

软件定义车辆加速推进汽车电子技术的未来发展
描述
汽车原始设备制造商 (OEM) 持续致力于改善乘员的体验、简化无线更新、降低设计和制造的成本、收集更多的车辆数据并创造新的收入来源。然而,当今基于域的车辆架构无法轻松有效地满足这些需求,这也促使制造商转向软件定义车辆和区域架构。通过集中管理软件并将硬件与软件分离,软件定义车辆成为实现更智能、更安全和更节能车辆过程中的下一阶段目标。
本次为大家介绍的是《软件定义车辆加速推进汽车电子技术的未来发展》白皮书。本文将讨论具有区域架构的软件定义车辆如何推动开发更智能、 更安全、更节能的车辆。通过集中管理软件并将硬件与软件分离,这种车辆可以更轻松地进行更新、降低成本并提供新功能。
内容概览
基于域的车辆和软件定义车辆
了解基于域的车辆架构与软件定义车辆架构之间的差异。
如今,基于域的架构在提供可扩展软件方面效率低下,而汽车制造商可以通过无线更新轻松维护这些软件。如果车辆功能可能需要跨多个域进行通信和控制,对车辆功能的控制进行细分将使软件开发变得复杂化,更新这些系统的软件具有挑战性。相比之下,采用区域架构的软件定义车辆,通过集中软件简化无线更新,通过将车辆硬件与高层应用软件分离来实现通过软件添加新功能的灵活性,并在不同车型和饰件之间提供了更具成本效益的可扩展性。
图 1 展示了一个区域架构示例,该架构将软件集中在中央计算系统中,并实施区域控制模块以汇总数据、驱动负载和执行本地配电。
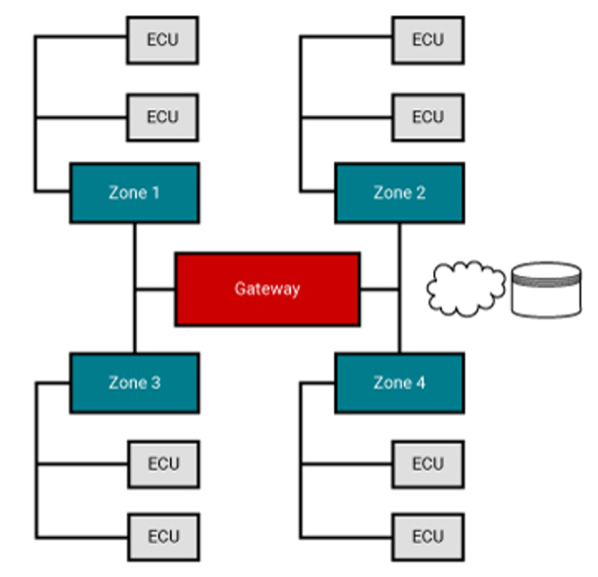
图 1:车辆区域架构图
软件定义车辆支持的新技术
了解软件定义车辆如何增强数字孪生等技术以优化车辆性能。
软件定义车辆为 OEM提供了新技术和收入来源。随着车辆不断集成更多的电子器件和传感器,车辆性能、故障场景和驾驶员偏好数据比以往任何时候都更容易获得。软件定义车辆可以简化车辆数据收集过程并安全共享车辆数据,有助于进一步改善数字孪生和车联网 (V2X) 功能。
利用数字孪生功能(真实系统的虚拟表示),软件定义车辆可将数据共享到云端以记录真实性能数据,如电动汽车电池随时间变化的健康状态、各种行驶条件下的 ADAS 传感器信息,甚至车辆功能使用情况,如图 2 所示。
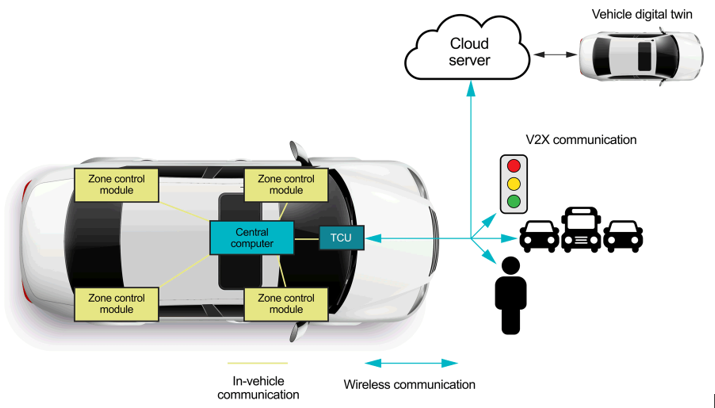
图 2:软件定义车辆连接到云和 V2X
软件定义车辆和区域架构方法的差异
了解根据具体设计要求在车辆中集中管理软件的不同方法。
每家汽车制造商都采用独特的方法来实现软件定义车辆。上一代车辆平台的遗留问题将迫使许多 OEM 逐步转向更适合其集中式软件方法的电气和电子区域架构。
如图 3 所示,虽然大多数 OEM 都在开发区域架构,但在决定控制车辆功能的软件的位置时,却有不同的方法。
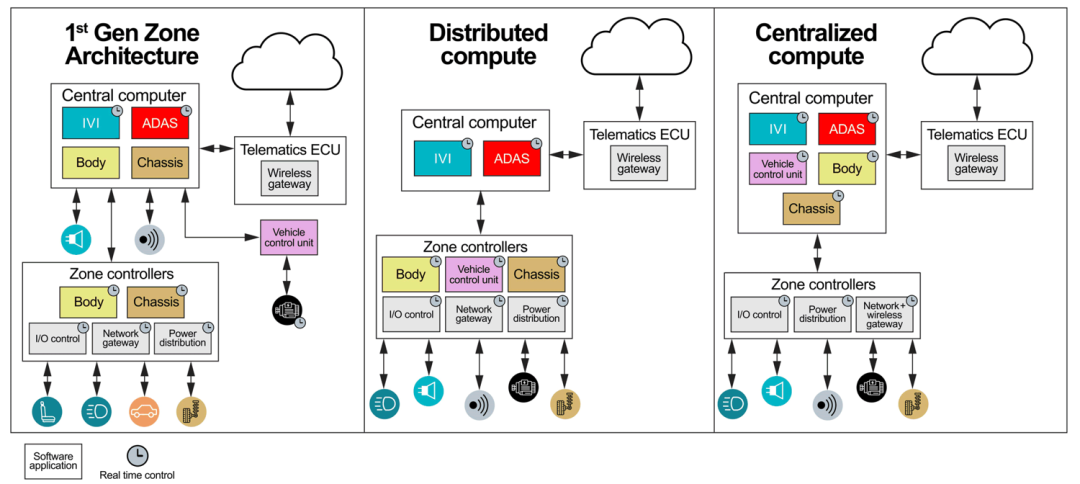
图 3:车辆架构类型比较
软件定义车辆正不断为汽车制造商带来新的机遇,帮助他们减少开发新车和新功能所需的时间和成本,在车辆整个生命周期内持续改善驾驶体验,并创造新的收入来源。尽管有多种方法可供选择,但集中管理车辆软件并将车辆硬件与软件分离将是重中之重。总体而言,OEM 可通过区域架构和软件定义车辆加快开发更智能、更安全、更节能的车辆。
-
软件定义汽车如何改变未来出行2025-05-20 1107
-
解锁未来汽车电子技术:软件定义车辆与区域架构深度解析2025-04-27 1761
-
电子技术在汽车领域的应用与发展2025-01-17 2145
-
软件定义车辆的技术概览2021-09-24 2492
-
汽车电子控制技术的发展历程及具体应用2021-08-30 4715
-
电子技术在现代汽车上的应用及发展趋势是什么2021-05-17 4129
-
汽车电子技术的未来如何发展?2021-05-14 4594
-
汽车汽油机电子控制技术未来如何发展?2021-05-13 1869
-
汽车电子行业是将电子信息技术应用到汽车所形成的新兴行业2019-06-26 3853
-
汽车电子加速成长,电子模块迎来发展新机2019-04-02 2670
-
电子技术的发展历程2019-03-25 2978
-
Spansion 就未来汽车电子技术发展应用方案发表演讲2018-06-25 5045
-
汽车的未来2013-08-26 4568
-
汽车电子技术2012-09-01 5364
全部0条评论

快来发表一下你的评论吧 !
