

 EtherNetIP转Profinet网关连接发那科机器人配置实例解析
EtherNetIP转Profinet网关连接发那科机器人配置实例解析
电子说
描述
本案例主要展示了如何通过Ethernet/IP转Profinet网关实现西门子1200PLC与发那科搬运机器人的连接。所需的设备有西门子1200PLC、开疆智能Ethernet/IP转Profinet网关以及Fanuc机器人。

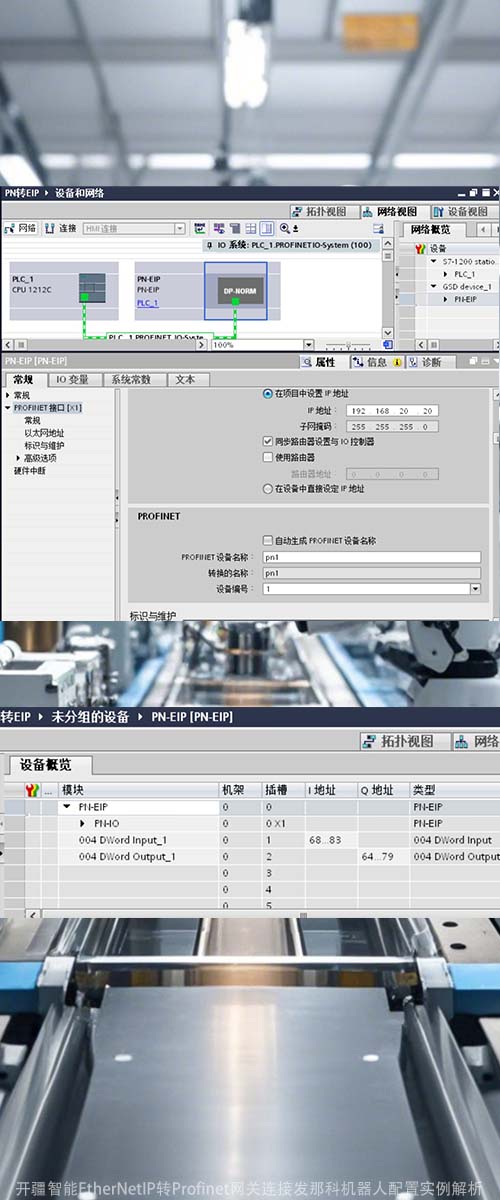
具体配置步骤:打开西门子博图配置软件,添加PLC。这是配置的第一步,为后续的操作奠定基础。导入Ethernet/IP转Profinet网关GSD文件。GSD文件包含了网关的设备描述信息,导入后才能在博图软件中识别和配置该网关。安装Ethernet/IP转Profinet网关GSD后选择对应模块。

确保选择正确的模块,以便与实际的硬件设备相对应。设置Ethernet/IP转Profinet网关IP及设备名称。本例中名称为PN1,设备IP为192.168.20.10。合理设置IP和名称有助于在网络中准确识别和管理设备。设置发送接收数据长度。可根据实际需求添加更大长度,以满足不同的数据传输要求。
下载组态到PLC,设置好机器人的IP地址,打开机器人设置菜单找到主机通讯选项。下载组态使PLC按照设置的参数运行,同时设置机器人的IP地址是实现通信的关键步骤之一。找到搬运机器人控制端的TCP/IP选项。这是配置机器人网络通信的重要环节。设置机器人的IP地址。
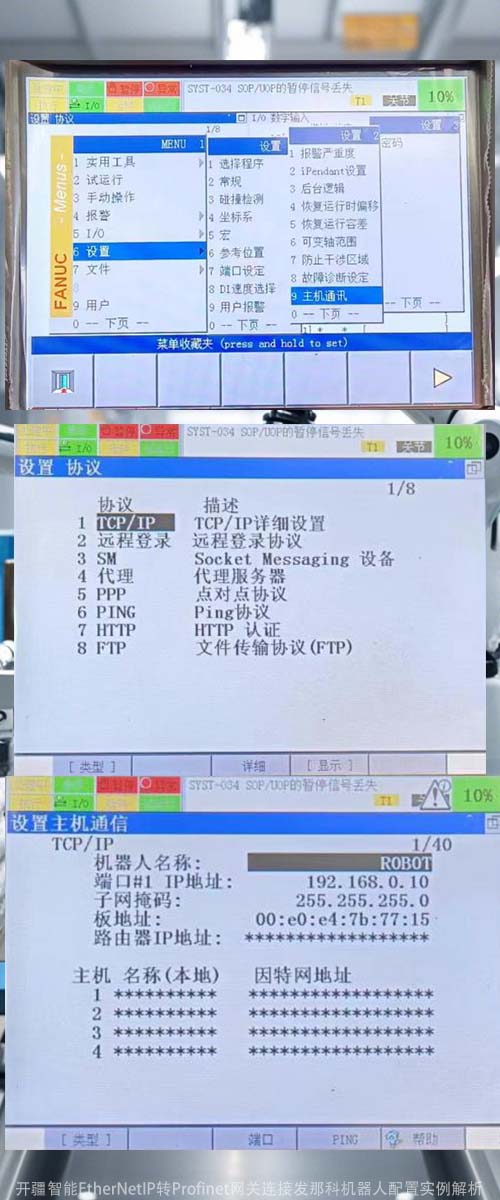
本例为192.168.0.10,确保与其他设备在同一网络范围内且不冲突。设置机器人连接的远程I/O的IP地址即Ethernet/IP转Profinet网关EtherNet/IP端的IP地址。建立机器人与网关之间的通信连接。添加一个链接,为数据传输创建通道。
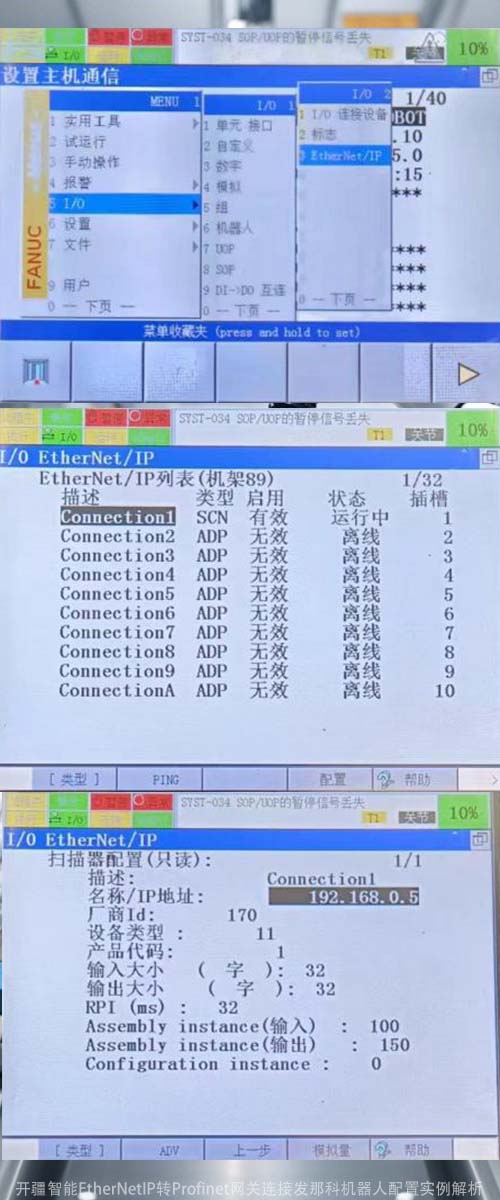
设置好从站IP、厂商ID、设备类型、产品代码和输入输出大小等参数。本例中从站IP为192.168.0.5,厂商ID为170,设备类型11,产品代码1,输入输出大小32个字(64字节),Assemblyinstance的输入输出为100/150。如果设备不能导入eds文件,参数可从网关的eds文件中查找。
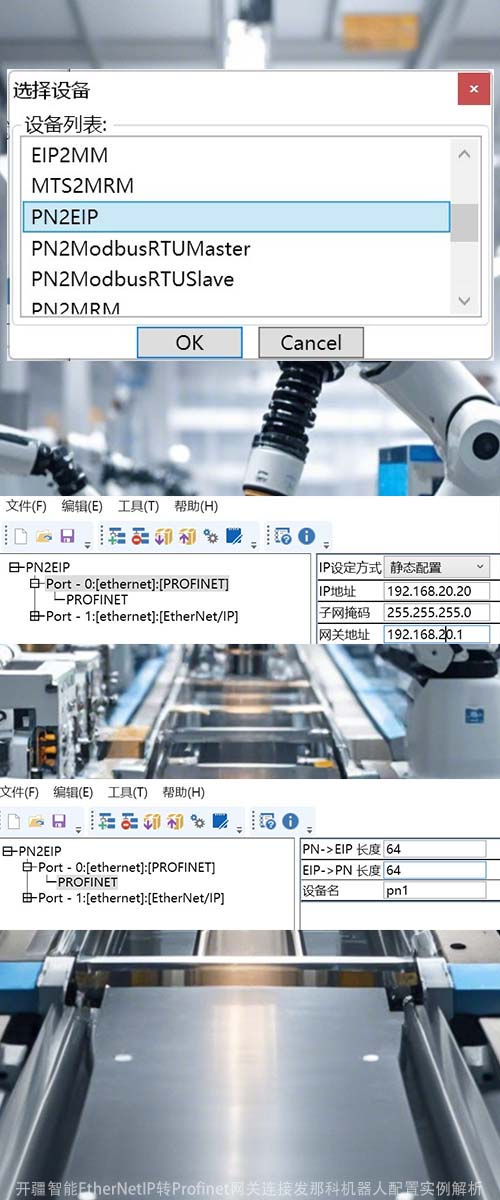
打开Ethernet/IP转Profinet网关配置软件,选择PN2EIP。因为网关作为EtherNet/IP从站,所以选择相应的配置选项。设置Ethernet/IP转Profinet网关Profinet端的IP地址及设备名称。和博图组态保持一致,确保整个系统的参数统一。
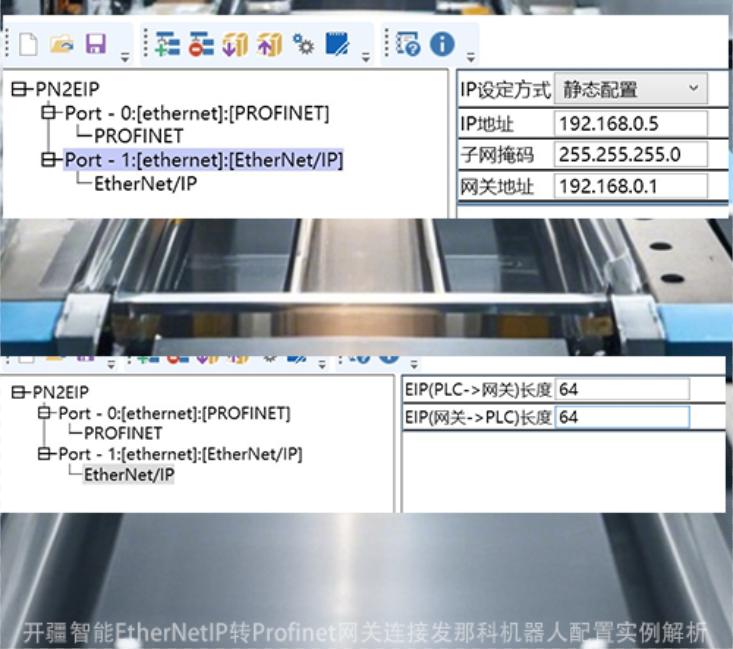
设置数据长度为64字节。由于机器人设置为32个字,换算后为64字节,保持一致以确保数据传输的准确性。设置EtherNet/IP端的IP地址以及数据长度。下载配置到Ethernet/IP转Profinet网关后重新上电即可使用。完成所有配置后,重新上电使网关按照新的配置运行,实现西门子1200PLC与发那科搬运机器人的连接和通信。
审核编辑 黄宇
-
Profinet转Ethernet IP网关连接库卡机器人问答式精简配置指南2026-03-24 944
-
开疆智能Profinet转Devicenet网关连接发那科机器人配置案例2025-07-07 1470
-
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例2025-06-28 1561
-
EtherNetIP转Profinet网关连接发那科机器人配置实例解析北京开疆智能技术有限公司 2025-03-12
-
从“零”到“联”:Profinet转Ethernet/IP网关搞定发那科机器手臂2025-03-07 1041
-
开疆智能Profient转DeviceNET主网关连接发那科机器人配置案例2025-01-14 1360
-
开疆智能Profinet转EthernetIP从网关连接ABB机器人做EtherNet主配置案例2024-12-17 1266
-
Profinet转EthernetIP网关连接HCS-6100系统配置2024-01-11 1703
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 3258
-
profinet转ethernet网关连接发那科机器人配置案例2023-08-03 3769
-
Profinet转Modbus TCP网关连接搬运机器人配置案例2023-06-07 2125
-
Modbus转profient网关连接Smart PLC实现Profinet转modbus协议转换2023-03-22 1045
全部0条评论

快来发表一下你的评论吧 !
