

 CW32L010学习笔记
CW32L010学习笔记
电子说
描述
CW32学习开发笔记
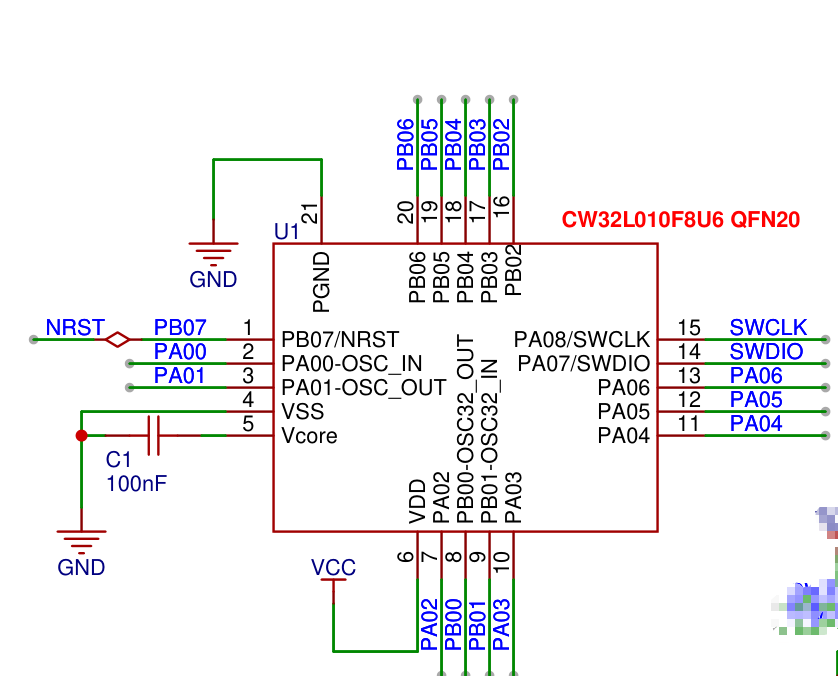
硬件原理图:
主芯片
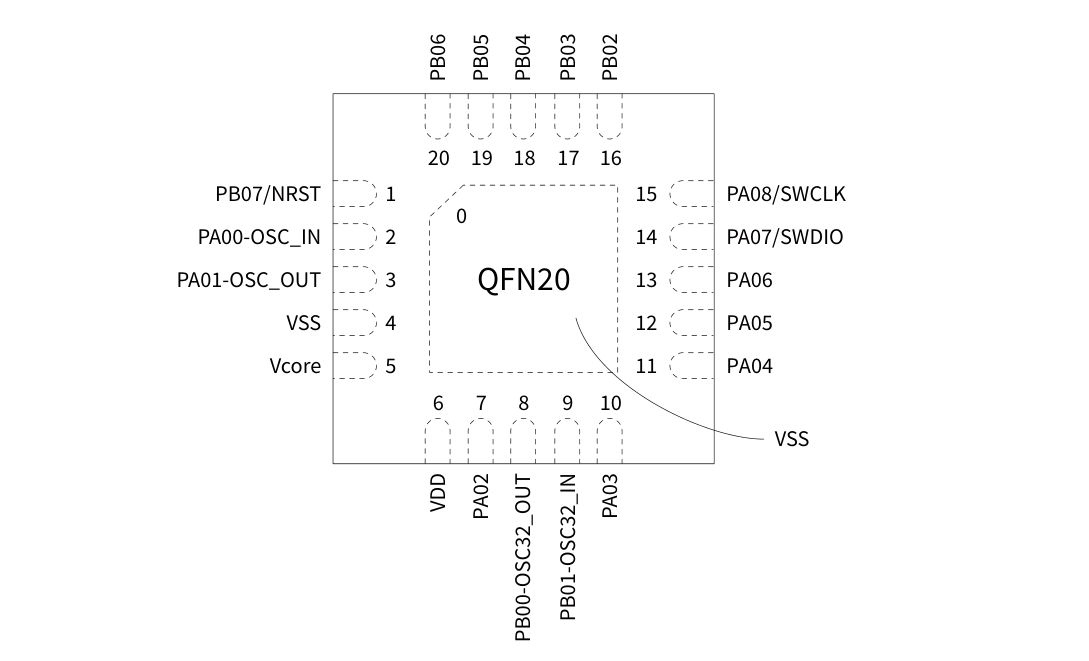
引脚封装图:
** CW32L010 是基于 eFlash 的单芯片低功耗微控制器,集成了主频高达 48MHz 的 ARM® Cortex®-M0+ 内核、**
高速嵌入式存储器(多至 64K 字节 FLASH 和多至 4K 字节 SRAM)以及一系列全面的增强型外设和 I/O 口。
所有型号都提供全套的通信接口(二路 UART、一路 SPI 和一路 I2C)、12 位高速 ADC、四组通用和基本定时器、
一组低功耗定时器以及一组高级控制 PWM 定时器。
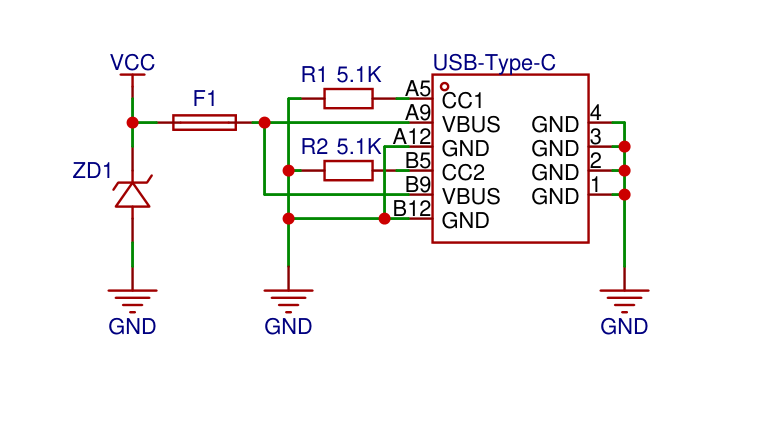
供电电源
** 使用type-c直接供电即可,不需要再接其他电源转换芯片,CW32L010 可以在 -40℃到 85℃的温度范围内工作,供电电压宽达 1.62V ~ 5.5V。支持 Sleep 和 DeepSleep两种低功耗工作模式。**
复位电路
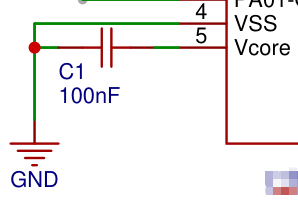
滤波电路
内部稳压

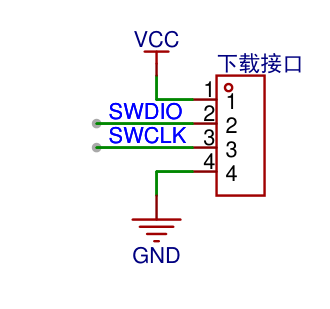
调试下载
默认使用SWD接口下载程序,原理图如下:
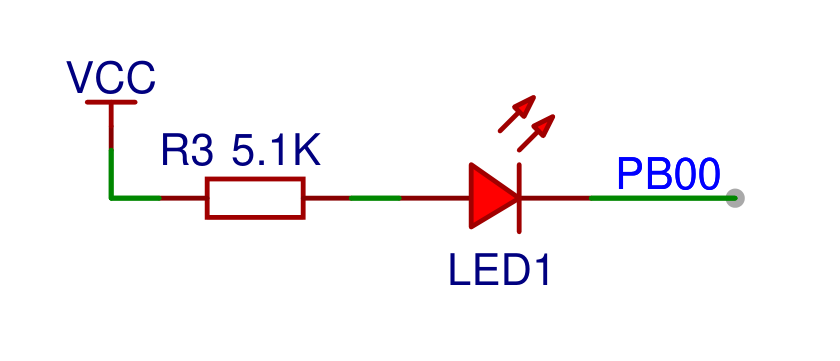
板载指示灯
用于查看系统运行状态,原理图如下:
软件功能
工程创建
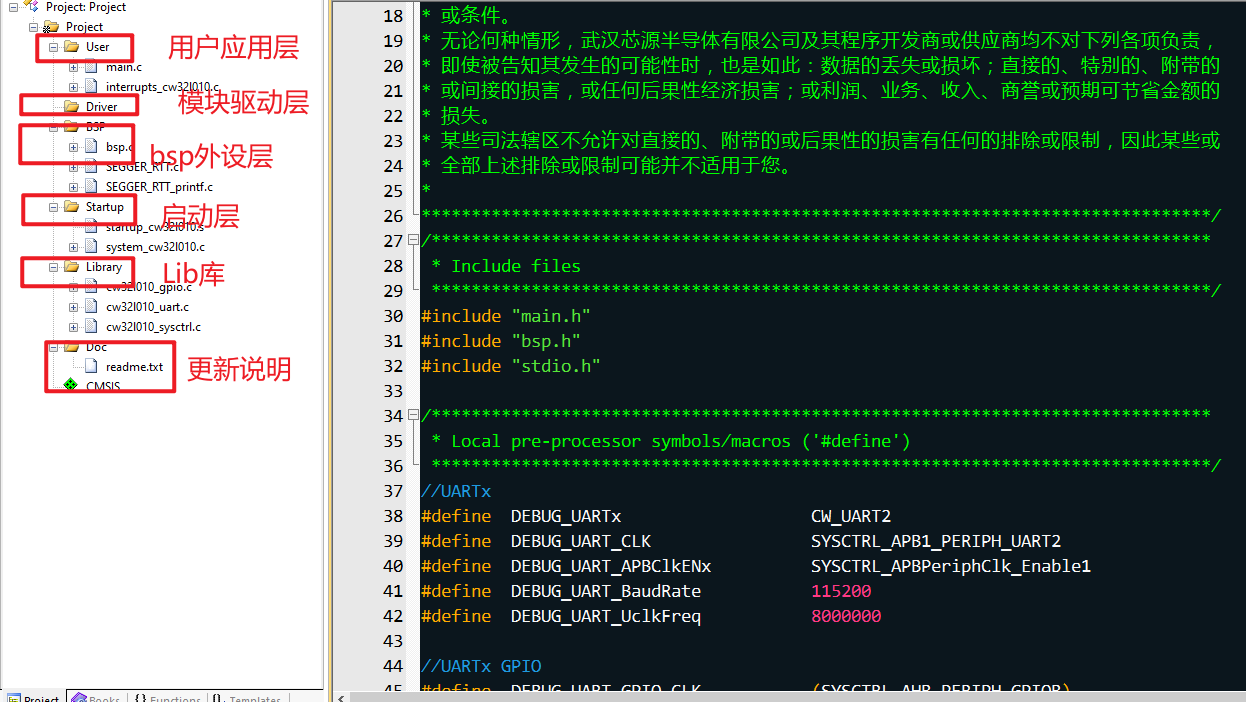
具体如何创建工程就不所说明了,官方例程都有说明,我主要说下的我的目录结构设计:
串口通讯
** 内部集成 2 个通用异步收发器 (UART),支持异步全双工、同步半双工和单线半双工模式,支持硬件数据流控**
和多机通信,还支持 LIN(局域互连网络);可编程数据帧结构,可以通过小数波特率发生器提供宽范围的
波特率选择。内置定时器模块,支持等待超时检测、接收空闲检测、自动波特率检测和通用定时功能。
UART 控制器工作在双时钟域下,允许在深度休眠模式下进行数据的接收,接收完成中断可以唤醒 MCU 回到
运行模式。注意:仅 UART1 支持 LIN 和定时器功能;UART2 可通过片内外设互联与 BTIM/GTIM/ATIM 的从模式协同工
作实现超时定时器相关功能。我们接着实现串口通讯功能;
- 1.串口功能硬件引脚

使用串口2来是实现通讯,再看引脚的复用功能。

- 2.代码实现
#include "bsp_uart2.h"
#include "cw32l010_gpio.h"
#include "cw32l010_uart.h"
#include "stdio.h"
#include "cw32l010_sysctrl.h"
//UARTx
#define DEBUG_UARTx CW_UART2
#define DEBUG_UART_CLK SYSCTRL_APB1_PERIPH_UART2
#define DEBUG_UART_APBClkENx SYSCTRL_APBPeriphClk_Enable1
#define DEBUG_UART_BaudRate 115200
#define DEBUG_UART_UclkFreq HSIOSC_VALUE //串口全速运行
//UARTx GPIO
#define DEBUG_UART_GPIO_CLK (SYSCTRL_AHB_PERIPH_GPIOB)
#define DEBUG_UART_TX_GPIO_PORT CW_GPIOB
#define DEBUG_UART_TX_GPIO_PIN GPIO_PIN_5
#define DEBUG_UART_RX_GPIO_PORT CW_GPIOB
#define DEBUG_UART_RX_GPIO_PIN GPIO_PIN_6
//GPIO AF
#define DEBUG_UART_AFTX PB05_AFx_UART2TXD()
#define DEBUG_UART_AFRX PB06_AFx_UART2RXD()
static void UART_Configuration(void)
{
// //外设时钟使能,放在外设里面自己进行使能
DEBUG_UART_APBClkENx(DEBUG_UART_CLK, ENABLE);
UART_InitTypeDef UART_InitStructure = {0};
UART_InitStructure.UART_BaudRate = DEBUG_UART_BaudRate;
UART_InitStructure.UART_Over = UART_Over_16;
UART_InitStructure.UART_Source = UART_Source_PCLK;
UART_InitStructure.UART_UclkFreq = DEBUG_UART_UclkFreq;
UART_InitStructure.UART_StartBit = UART_StartBit_FE;
UART_InitStructure.UART_StopBits = UART_StopBits_1;
UART_InitStructure.UART_Parity = UART_Parity_No ;
UART_InitStructure.UART_HardwareFlowControl = UART_HardwareFlowControl_None;
UART_InitStructure.UART_Mode = UART_Mode_Rx | UART_Mode_Tx;
UART_Init(DEBUG_UARTx, &UART_InitStructure);
}
/**
* @brief 配置GPIO
*
*/
static void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
//外设时钟使能,放在外设里面自己进行使能
SYSCTRL_AHBPeriphClk_Enable(DEBUG_UART_GPIO_CLK, ENABLE);
GPIO_WritePin(DEBUG_UART_TX_GPIO_PORT, DEBUG_UART_TX_GPIO_PIN,GPIO_Pin_SET); // 设置TXD的默认电平为高,空闲
GPIO_InitStructure.Pins = DEBUG_UART_TX_GPIO_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_Init(DEBUG_UART_TX_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.Pins = DEBUG_UART_RX_GPIO_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_INPUT_PULLUP;
GPIO_Init(DEBUG_UART_RX_GPIO_PORT, &GPIO_InitStructure);
//UART TX RX 复用
DEBUG_UART_AFTX;
DEBUG_UART_AFRX;
}
void UART2_Configuration(void)
{
UART_Configuration();
GPIO_Configuration();
}
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker- >Libraries- >Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
/**
* @brief Retargets the C library printf function to the UART.
*
*/
PUTCHAR_PROTOTYPE
{
UART_SendData_8bit(DEBUG_UARTx, (uint8_t)ch);
while (UART_GetFlagStatus(DEBUG_UARTx, UART_FLAG_TXE) == RESET);
return ch;
}
size_t __write(int handle, const unsigned char * buffer, size_t size)
{
size_t nChars = 0;
if (buffer == 0)
{
/*
* This means that we should flush internal buffers. Since we
* don't we just return. (Remember, "handle" == -1 means that all
* handles should be flushed.)
*/
return 0;
}
for (/* Empty */; size != 0; --size)
{
UART_SendData_8bit(DEBUG_UARTx, *buffer++);
while (UART_GetFlagStatus(DEBUG_UARTx, UART_FLAG_TXE) == RESET);
++nChars;
}
return nChars;
}
/******************************************************************************
* EOF (not truncated)
******************************************************************************/
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %drn", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
- 3.编写打印测试函数
static void Printf_Function(void)
{
DEBUG_LOG("rn");
DEBUG_LOG(" Compile time:");
DEBUG_LOG(__DATE__);
DEBUG_LOG(" ");
DEBUG_LOG(__TIME__);
DEBUG_LOG("rn+-------------------+rn");
DEBUG_LOG("%s,%s,%d,%srn", __FUNCTION__,__FILE__,__LINE__,__DATE__);
DEBUG_LOG("rn+-------------------+rn");
}
- 4.查看串口终端信息
使用MobaXterm终端工具查看:
- 5.注意点
为了让代码支持GNU扩展,keil设置需要注意:
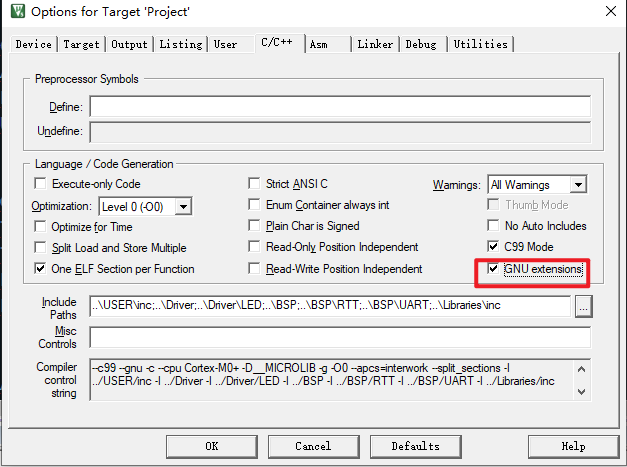
同时,串口打印的时候,添加头文件"stdio.h";
GPIO口输入输出
根据板载资源,使用板载的LED来测试。前面硬件说明的时候提到,使用的引脚为PB00;就直接上代码了。
- 1.编写驱动代码
#include "drv_led.h"
// 初始化 LED 引脚
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__SYSCTRL_GPIOB_CLK_ENABLE();
GPIO_InitStruct.IT = GPIO_IT_NONE;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pins = LED_GPIO_PINS;
GPIO_Init(LED_GPIO_PORT, &GPIO_InitStruct);
}
// 控制 LED 开关
void LED_Control(GPIO_PinState state)
{
GPIO_WritePin(LED_GPIO_PORT, LED_GPIO_PINS,state);
}
// 切换 LED 状态
void LED_Toggle(void) {
GPIO_TogglePin(LED_GPIO_PORT, LED_GPIO_PINS);
}
// 读取 LED 状态
int LED_Read(void) {
return GPIO_ReadPin(LED_GPIO_PORT, LED_GPIO_PINS) == GPIO_Pin_SET ? 1 : 0;
}
// 定义并初始化 LED 操作结构体实例
LED_Ops_t myLED = {
.init = LED_Init,
.control = LED_Control,
.toggle = LED_Toggle,
.read = LED_Read
};
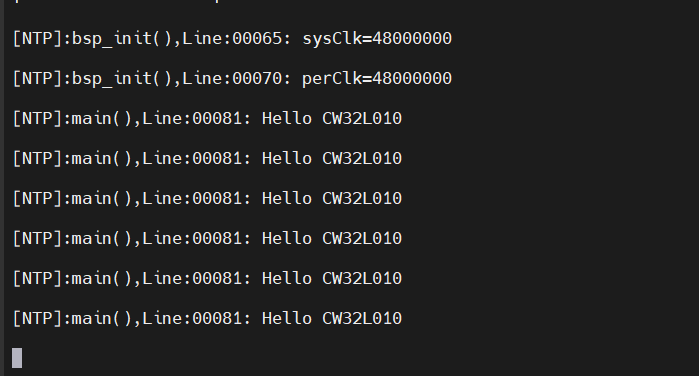
- 2.编写测试程序
int32_t main(void)
{
bsp_init();
driver_init();
while(1)
{
SysTickDelay(1000);
myLED.toggle();
}
}
调试下载之后,可直接观察板载LED灯是否在循环闪烁。
调试等级
- 1.直接上代码,调试等级头文件;
#ifndef __LOG_H
#define __LOG_H
#include < stdio.h >
#include < stdlib.h >
#include < string.h >
#include < stdarg.h >
#define GLOB_LOG_EVEL LOG_DEBUG
typedef enum {
FALSE,
TRUE
} status;
// 定义日志级别
typedef enum {
LOG_DEBUG,
LOG_INFO,
LOG_WARNING,
LOG_ERROR
} LogLevel;
//extern LogMsg lmsg;
// 颜色
#define Blue "�33[34m" // Blue
#define Green "�33[32m" // Green
#define Yellow "�33[33m" // Yellow
#define Red "�33[31m" // Red
#define Reset "�33[0m" // Reset color
// 记录日志的宏定义
#define LOG_MESSAGE(format, ...) printf("[NTP]:%s(),Line:%05d: " format "rn", __FUNCTION__, __LINE__, ##__VA_ARGS__)
void LOG_MSG(LogLevel level, const char *message);
#endif
- 2.功能函数实现文件:
#include "log.h"
// 日志输出函数
void LOG_MSG(LogLevel level, const char *message) {
switch (level) {
case LOG_DEBUG:
printf(Blue "DEBUG: %s" Reset "rn", message);
break;
case LOG_INFO:
printf(Green "INFO: %s" Reset "rn", message);
break;
case LOG_WARNING:
printf(Yellow "WARNING: %s" Reset "rn", message);
break;
case LOG_ERROR:
printf(Red "ERROR: %s" Reset "rn", message);
break;
default:
printf("UNKNOWN: %sn", message);
break;
}
}
- 3.编写测试函数
/*宏定义错误码信息*/
static void Error_Code_Info(void)
{
DEBUG_LOG("%d", SYSTEM_OK);
DEBUG_LOG("%d", SYSTEM_ERR_E_1);
DEBUG_LOG("%d", SYSTEM_ERR_E_2);
DEBUG_LOG("%d", SYSTEM_ERR_MQTT_INFO_ERROR);
LOG_MSG(LOG_DEBUG, "This is a debug message");
LOG_MSG(LOG_INFO, "This is an info message");
LOG_MSG(LOG_WARNING, "This is a warning message");
LOG_MSG(LOG_ERROR, "This is an error message");
}
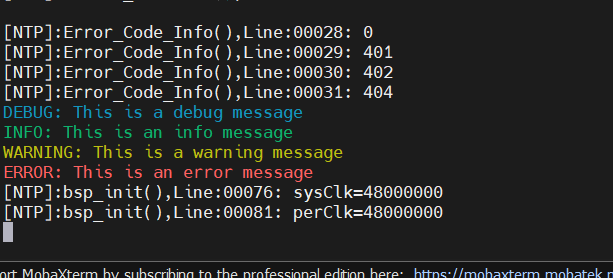
- 4.终端输出
串口中断
CW32单片机的串口有好几种工作方式,异步全双工,同步半双工,单线半双工,由于没有DMA通道,为了避免频繁的进入中断,采用串口接收中断,串口查询发送方式实现收发;
配置简单队列消息,实现方式如下:
- 1、定义队列结构
#define myQ2_SIZE 512
#define RxBuffer2_SIZE myQ2_SIZE
typedef volatile struct
{
uint8_t m_getIdx;
uint8_t m_putIdx;
uint8_t m_entry[ myQ2_SIZE ];
} myQ2;
extern myQ2 volatile RxBuffer2;
extern myQ2 volatile TxBuffer2;
void UART2_Buffer_Init(void);
- 2、初始化队列结构
myQ2 volatile RxBuffer2;
myQ2 volatile TxBuffer2;
void UART2_Buffer_Init(void)
{
CBUF_Init(RxBuffer2);
CBUF_Init(TxBuffer2);
}
- 3、使能串口接收中断
void NVIC_Configuration(void)
{
//优先级,无优先级分组
NVIC_SetPriority(DEBUG_UART_IRQ, 0);
//UARTx中断使能
NVIC_EnableIRQ(DEBUG_UART_IRQ);
//使能UARTx RC中断
UART_ITConfig(DEBUG_UARTx, UART_IT_RC, ENABLE);
UART_ClearITPendingBit(CW_UART2, UART_IT_RC);
}
- 4、编写测试函数,实现串口功能收发
int32_t main(void)
{
bsp_init();
driver_init();
while(1)
{
uint16_t dataLen=0;
dataLen = CBUF_Len(RxBuffer2);
if(dataLen!=0)
{
//拷贝数据
memcpy((char*)TxBuffer2.m_entry,(char*)RxBuffer2.m_entry,dataLen);
//查询发送数据
UART_SendBuf_Polling(CW_UART2,TxBuffer2.m_entry,dataLen);
USART2_Clear();
}
SysTickDelay(1000);
myLED.toggle();
}
}
- 5、查看串口终端收发
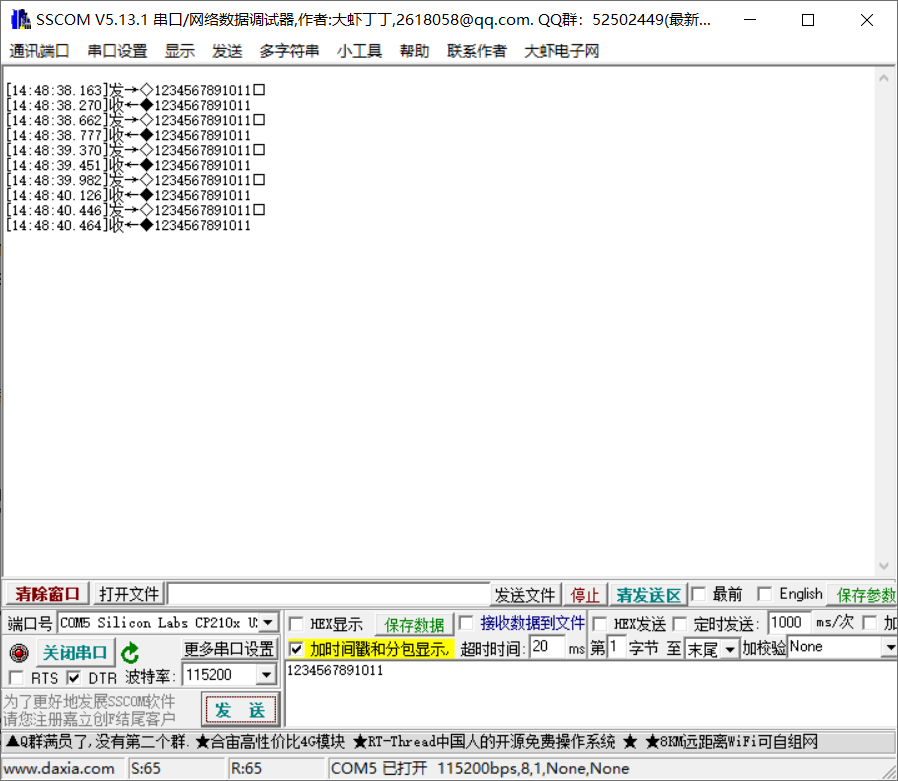
从截图可以看出,当前收发数据一致;
控制台Shell
下面介绍下开源项目是 letter-shell,一个功能强大的嵌入式shell,letter shell 3.x是一个C语言编写的,可以嵌入在程序中的嵌入式shell,通俗一点说就是一个串口命令行,可以通过命令行调用、运行程序中的函数。目前 letter-shell 3.0版本支持的功能有:
- 命令自动补全
- 快捷键功能定义
- 命令权限管理
- 用户管理
- 变量支持
项目地址: [https://github.com/NevermindZZT/letter-shell]
移植过程:
- 1.复制源码到工程中:
- 2.在自定义接口
shell_port.c中实现自己的串口读写函数
#include "shell.h"
#include "main.h"
#include "bsp_uart2.h"
#include "shell_port.h"
Shell shell;
char shellBuffer[512];
/**
* @brief 用户shell写
*
* @param data 数据
* @param len 数据长度
*
* @return short 实际写入的数据长度
*/
short userShellWrite(char *data, unsigned short len)
{
UART_SendBuf_Polling(CW_UART2,(uint8_t *)data, len);
return len;
}
/**
* @brief 用户shell读
*
* @param data 数据
* @param len 数据长度
*
* @return short 实际读取到
*/
short userShellRead(char *data, unsigned short len)
{
return UART2_GetString((uint8_t *)data, len);
}
/**
* @brief 用户shell上锁
*
* @param shell shell
*
* @return int 0
*/
int userShellLock(Shell *shell)
{
return 0;
}
/**
* @brief 用户shell解锁
*
* @param shell shell
*
* @return int 0
*/
int userShellUnlock(Shell *shell)
{
return 0;
}
/**
* @brief 用户shell初始化
*
*/
void userShellInit(void)
{
//注册自己实现的写函数
shell.write = userShellWrite;
//shell.read = userShellRead;
//调用shell初始化函数
shellInit(&shell, shellBuffer, 512);
}
- 3.在终端函数中定义
对于裸机环境,在主循环中调用shellTask,或者在接收到数据时,调用shellHandler,我这里在中断中调用
void UART2_IRQHandler(void)
{
/* USER CODE BEGIN */
uint8_t TxRxBuffer;
if (UART_GetITStatus(CW_UART2, UART_IT_RC) != RESET)
{
/*使用简易队列进行接收数据*/
TxRxBuffer = UART_ReceiveData_8bit(CW_UART2);
shellHandler(&shell,TxRxBuffer);
CBUF_Push(RxBuffer2, TxRxBuffer);
UART_ClearITPendingBit(CW_UART2, UART_IT_RC);
}
/* USER CODE END */
}
- 4.调用初始化shell
userShellInit();
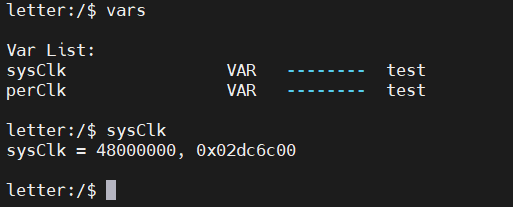
- 5.串口终端实现结果
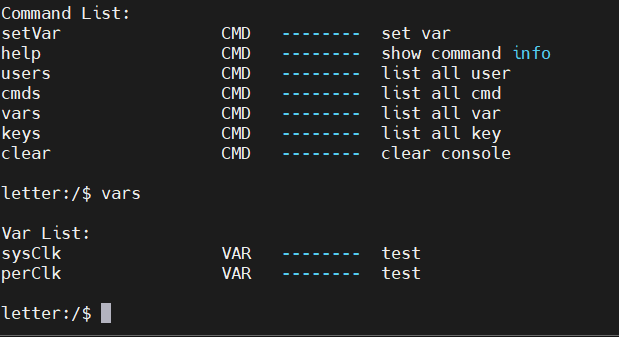
查看当前系统时钟:
其他实现方式,参考官方文档说明。
审核编辑 黄宇
-
CW32L010的学习笔记2025-12-01 316
-
CW32L010的2种启动模式介绍2025-11-28 203
-
CW32L010的串口输出2025-11-27 176
-
CW32L010的内部框图2025-11-21 187
-
CW32L010用jlink能去除读保护吗?2025-11-20 229
-
CW32L010系列的特点2025-11-12 215
-
基于CW32L010的高性能温控器方案2025-07-02 734
-
基于CW32L010单片机的扫振一体电动牙刷应用方案2025-06-17 1181
-
武汉芯源半导体CW32L010在两轮车仪表的应用介绍2025-05-13 833
-
CW32L010 Motor Control Driver无刷电机驱动板上手体验2024-12-26 2286
-
【CW32L010 Mini Board 测评】简介、点灯2024-11-17 3178
-
CW32L010 新品初体验2024-11-14 1944
全部0条评论

快来发表一下你的评论吧 !
