

基于哪吒开发板部署YOLOv8模型
描述
作者:
颜国进 英特尔边缘计算创新大使
2024英特尔 “走近开发者”互动活动-哪吒开发套件免费试 用 AI 创新计划:哪吒开发板是专为支持入门级边缘 AI 应用程序和设备而设计,能够满足人工智能学习、开发、实训等应用场景。为了测试该开发板的推理性能,同时测试所推出的 OpenVINO C# API (https://github.com/guojin-yan/OpenVINO-CSharp-API) 项目能否应用到该开发板上,我们使用该开发板,结合 OpenVINO C# API 的异步推理功能,加速深度学习推理速度。
1哪吒开发板
1.1 产品简介
哪吒(Nezha)开发套件以信用卡大小(85 x 56mm)的开发板-哪吒(Nezha)为核心,哪吒采用Intel N97处理器(Alder Lake-N),最大睿频 3.6GHz,Intel UHD Graphics 内核 GPU,可实现高分辨率显示;板载 LPDDR5 内存、eMMC 存储及 TPM 2.0,配备 GPIO 接口,支持 Windows 和 Linux 操作系统,这些功能和无风扇散热方式相结合,为各种应用程序构建高效的解决方案,适用于如自动化、物联网网关、数字标牌和机器人等应用。
该开发板是类树莓派的 x86 主机,可支持 Linux Ubuntu 及完整版 Windows 操作系统。板载英特尔 N97 处理器,最高运行频率可达 3.6 GHz,且内置显卡(iGPU),板载 64GB eMMC 存储及 LPDDR5 4800MHz(4GB/8GB),支持 USB 3.0、HDMI 视频输出、3.5mm 音频接口、1000Mbps 以太网口。完全可把它作为一台 mini 小电脑来看待,且其可外接 Arduino,STM32 等单片机,扩展更多应用及各种传感器模块。
此外, 其主要接口与 Jetson Nano 载板兼容,GPIO 与树莓派兼容,能够最大限度地复用树莓派、Jetson Nano 等生态资源,无论是自动化、物联网网关、数字标牌或是摄像头物体识别、3D 打印,还是 CNC 实时插补控制都能稳定运行。可作为边缘计算引擎用于人工智能产品验证、开发;也可以作为域控核心用于机器人产品开发。
1.2 功能特点
Intel Processor N97
板载 LPDDR5 内存, 8GB
板载 eMMC 存储, 64GB
1Gigabit LAN x 1
HDMI 1.4b x 1
USB 3.2 Gen 2 (Type-A) x 3, 10针 USB 2.0 x 2/UART x 1
40针 GPIO x 1
12V 直流输入, 5A
TPM 2.0
下图为哪吒开发板产品介绍图片:

2环境配置
2.1NET 8.0 安装
进入微软官网下载地址:
https://dotnet.microsoft.com/zh-cn/download
显示如下页面直接下载即可:

下载完成过后,右击以管理员方式运行即可,进入一下页面后,直接点击安装,按照默认方式安装即可:

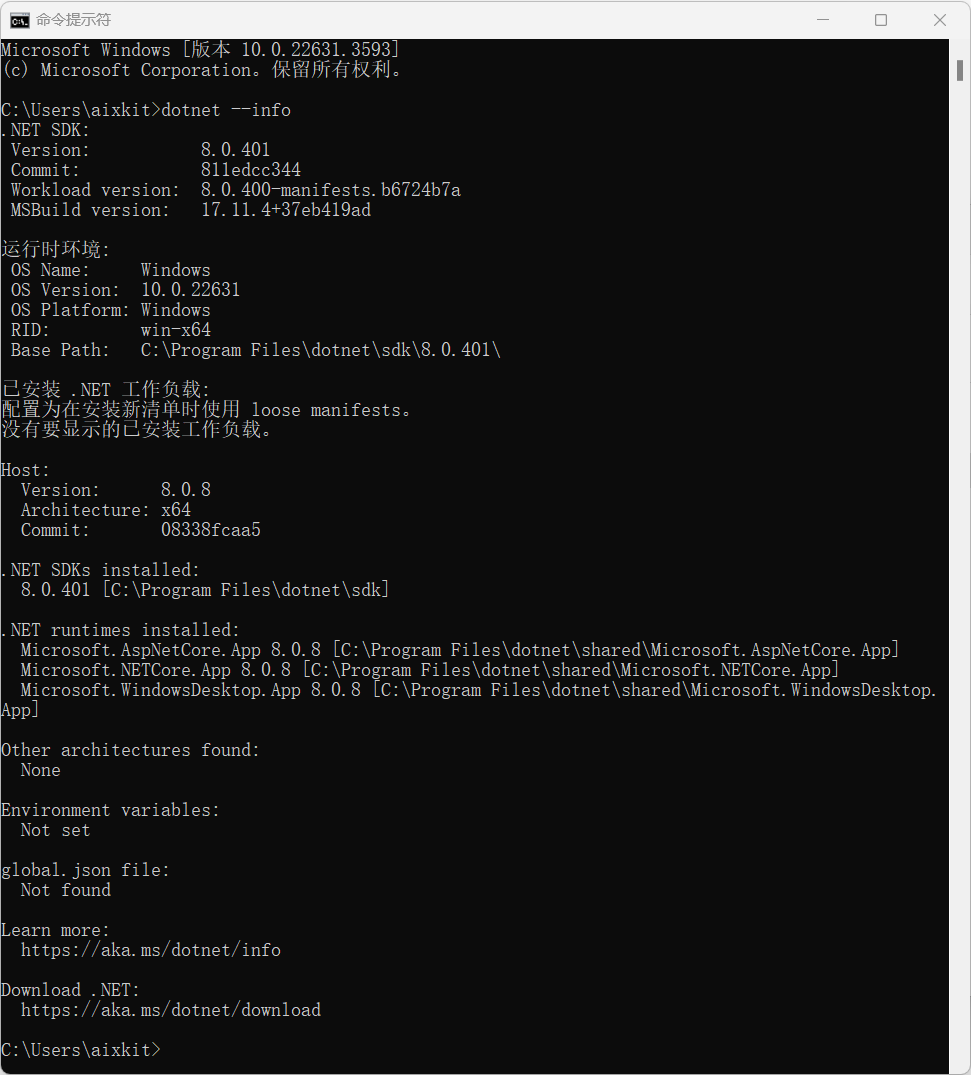
安装完成后,在 CMD 中输入 dotnet --info 指令,查看是否安装成功:
2.2 VS Code 配置 C# 环境
VS Code 安装较为简单,大家直接网上下载安装包安装即可,此处不做太多的赘述。进入 VS Code,在扩展中,依次安装一下插件:
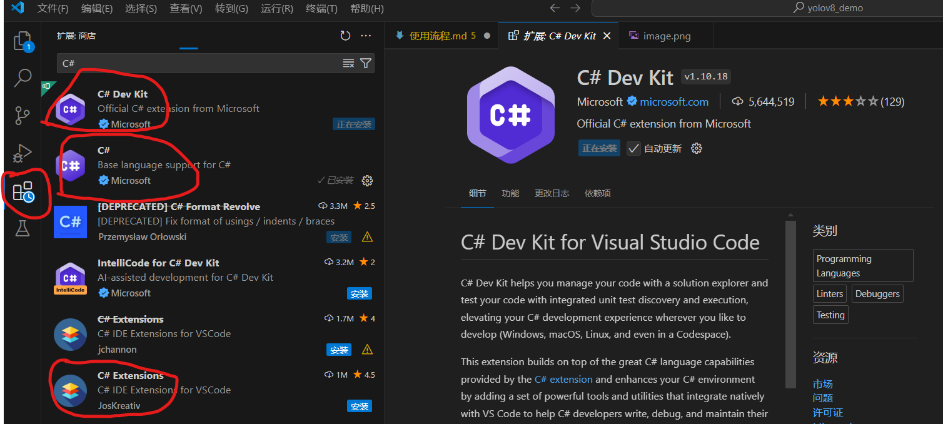
安装完成后,便可以进行 C# 项目编辑。
3创建并配置 YOLOv8 推理项目
3.1 创建 YOLOv8 推理项目
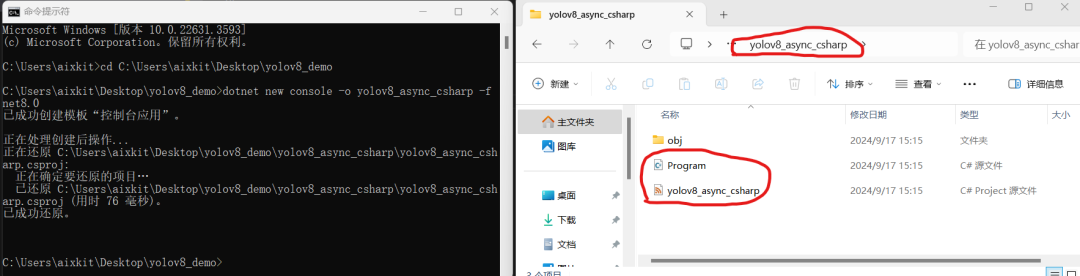
此处我们使用 CMD 创建项目,首先输入以下指令:
dotnet new console -o yolov8_async_csharp -f net8.0
输入指令后,结果如下图所示:
3.2 配置 YOLOv8 推理项目
该项目中需要配置 OpenCV 和 OpenVINO 依赖,其中 OpenCV 我们在 C# 使用的是 OpenCvSharp4,而 OpenVINO 就是使用的我们开发的[OpenVINO C# API] (https://github.com/guojin-yan/OpenVINO-CSharp-API) 项目,该项目均可以通过 NUGET 安装,在该项目中,输入以下指令,进行以来安装:
OpenCvSharp4 安装指令:
dotnet add package OpenCvSharp4 --version 4.9.0.20240103 dotnet add package OpenCvSharp4.runtime.win --version 4.9.0.20240103
OpenVINO C# API 安装指令:
dotnet add package OpenVINO.CSharp.API --version 2024.3.0.2 dotnet add package OpenVINO.runtime.win --version 2024.3.0.1 dotnet add package OpenVINO.CSharp.API.Extensions.OpenCvSharp --version 1.0.6.1
4编写推理代码
下面为该项目所使用的所有代码,为了提高推理速度,此处使用的为异步推理过程。
using OpenCvSharp.Dnn;
using OpenCvSharp;
using OpenVinoSharp;
using OpenVinoSharp.Extensions.result;
using OpenVinoSharp.Extensions.process;
using System.Diagnostics;
using OpenVinoSharp.preprocess;
namespace openvino_async_csharp
{
internal class Program
{
static void Main(string[] args)
{
Console.WriteLine("Hello, World!");
yolov8_async_det();
}
static void yolov8_async_det()
{
string video_path = "video.mp4";
string model_path = "yolov8s.onnx";
Core core = new Core();
Model model = core.read_model(model_path);
CompiledModel compiled_model = core.compile_model(model, "GPU.0");
VideoCapture capture = new VideoCapture(video_path);
if (!capture.IsOpened())
{
Console.WriteLine("ERROR: 视频无法打开");
return;
}
List requests = new List { compiled_model.create_infer_request(), compiled_model.create_infer_request() };
Mat frame = new Mat();
capture.Read(frame);
float factor = 0f;
float[] input_data = preprocess(frame, out factor);
requests[0].get_input_tensor().set_data(input_data);
requests[0].start_async();
Stopwatch sw = new Stopwatch();
float[] total_infs = new float[3];
while (true)
{
Mat next_frame = new Mat();
if (!capture.Read(next_frame))
{
break;
}
sw.Restart();
input_data = preprocess(frame, out factor);
requests[1].get_input_tensor().set_data(input_data);
sw.Stop();
total_infs[0] = sw.ElapsedMilliseconds;
sw.Restart();
requests[1].start_async();
requests[0].wait();
sw.Stop();
total_infs[1] = sw.ElapsedMilliseconds;
sw.Restart();
float[] output_data = requests[0].get_output_tensor().get_data(8400 * 84);
DetResult result = postprocess(output_data, factor);
sw.Stop();
total_infs[2] = sw.ElapsedMilliseconds;
Cv2.PutText(frame, "PreProcess: " + (1000.0 / total_infs[0]).ToString("0.00") + "FPS " + (total_infs[0]).ToString("0.00") + "ms",
new Point(20, 40), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Cv2.PutText(frame, "Inference: " + (1000.0 / total_infs[1]).ToString("0.00") + "FPS " + (total_infs[1]).ToString("0.00") + "ms",
new Point(20, 70), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Cv2.PutText(frame, "PostProcess: " + (1000.0 / total_infs[2]).ToString("0.00") + "FPS " + (total_infs[2]).ToString("0.00") + "ms",
new Point(20, 100), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Cv2.PutText(frame, "Total: " + (1000.0 / (total_infs[0] + total_infs[1] + total_infs[2])).ToString("0.00")
+ "FPS " + ((total_infs[0] + total_infs[1] + total_infs[2])).ToString("0.00") + "ms",
new Point(20, 130), HersheyFonts.HersheyPlain, 2, new Scalar(255, 0, 255), 2);
Mat res_mat = Visualize.draw_det_result(result, frame);
Cv2.ImShow("Result", res_mat);
Cv2.WaitKey(10);
swap(requests);
frame = next_frame;
}
}
public static float[] preprocess(Mat img, out float factor)
{
Mat mat = new Mat();
Cv2.CvtColor(img, mat, ColorConversionCodes.BGR2RGB);
mat = Resize.letterbox_img(mat, 640, out factor);
mat = Normalize.run(mat, true);
return Permute.run(mat);
}
public static DetResult postprocess(float[] result, float factor)
{
// Storage results list
List positionBoxes = new List();
List classIds = new List();
List confidences = new List();
// Preprocessing output results
for (int i = 0; i < 8400; i++)
{
for (int j = 4; j < 84; j++)
{
float source = result[8400 * j + i];
int label = j - 4;
if (source > 0.2)
{
float maxSource = source;
float cx = result[8400 * 0 + i];
float cy = result[8400 * 1 + i];
float ow = result[8400 * 2 + i];
float oh = result[8400 * 3 + i];
int x = (int)((cx - 0.5 * ow) * factor);
int y = (int)((cy - 0.5 * oh) * factor);
int width = (int)(ow * factor);
int height = (int)(oh * factor);
Rect box = new Rect(x, y, width, height);
positionBoxes.Add(box);
classIds.Add(label);
confidences.Add(maxSource);
}
}
}
DetResult re = new DetResult();
int[] indexes = new int[positionBoxes.Count];
CvDnn.NMSBoxes(positionBoxes, confidences, 0.2f, 0.5f, out indexes);
for (int i = 0; i < indexes.Length; i++)
{
int index = indexes[i];
re.add(classIds[index], confidences[index], positionBoxes[index]);
}
return re;
}
public static void swap(List requests)
{
//(requests[0], requests[1]) = (requests[1], requests[0]);
var tmp = requests[0];
requests[0] = requests[1];
requests[1] = tmp;
}
}
}
打开创建的项目,编辑 Program.cs 文件,将上述代码替换该文件中的代码即可。
5项目编译与运行
输入以下指令后进行项目编译:
dotnet build --configuration Release
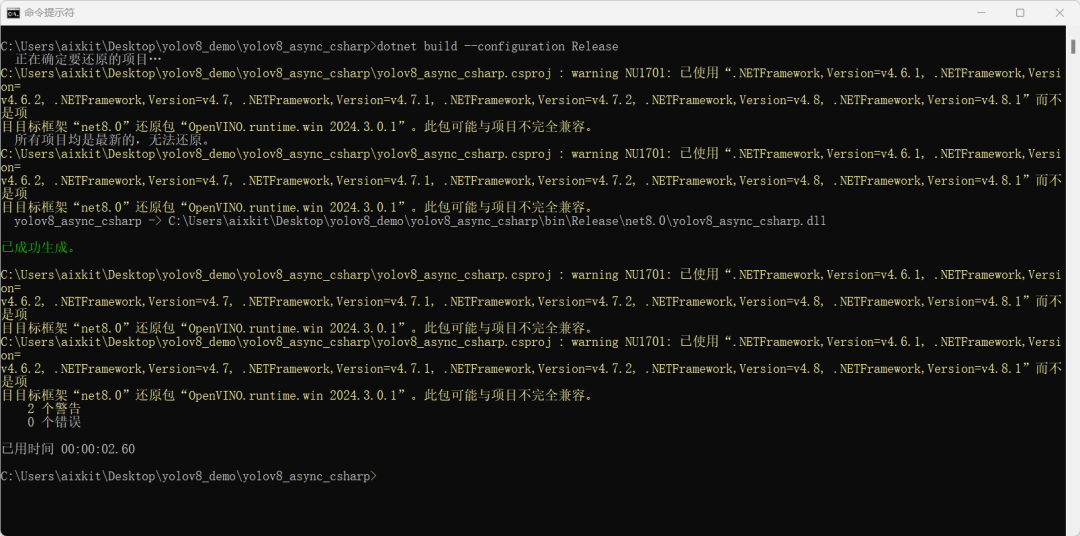
通过上图可以看出,该项目编译成功,未出现任何问题,接下来输入以下指令进行项目运行:
dotnet run --configuration Release
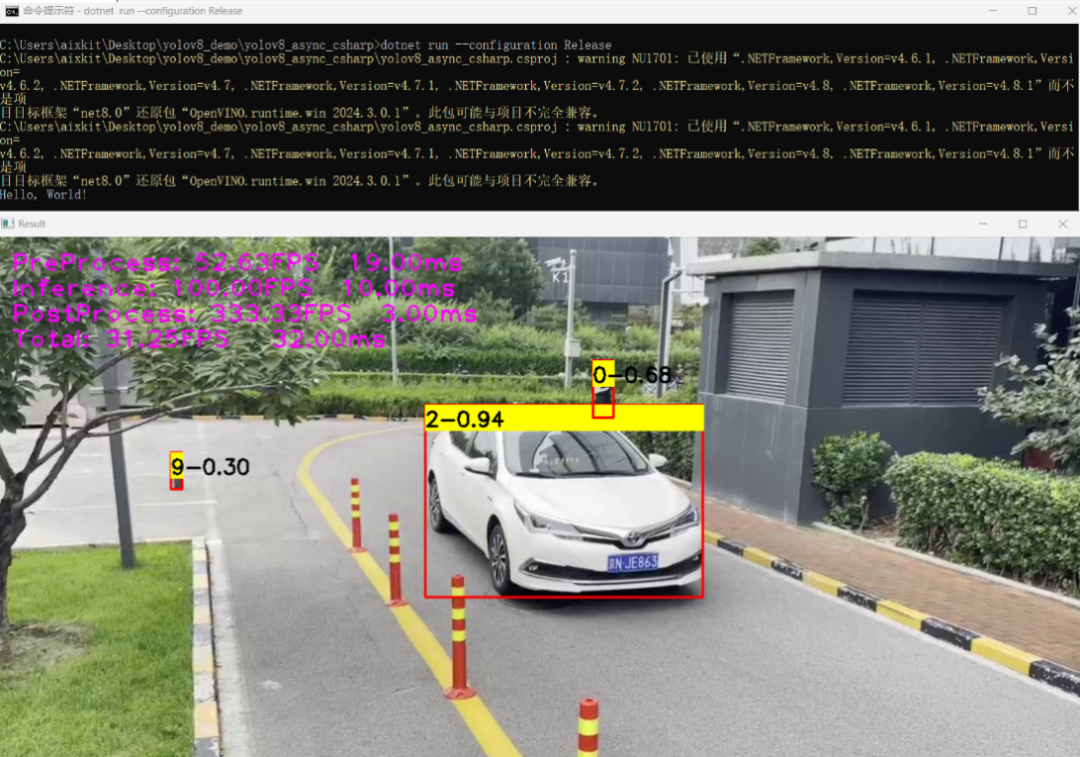
上图为运行后的输出和推理效果,可以看出使用异步推理后,可以实现20帧以上的推理速度。
为了对比推理效果,此处还开展了同步推理实现,异步推理速度可以实现到 25FPS 以上,而同步推理只能达到 12FPS 左右,其推理速度提升了一倍,且满足视频的实时推理要求。
6总结
在该项目中,我们使用哪吒开发板套件,通过前期推出的 OpenVINO C# API 项目,实现了在开发板环境下部署 YOLOv8 模型,并进行了视频推理测试。在使用哪吒开发板套件的 IGPU 设备进行推理时,其推理速度平均可以达到 25FPS 以上,可以实现视频实时推理。
-
迅为RK3576开发板 + YOLOv8实现实时目标检测全流程2026-07-20 120
-
【飞凌嵌入式RV1126B开发板试用体验】+ 5. YOLOv8目标识别部署2026-03-23 6785
-
使用ROCm™优化并部署YOLOv8模型2025-09-24 1293
-
RV1126 yolov8训练部署教程2025-04-16 1971
-
RK3576 yolov8训练部署教程2025-04-02 2348
-
基于OpenCV DNN实现YOLOv8的模型部署与推理演示2024-03-01 3776
-
基于YOLOv8的自定义医学图像分割2023-12-20 2108
-
【爱芯派 Pro 开发板试用体验】yolov8模型转换2023-11-20 1826
-
三种主流模型部署框架YOLOv8推理演示2023-08-06 4281
-
在AI爱克斯开发板上用OpenVINO™加速YOLOv8-seg实例分割模型2023-06-05 2322
-
AI爱克斯开发板上使用OpenVINO加速YOLOv8目标检测模型2023-05-26 3079
-
在AI爱克斯开发板上用OpenVINO™加速YOLOv8目标检测模型2023-05-12 2947
-
在AI爱克斯开发板上用OpenVINO™加速YOLOv8分类模型2023-05-05 2129
-
YOLOv8自定义数据集训练到模型部署推理简析2023-03-24 12038
全部0条评论

快来发表一下你的评论吧 !
