

摄像头及红外成像的基本工作原理
描述
本文介绍了摄像头及红外成像的基本工作原理,摄像头可以将看到的图像真实的呈现出来,所见即所得!
摄像头如何工作?
摄像头可以将看到的图像真实的呈现出来,所见即所得。
比如人眼看到的一座山的风景,是这样:

手机摄像头设计后的外观是这样:

红外摄像头设计后的外观是这样:

如何将外界的图像真实地呈现在芯片上?
对于芯片来说,外界图像可以按不同区域进行拆解,图像按区域拆解后是这样:
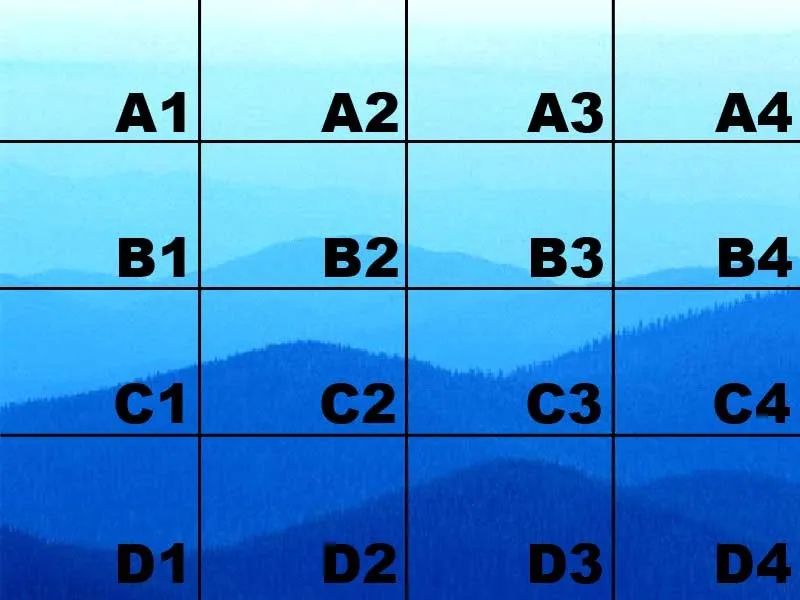
拆解后的图片对芯片来讲,是下面这样:
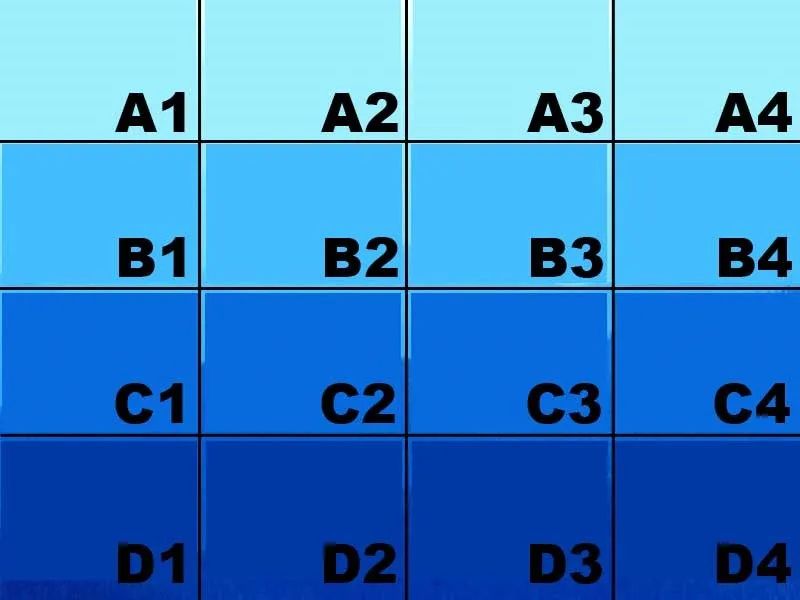
感光芯片的设计思想就是分割被描述的区域,用相应的灰度来填充。
如果将图像拆解的方格(像元)足够小,就足够显示每一个图片的细节。这就是为什么手机像素要向2000W,3000W甚至更高像素发展的原因。
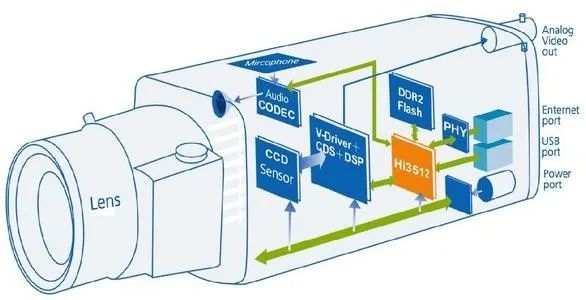
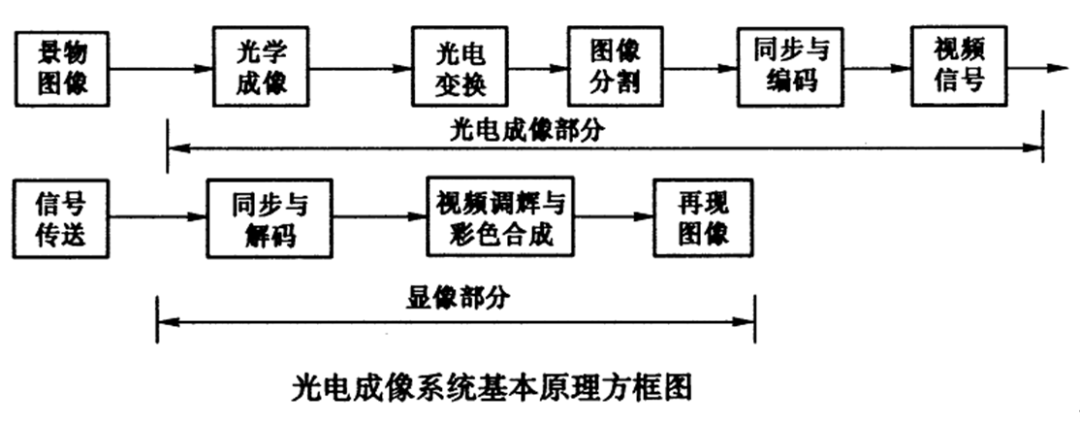
芯片虽然接收到了光信号,要将接收到的光信号转变成屏幕上的图像,背后有一些运算逻辑,大致过程是这样:
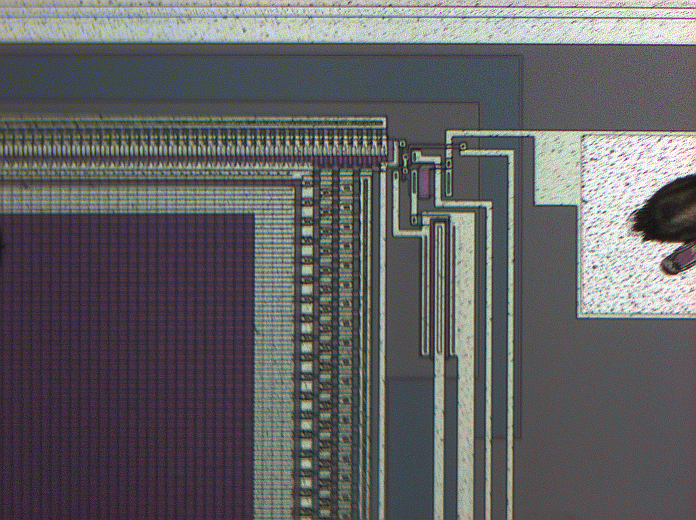
一张典型的光学芯片,在显微镜下观察到的局部是下面这样的,左下角暗红色区域是接收光信号的成像区域,周围黄色镀金区域是电路连线,线路将光信号输出到外部电路中。
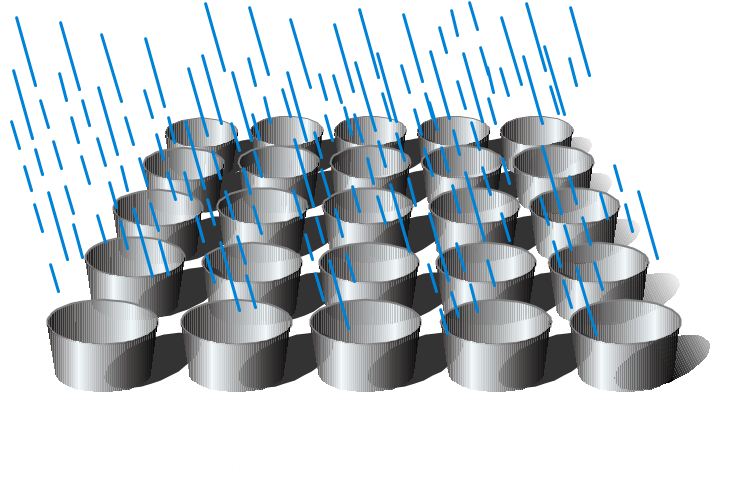
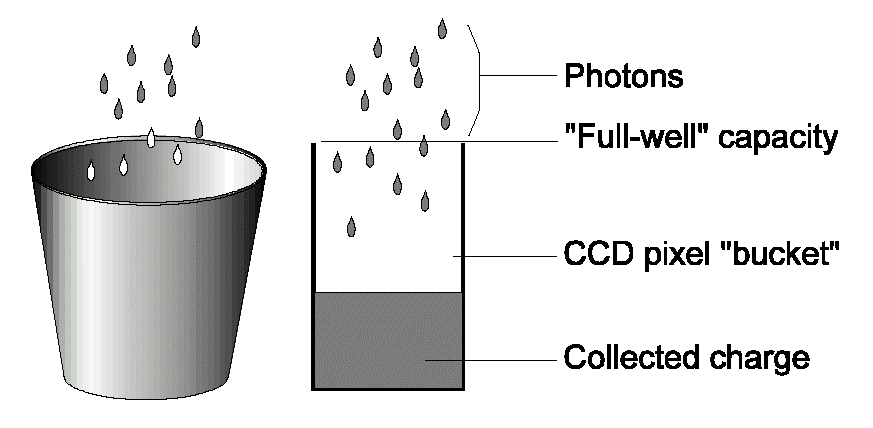
可以将芯片的成像区域比喻成一个个小桶,用来接收外部的光信号。
1.有一个光电转换装置把入射到每一个感光像素上的光子转化为相应数量的电荷。(小桶是像元,雨水是光信号。)
2.随着芯片接收外部的光电子,这些电荷可以被储存起来。
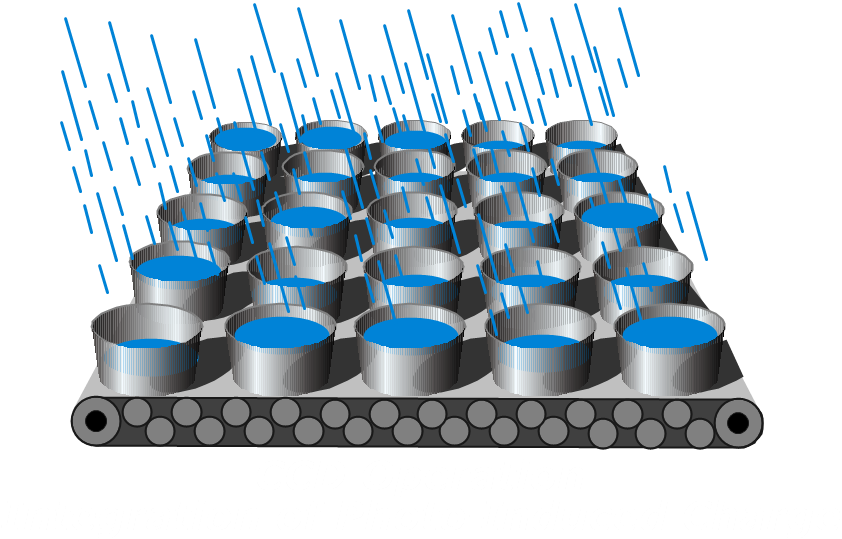
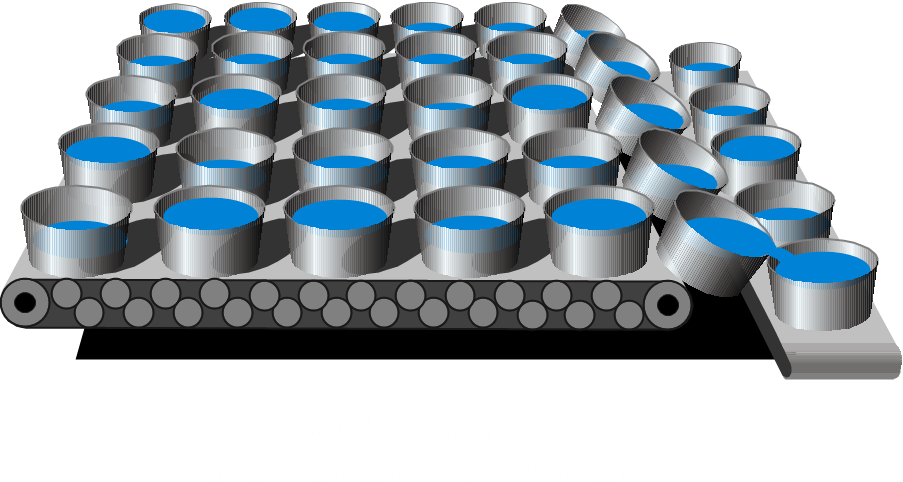
3.电荷可以被有秩序地转移出感光区域。
光电转化的原理
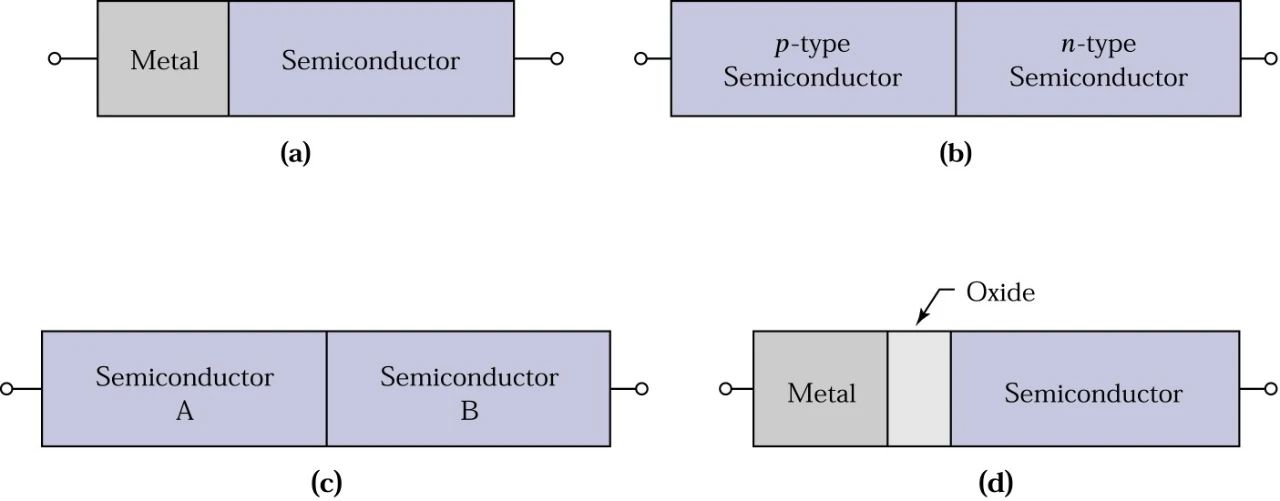
摄像头单元部分,是一个由金属-氧化物-半导体组成的电容器。
这一装置能够完成光电转换。在P型单晶硅的衬底上做一层绝缘氧化膜,通过活化置换技术再在氧化膜表面做出许多排列整齐的可透光的电极,当光线通过时,氧化膜与P型单晶硅之间产生电荷,其电荷的数量与光照强度及照射时间成正比。
若在电极上施加一个适当的正电压,会形成电荷耗尽区,即能够吸引电子的势阱。
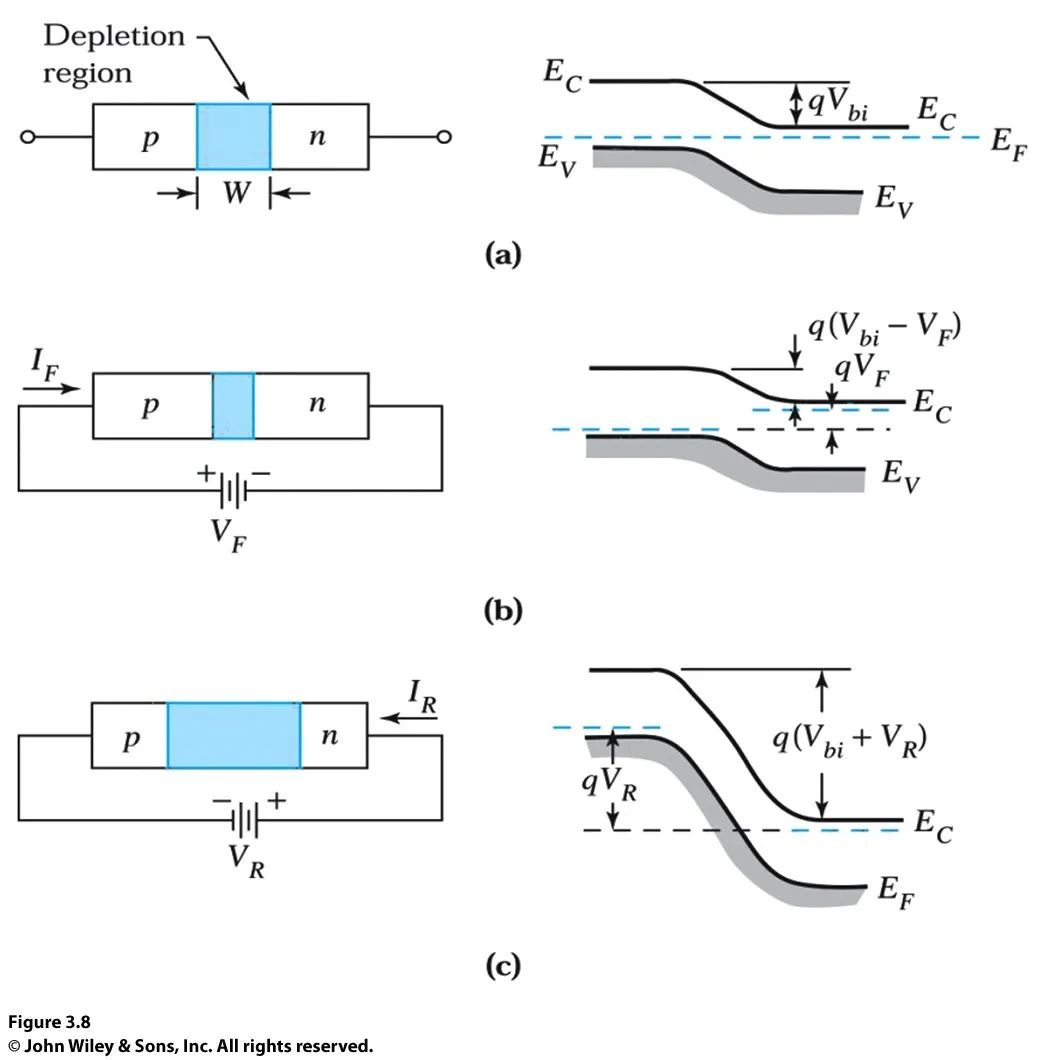
电极上所加的电压越高,势阱越深,电荷留在阱内量越多。只要电压存在,电子就能储存在势阱里。
当景物的光照射到摄像头时,具有光敏特性的P型硅在光量子的激发下产生电子-空穴对,空穴移向衬底而消失,电子进入势阱并存储在那里。
由于绝缘氧化物层使得电子不能穿过而到达电极,因此存贮在势阱里的电子形成了电荷包,其电荷量的多少与光照强度成正比,于是所有电极下的电荷包就组成了与景物相对应的电荷像。
这一过程存在着以下问题:
当一个像素聚集过多的电荷后,就会出现电荷溢出,溢出的电荷会跑到相邻的像素势阱里去。这样电荷的电量就不能如实反映原物。
要避免这种情况发生的方法:
(1)把桶做大些;
(2)减少测量时间;
(3)把装满水的桶倒出一些;
(4)做个导流管,让溢出的水流到地上去,不要流到其它桶里。
对应的方法:
(1)增大单位像素尺寸;
(2)缩短曝光时间;(缺点:对于暗的部分曝光不足。)
(3)间歇开关时钟电压;缺点:会降低速度
(4)溢出沟道和溢出门;(缺点:制作复杂,且还有缺陷)
所以,增大像素尺寸是最完善的做法。
电荷转移
当一个摄像头芯片感光完毕后。每个像素所转换的电荷包,就按照一行的方向转移出摄像头感光区域。为下一次感光释放空间。
在同一个像素区域,应该有电荷储存空间和用来转移的空间。这样才能顺利完成转移。
势阱的深浅由电极上所加电压的大小决定。电荷在势阱内可以流动,它总是从相邻浅阱里流进深阱中,这种电荷流动称为电荷转移。若有规律改变电极电压,则势阱的深度就会随之变化,势阱内电荷就可以按人为确定的方向转移,直到最终由输出端输出。
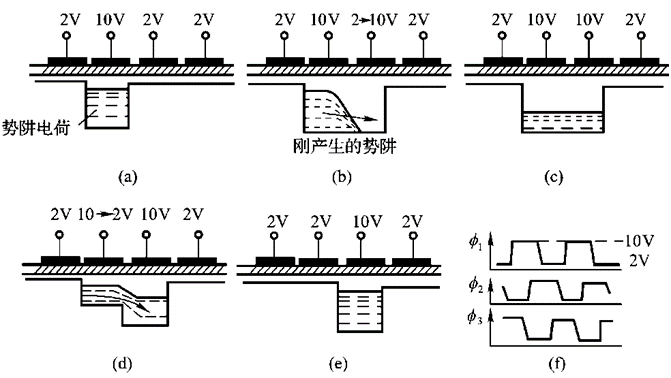
电荷转移分单相驱动、双相驱动、三相驱动及四相驱动等多种方式,除了电极构造及所加电压波形不同以外,其转移原理是一样的。
四相驱动方式的驱动电路比较复杂,但相邻势阱的深度差较大,电荷的存贮量也大,容易实现隔行扫描,在专业级摄像机中应用较为广泛。
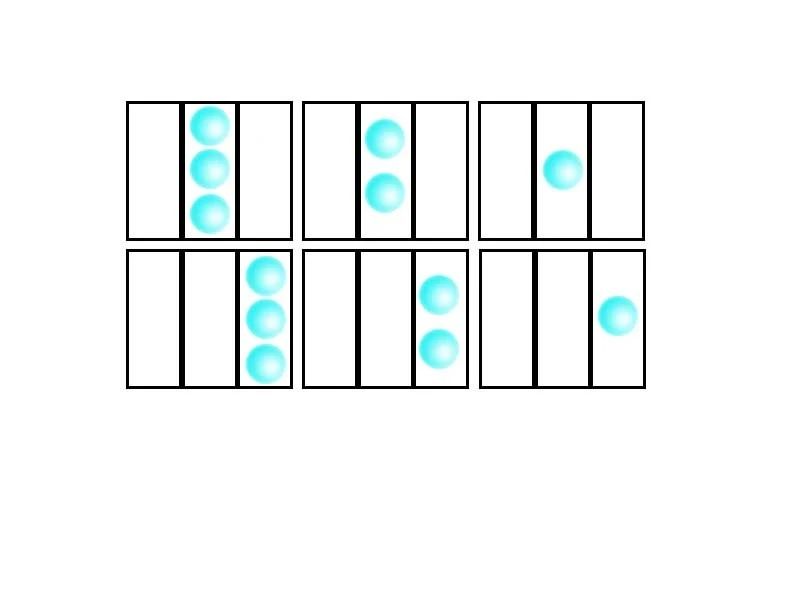
四相驱动方式即将绝缘层上的电极按列的方式每四个分为一组,形成一个象素单元,每组电极分别加上不同的偏置电压,则在电极下绝缘膜与P型硅之间就产生不同深度的势阱,如果有规律地改变电极上的电压值,使势阱产生变化,就可以使电子定向移动,这也就是摄像头的扫描读出原理。
摄像头光电信号转移方式
摄像头根据转移电极结构及转移方式的不同又可以分成:
(1)InterlineTransfer(行间转移)
(2)FullFrame(全帧)
(3)FrameTransfer(帧传递)
(4)Line (线阵)
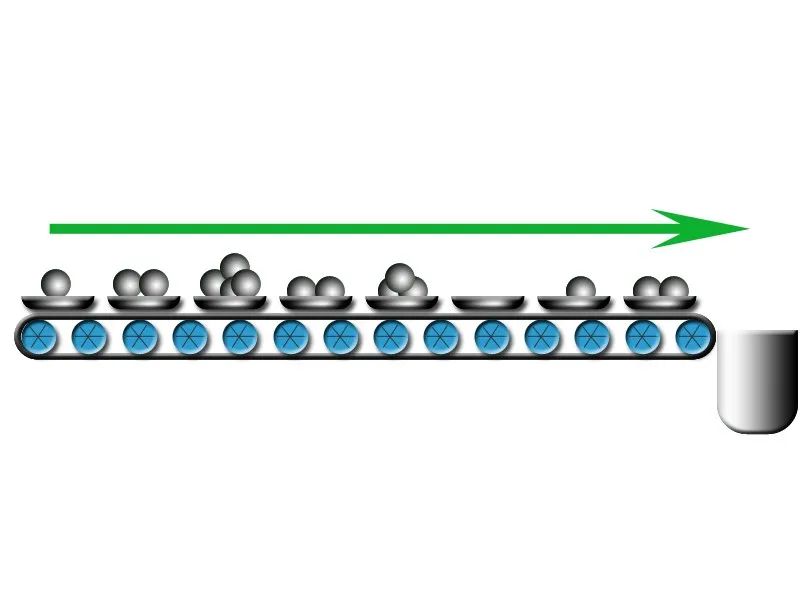
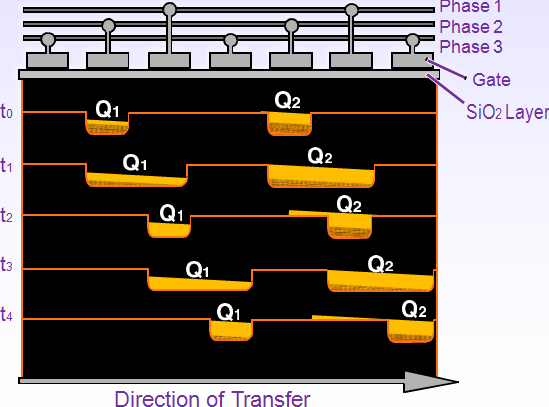
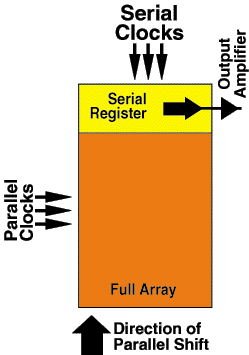
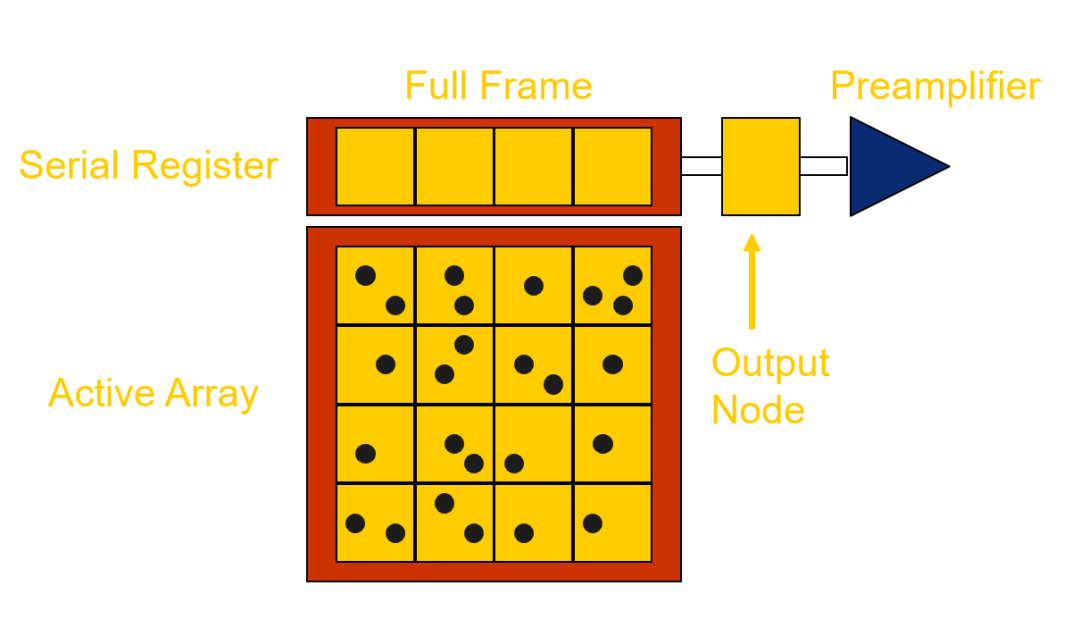
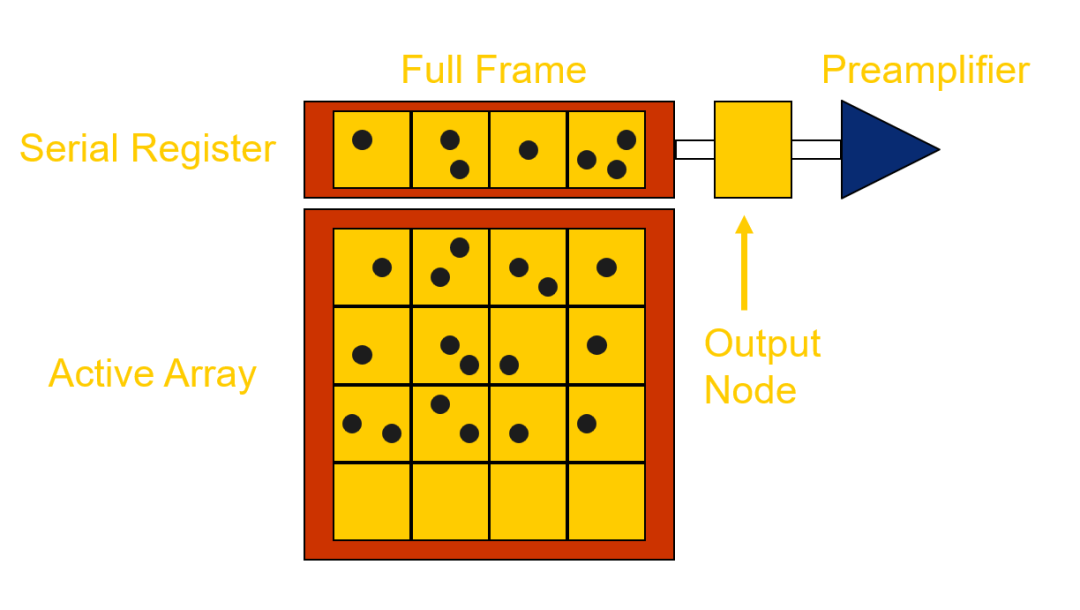
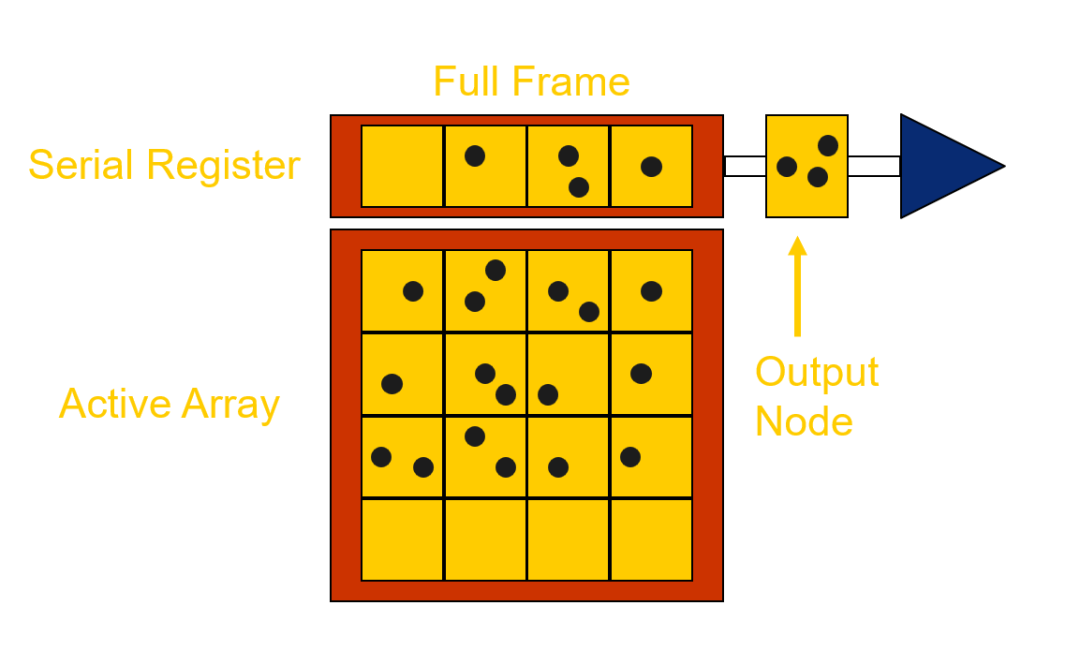
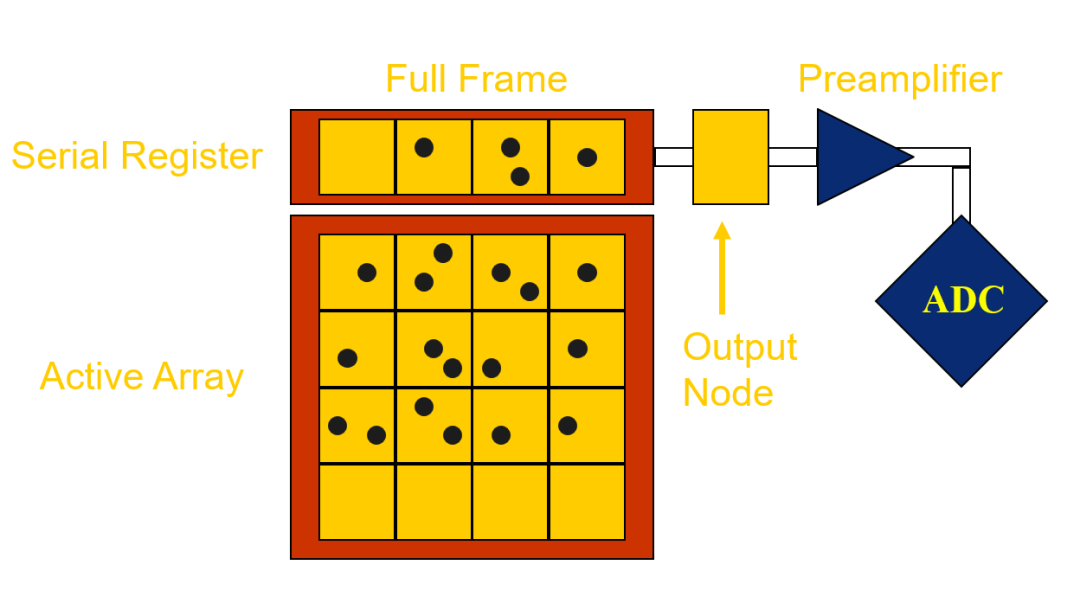
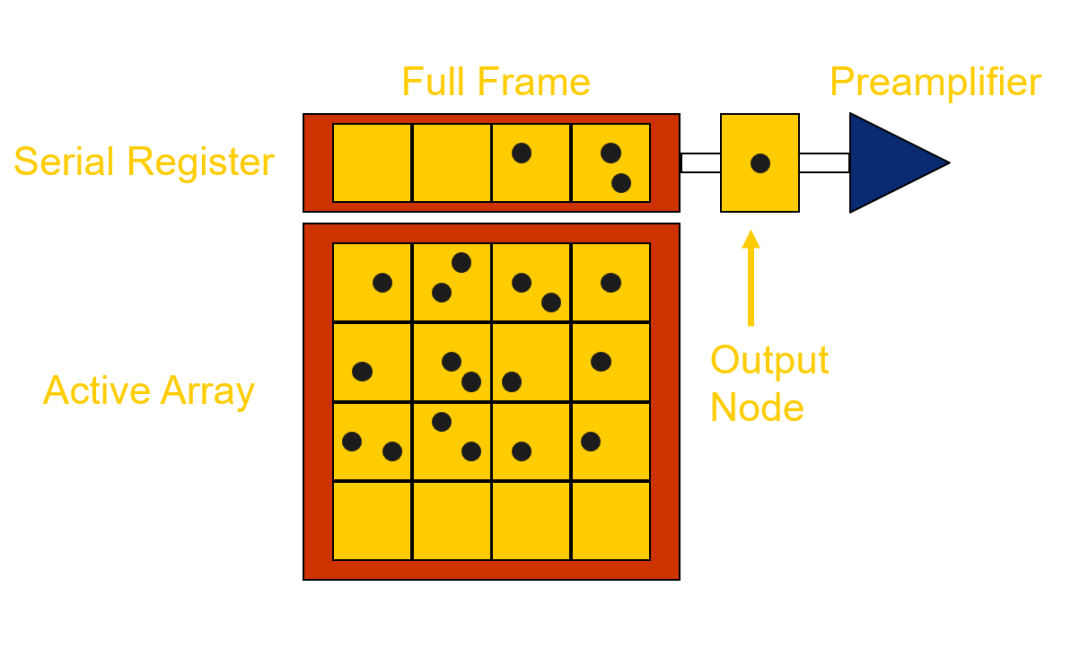
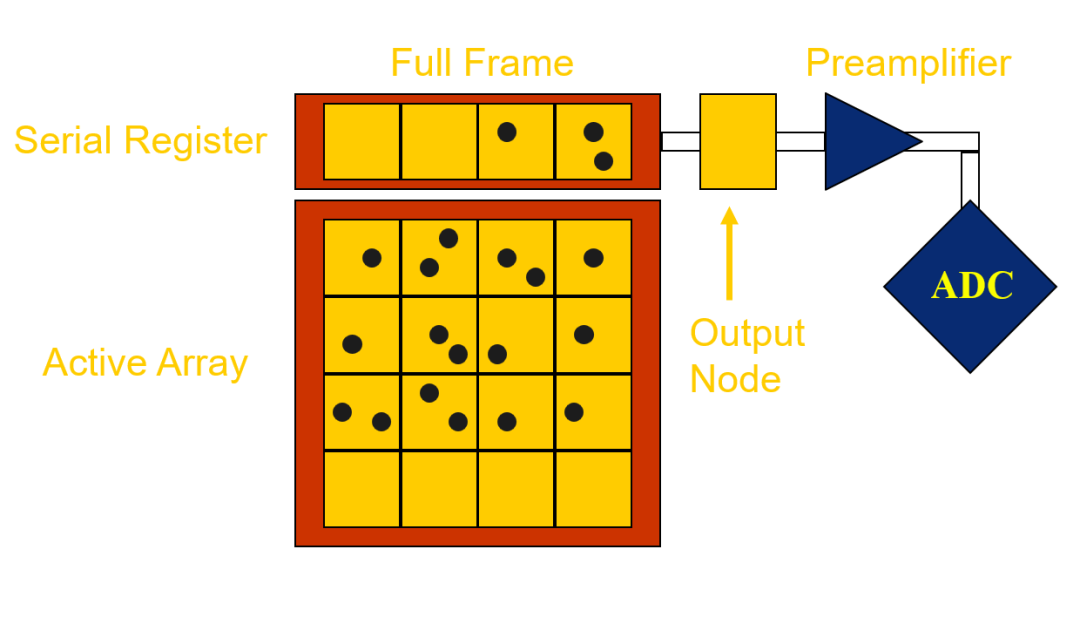
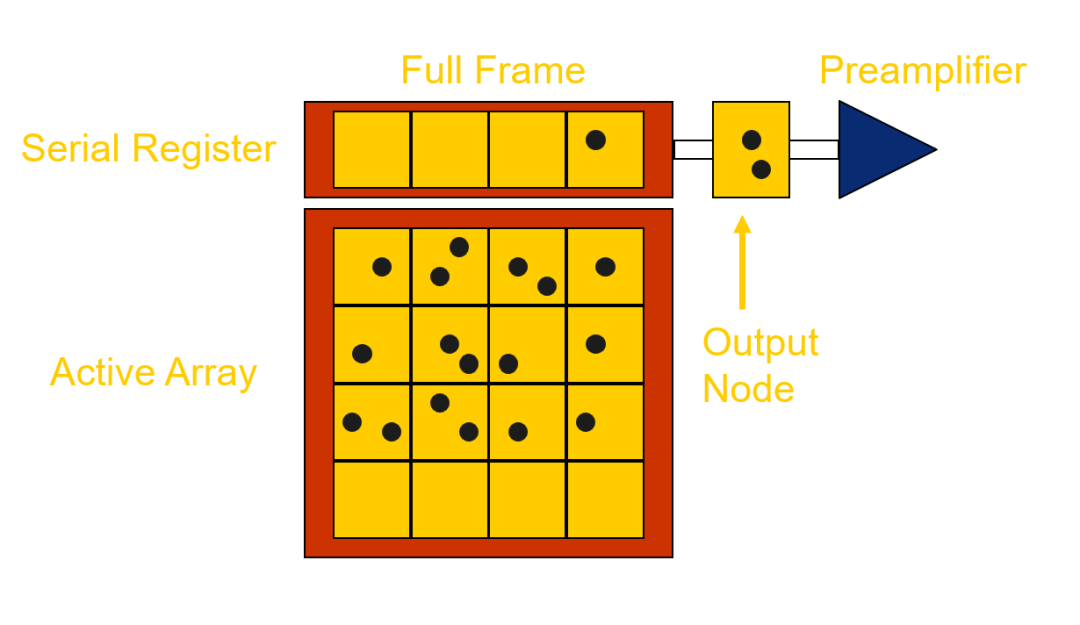
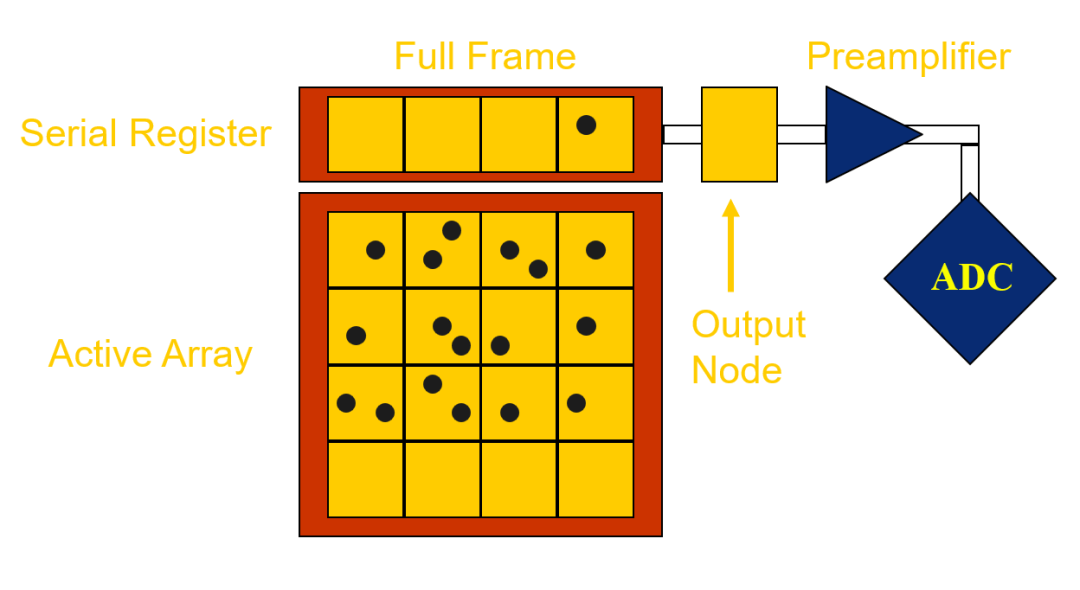
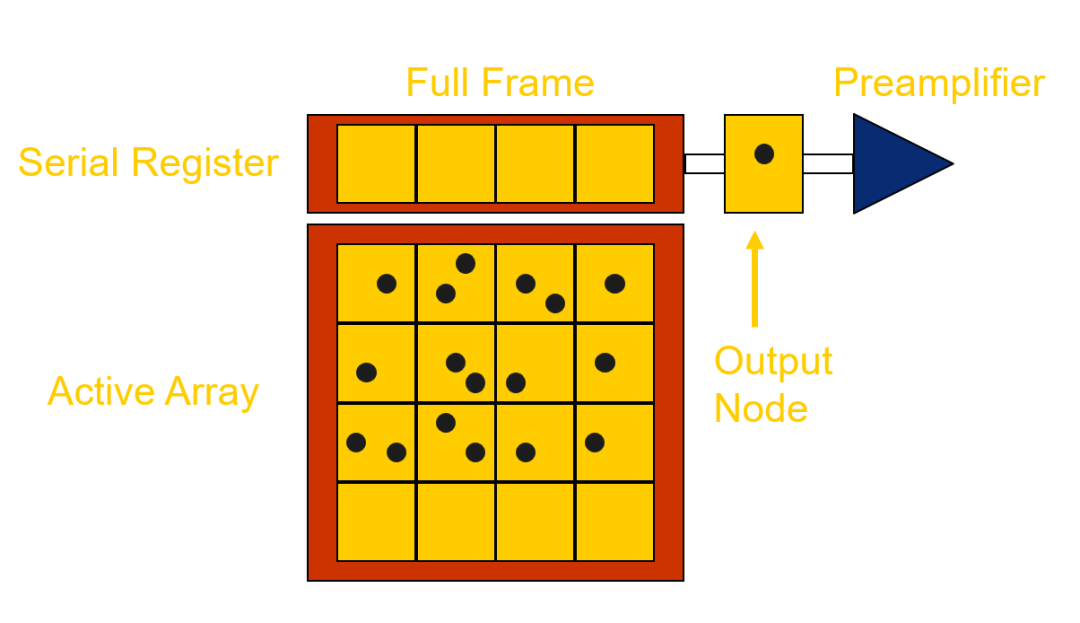
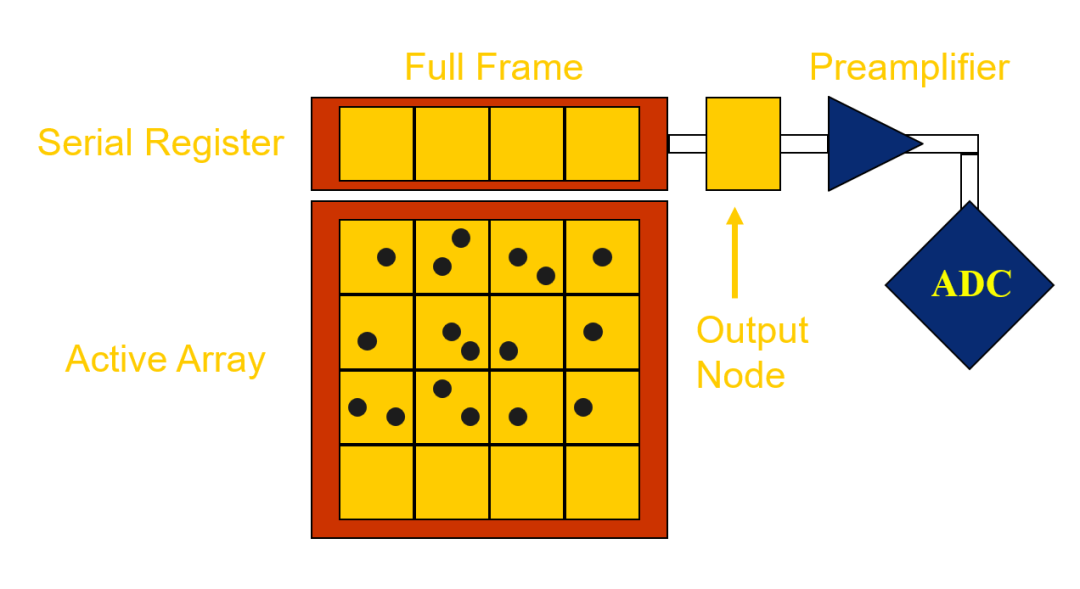
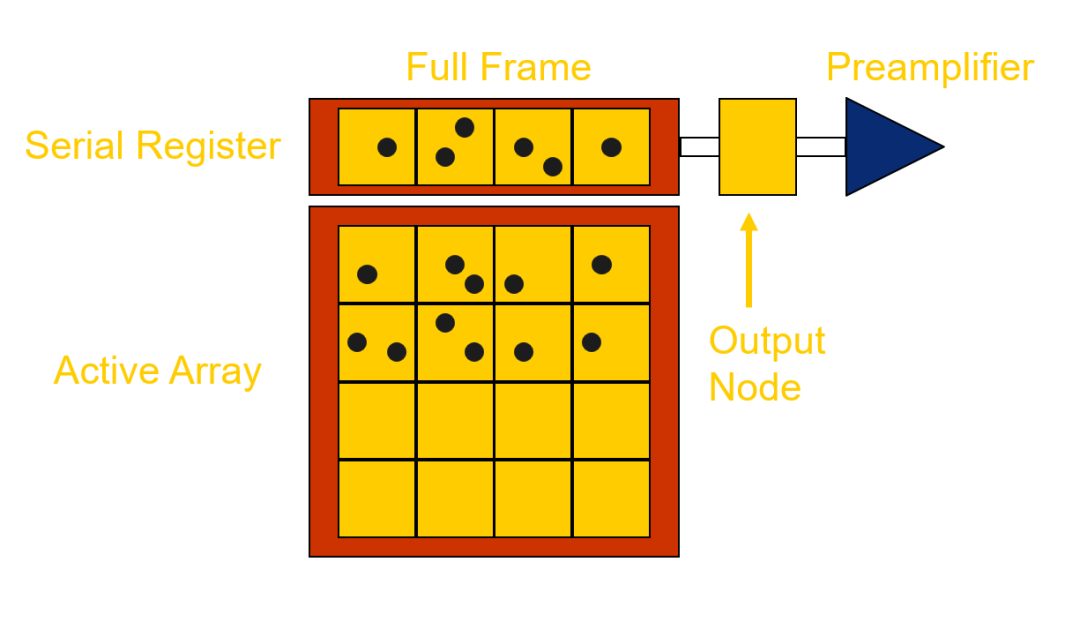
以最典型的FullFrame传输为例,阵列的每一个像素都感光。
传输时,每一列向单行串行寄存器上相对应的位置转移。同时,串行寄存器向阵列的出口转移。
这是一种架构更简单的感光设计,Full Frame可以利用整个感光区域(没有寄存区的设计),有效的增大感光面积,同时也适应长时间曝光。
感光和电荷输出过程是分开的。
下面是相机在拍照过程中光电子传输形式,其中下面大的黄框代表芯片敏感元区域,也就是芯片成像区域,上面黄色条纹代表接收光电子的电路部分,芯片在接收光电子后,按行输出光电子信号,黑色点代表光电子数量和传输方向。
摄像头的数据输出形式
上面所述都是按照单行单列的模式进行电荷传输的。在实际应用中如果单行的像素太多,会影响传输速度。这时可以使用多通道传输。
1. 单输出(Single Tap) 通常是在低分辨率或低速的Line-scan Camera上的设计,它的特性是感光后将光转成电荷信号通过单一输出将数据传递出去。
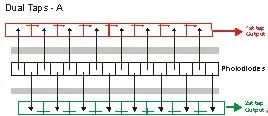
2. 奇偶双输出 (Dual Taps) 通常是在高分辨率或为了提高传输速度的设计,它的特性是感光后分成奇数及偶数将光转成电荷信号分成两组将数据传递出去。要是不小心设定成单输出,影像就会如同上图所示,影像会有垂直的空隙,影像在放大时便会发现pixel 跟 pixel 中间的黑色影像,其实数据都是空的。

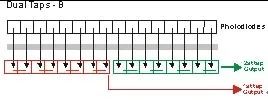
3. 前后双输出 (Dual Taps) 通常是在高分辨率或为了提高传输速度的设计,它的特性是在感光后分成前半段及后半段将光转成电荷信号分成两组将数据传递出去。要是不小心设定成单输出,影像就会如上图所示,影像只有一半,另一半变成黑色影像,其实数据都是空的。

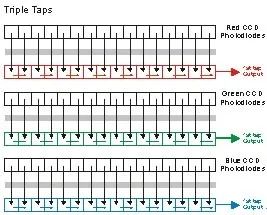
4. 三输出 (Triple Taps)
通常是用在RGB 彩色摄像头上,棱镜会依据光谱的波长特性(红光波长最长,再来是绿光,再来是蓝光)分别将光线投射至红、绿、蓝三组摄像头上,每个摄像头分别将光转成电荷信号输出,虽然三组摄像头分别有独立的 Data Clock,但是因为必须要R, G, B 的数据组合在一起才会变成彩色影像,所以实际速度并没有因为每个摄像头有独立的 Data Clock而加快。
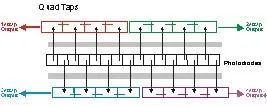
5. 四输出 (Quad Taps)
通常是在高分辨率或为了提高传输速度的设计,结合了双输出的奇偶输出加上前后段输出的特性分成四组,让取像速度加快变成四倍。
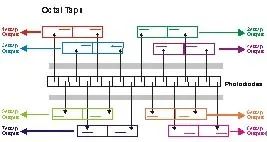
6. 八输出 (Octal Taps) 目前这类设计出现在超高分辨率的机种上,除了分出前后段,而且各分出四组输出,因此取像速度可以提高成八倍而不会因为分辨率很高而使速度大大降低。
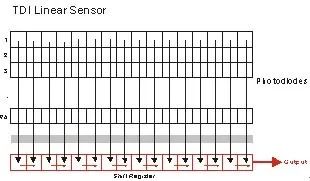
7. TDI( Timing Delay Integration ) 时间延迟积分
它的摄像头结构比较特殊,并非是单排感光而是96排一起感光,即同样的一次曝光时间下它会累积96排的感光量转换成电荷信号之后再传输出去,由于累积的亮度较一般的摄像头高,故较适合应用在光线较暗无法提供充足亮度的系统上。但是这种型式十分注重取像频率及运动速度的一致性,要是运动速度不稳定取像出来会有模糊的情形。
-
红外摄像头模组是什么?科技时代的眼睛2025-07-31 1686
-
摄像头凸透镜成像原理 摄像的原理是小孔成像吗2024-02-01 4579
-
摄像头工作原理2023-10-20 917
-
Camera摄像头工作原理是什么?2021-09-27 1664
-
红外线摄像头工作原理_红外线摄像头怎么调2021-01-12 22802
-
ISP和摄像头工作原理2019-09-17 11717
-
关于摄像头模组工作原理分析和应用2019-08-26 24832
-
USB 摄像头2016-12-01 5663
-
红外线摄像头报价2011-12-15 6810
-
手机camera摄像头工作原理2011-11-30 242761
-
数码摄像头成像距离2009-12-22 1467
-
摄像头的工作原理 Product information2009-12-18 27274
-
什么是CCD,ccd摄像头工作原理2009-08-02 7288
全部0条评论

快来发表一下你的评论吧 !
