂的前三层,底部的蓝色层是工厂车间,其中边缘节点如机器人、执行器、运动部件、传感器和阀门在生产线上执行制造工作。
顶部三层通常通过点对点(P2P)局域网(LAN)进行通信。以千兆位级速度运行,而工厂车间通过多种多点网络现场总线协议进行通信,如HART、RS-485、Mod-bus、DeviceNet、Profi-bus和CAN等,通过屏蔽或非屏蔽的双绞线以千比特或兆比特的速度通信。这需要在高速局域网和低速工厂网络之间使用昂贵的网关,同时导致通信碎片化,更不用说给软件维护增加额外的复杂性了。
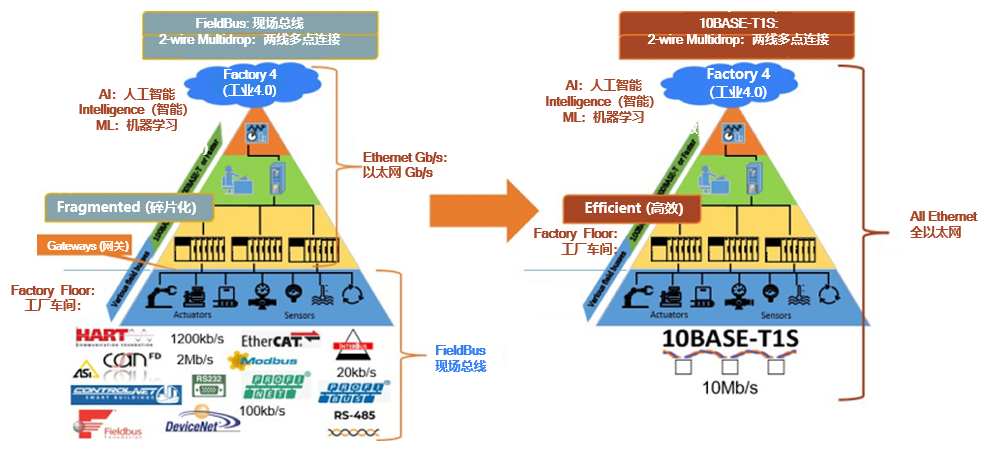
图1. 工业4.0全以太网方案
汽车区域控制与全以太网化
现代内燃机(ICE)和纯电动汽车(BEV)包含多达150个电子控制单元(ECU),分布在整个车辆中,控制如转向、制动、底盘和动力系统等关键功能,以及信息娱乐和舒适性等不太重要的功能。
自20世纪90年代以来,全球汽车行业选择了CAN、CAN FD、Lin和用于IVN的FlexRay “multi−drop”协议。Multi-Drop表示ECU网络布线以菊花链形式相互连接,点对点拓扑减少了电缆总长度和重量(图2)。CAN、CAN FD和FlexRay使用非屏蔽单对铜双绞线。而LIN使用无屏蔽的单根铜线,进一步减轻了电缆重量,直接缓解了“里程焦虑”。这是BEV客户所关注的重点。
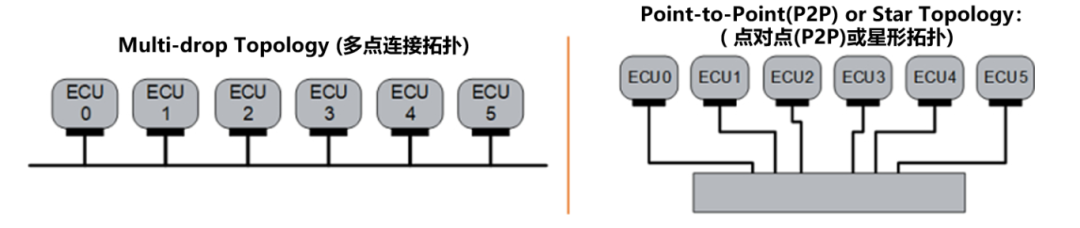
图2. 多点与P2P(星型)网络拓扑
LIN支持最大20 kb/s的数据传输速率,CAN支持最大约1 MB/s的数据传输速率,CAN FD支持最大约5 MB/s的数据传输速率,FlexRay支持最大10 MB/s的数据传输速率。
先进驾驶辅助系统(ADAS)负责一些复杂的服务,如车道偏离警告、防撞、自适应巡航控制、盲点检测和泊车辅助。这些复杂的服务处理计算机,在多个中央融合模块内聚合,中央融合模块由高带宽汽车以太网P2P SPE骨干网连接,以千兆位级速率传输,以增强驾驶安全(图3)。
为了更好地执行这些复杂的ADAS服务,将IVN迁移到区域化电气/电子面向服务架构,其中ECU和融合模块被划分为前-右区域、前-左区域、后-右区域、后-左区域和中央区域(图3)。
与图1左侧工厂的底部蓝色层一样,汽车IVN中的所有边缘ECU都使用CAN、CAN-FD、LIN或FlexRay,需要汽车以太网主干网关连接。与工业4.0一样,全以太网化是实现这些由ADAS驱动的复杂服务的合理方案。虽然与简单功能相关的ECU可能会继续使用传统的LIN、CAN和FlexRay协议,但与复杂的服务相关的大多数ECU将采用10BASE-T1S,如果不是为了提高效率、降低成本和减轻重量(无网关),也是为了以太网“免费”提供的(现有的)增强安全功能。网络安全对汽车市场至关重要,本白皮书稍后将在安全和MACsec的框架内进行讨论。
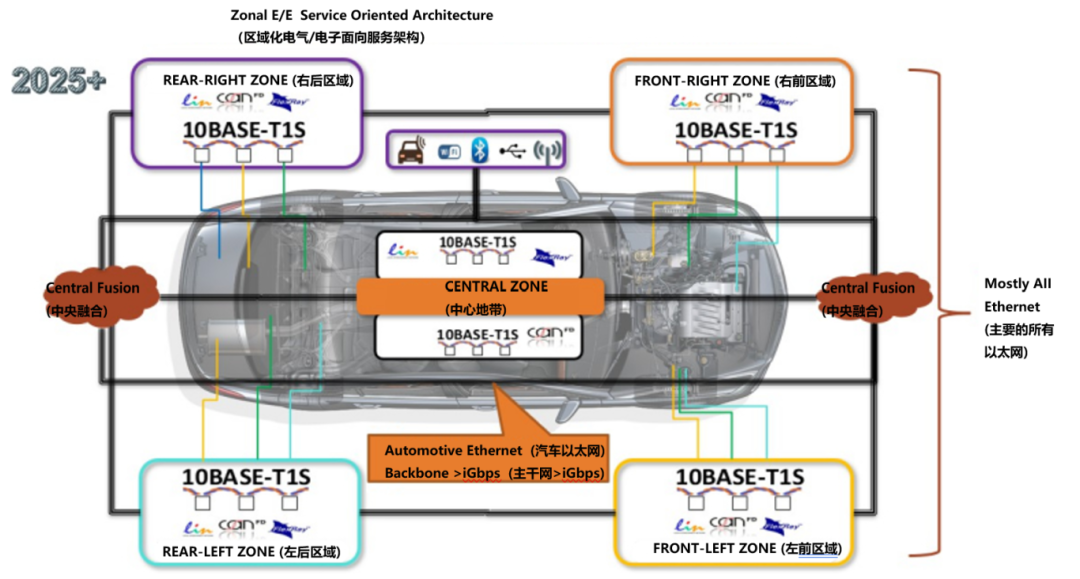
图3. 区域电气/电子面向服务的体系结构
IEEE802.3cg规范和10BASE−T1S
2019年,IEEE批准了针对工业、汽车和智能建筑10Mb/s网络的802.3cg规范。定义了两个新的物理层:
1. 10BASE-T1L(第146条)
2. 10BASE-T1S(第147条)
10BASE-T1L(或长距离)是一种物理层规范,适用于10MB/以太网局域网,通过单对平衡导线,在点对点(P2P)拓扑结构中以全双工方式传输,传输距离至少为1000米。
10BASE-T1S(或称Short Reach)是一种物理层规范,适用于通过单平衡导线对(通常为26 AWG电缆)的10 MB/s以太网局域网,至少为:
a) 点对点(P2P)拓扑,最少15米的全双工,或
b) 最短25米,半双工,跨多分支拓扑,支持最少8个节点。节点可与混合数据段连接在一条总线上,或连接在最大长度不超过10 cm的短截线末端(图4)(注1)。
1. 尽管这些数字对于理解大致范围是有用的,但应注意,它们在802.3cg中仅仅是指导性的。根据电缆、连接器、PHY和外部元件的选择,可能会超出这些限制。文本的规范部分定义了IL/RL以及MDI阻抗的范围。
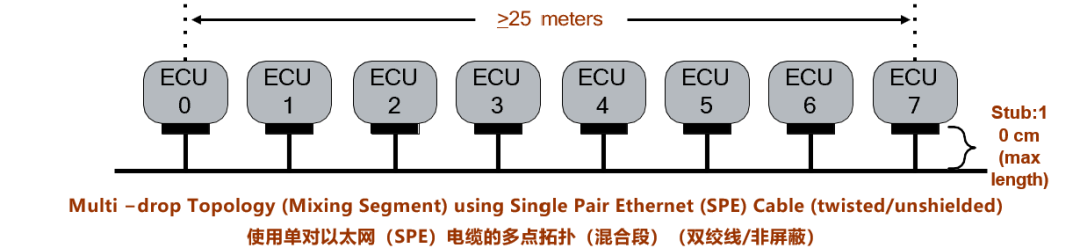
图4.10BASE−T1S多点混合拓扑
全双工表示节点可以同时发送和接收,半双工表示节点可以发送或接收,但不能同时进行。
描述10BASE-T1S的简便方法是将其与下图4右侧所示的传统以太网进行比较。其中每个节点通过点对点(P2P)连接到智能交换机,最长100米。每个节点包含一个PHY和一个MAC。每个MAC都包含一个全球唯一的48位地址。以太网帧的范围为64到1518字节,包括源MAC地址和目的MAC地址。智能交换机会记住每个端口的MAC地址,在不发生冲突下,将以太网帧路由到局域网中的任何节点。大大提高了局域网的整体吞吐量。
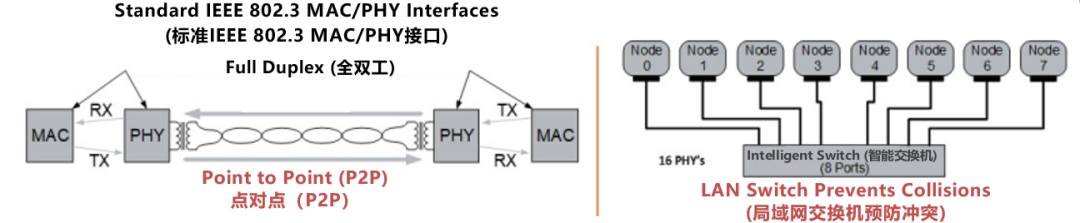
图5. 标准以太网下避免冲突
10BASE-T1S 局域网(图4)具有与传统局域网类似的优点,任何节点可以发送和接收以太网帧(不同时)。图5的右侧所示,需要16个PHY才能完成传统的以太网8节点局域网。而图4的10BASE-T1S 8节点局域网只需要8个PHY。10BASE-T1S不仅将PHY数量减少了一半,还减少了局域网中使用的电缆长度和重量。当然,传统的以太网数据速率远远超过10Mb/s,可以达到10Gb/s,甚至更高。但对于10Mb/s带宽就足够的应用来说(即工业4.0的底层和汽车IVN中的大多数边缘ECU),10BASE-T1S非常适合。
10BASE−T1S 局域网(图4)如何在没有智能交换机的情况下避免数据包冲突?答案是PLCA(物理层冲突避免机制)(参见IEEE 802.3cg第148条)。
物理层冲突避免机制
图4所示的PLCA是10BASE-T1S在多点拓扑中运行的基础。每个节点都分配与MAC地址无关的唯一的节点ID。ID#0称为PLCA协调器。其他节点是“跟随者”。只有协调器知道节点的总数,节点也包括它自己。
协调器发出触发PLCA周期的信标,该信标是20位长的唯一物理层信号。在接收到信标时,所有节点重置它们的内部“传输时机定时器”,根据IEEE802.3cg规范,该定时器默认为32位。由于1位时间在10 MB/s为100 ns,因此等于3.2µs。基于它们的ID,每个节点以循环方式轮流(或有机会)“提交”以在总线上传输,从节点0开始。
如果一个节点在轮到它的时候没有可传输的数据,它就会保持沉默。其他节点的“传输时机定时器”在识别到静默后会立即超时(默认为3.2µs),触发下一个ID '#'“提交”进行传输。如果节点在其轮次期间具有准备传输的数据,则该节点发出COMMIT,即扩展帧前导码的另一个物理层信号,当提交的节点将单个以太网帧或以太网帧的突发帧(注2)传输到总线时,所有其他节点等待。
2. 突发模式是可选的PLCA配置。默认情况下,每个节点每个定时器超时允许一个帧。
下图6说明了PLCA循环的两个例子。顶部是最小的PLCA周期,其中总线上的所有节点都没有挂起的数据放到总线上,因此它们在各自的轮次期间是静默的。相反,图6的底部PLCA周期给出了长的PLCA周期,其中每个节点有要放到总线上的待处理数据。因此,每个节点都会发出COMMIT信号,然后继续将以太网帧发送到总线上。
PLCA周期具有弹性,这种弹性100%基于进入总线的待定数据。当轮到任意节点时,如果该节点没有总线的挂起数据,最不希望的就是所有其他节点等待很长时间。例如,发生在诸如FlexRay的TDMA(时分多址)系统中。

图6. PLCA物理层冲突避免
IEEE802.3cg规范要求32位“传输时机定时器”转换为3.2µs静默。如果10BASE-T1S多点类型上的所有节点一致,则可以使用更短或更长的“传输时机定时器”位长度。
表1总结了常见的以太网标准,其中SPE(单对以太网)在汽车中普遍使用,减少了BEV(纯电动汽车)的“里程焦虑”(较低的重量)。工业4.0使用2/4对MPE(多对以太网),可以在千兆级速率下具有更远的传输距离。
表1. 多对以太网(MPE)和单对以太网(SPE)

3. 原则上,10BASE−T1L可与非屏蔽电缆一起使用,但此选项仅限于低EMC环境。
功耗
将10BASE-T1S与其他技术进行比较时,需要考虑的另一个重要因素是功耗。随着电动汽车、物联网和绿色经济的出现,在为可能拥有几十到数百个端口的系统选择物理层时,这一特性变得极其重要。
点对点以太网PHY是时钟环路系统,需要“主”和“从”设备之间的连续空闲信号,使CDR、均衡器、回声消除器和其他自适应滤波器能够工作。相反,10BASE-T1S PHY在每个接收到的数据包前导码处执行其滤波器的快速训练,并在不发送时关闭发射机。由于发射机通常是PHY中功率最大,因此与点对点PHY相比,这会显著降低功耗。考虑到10BASE-T1S不需要交换机,并且一次只有一个PHY在共享介质上传输,这种节省在系统级别上显得更为显著。
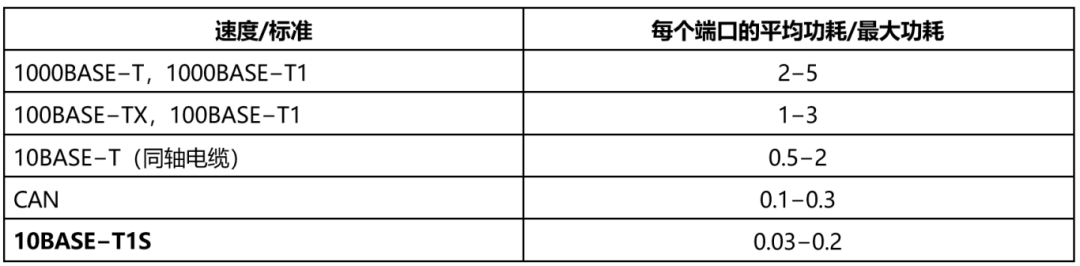
与通常需要5 V电源的CAN相比,10BASE-T1S仅需要1 VPP 发送电压。因此,它可以在3.3 V电源下工作,并且有望在将来降至1.2 V,从而在功耗方面再次获得巨大优势。
截至目前,下表总结了各种PHY的典型功耗,没有考虑点对点以太网交换机所需的额外功率以及CAN网关连接到以太网骨干网所需的附加功率。
表2
全以太网:CAN杀手/现场总线杀手?
10BASE-T1S的优点在于,它直接连接到数据链路层(L2)的现有OSI参考模型层上,位于以太网MAC层下方,如下图7所示,该图来自IEEE802.3cg规范图148-1。
MAC子层以上的层保持不变
开发人员仍然可以在较高层中使用现有软件或IP
从半导体的角度来看,只有PHY是不同的
图7强调了10BASE-T1S相对于其他二线制网络协议(如CAN、CAN-FD、现场总线、Mod-Bus、RS-485和工厂及汽车IVN上的其他非以太网)所具有的全以太网优势。您将很难找到一个比以太网更普遍、更值得信赖的连接解决方案,该解决方案在近50年的标准化、互操作性和全球市场应用中得到了验证。

图7. 摘自IEEE802.3cg规范图148−1
数据线供电(PoDL)
IEEE802.3cg规范完全支持10BASE-T1L(第104条)、T1S P2P的PoDL,但不支持10BASE-T1S多点连接。P2P拓扑对于实现PoDL是相对直接的,因为只有一个节点传送功率并且只有一个节点消耗功率,非常类似于P2P的 PoE(以太网供电)。对于PoDL,10BASE-T1S多点连接有点复杂,因为最少有8个节点,其中一个提供电源,最少有7个节点消耗功率。
然而,在某些情况下,特定客户将所谓的“工程PoDL ”成功安装到10BASE-T1S多点应用中。本白皮书发布时,IEEE802.3da规范仍在制定中,该规范将为10BASE-T1S多点应用指定非工程PoDL。下面讨论了10BASE-T1S多点连接的“工程PoDL”示例。
-
CAN与10BASE-T1S收发器设计要求对比2026-05-29 4026
-
求一种车载以太网10BASE-T1S通信的解决方案2024-01-08 2714
-
安森美10BASE-T1S芯片深度解析2026-05-13 7381
-
揭秘为什么10BASE-T1S是汽车通讯中缺失的以太网链接2021-10-20 5455
-
为何10BASE-T1S是汽车通信中缺失的以太网链路2022-08-14 2251
-
满足10BASE-T1S规范的共模扼流圈及贴片压敏电阻2023-02-22 2460
-
满足10BASE-T1S规范的共模扼流圈及片状压敏电阻2023-08-15 2048
-
10BASE-T1S车载以太网简介及网络架构2023-12-25 6608
-
车载以太网10BASE-T1S通信解决方案2024-01-10 7325
-
10BASE-T1S标准来袭:虹科新品以太网接口卡,汽车网络的新变革者?2024-08-15 1829
-
NCN26010 10Base-T1S器件配置指南(1)2024-11-14 2095
-
深度解析10BASE-T1S PLCA的多节点通信效率2025-08-01 1676
-
10BASE-T1S会是未来车载总线的第一选择吗?2025-12-08 2286
-
安森美10BASE-T1S解决方案破解车载网络瓶颈2026-04-24 2458
-
兼具诊断能力和高能效特性,安森美10BASE-T1S芯片深度解析2026-05-27 228
全部0条评论

快来发表一下你的评论吧 !
