

使用英特尔哪吒开发套件部署YOLOv5完成透明物体目标检测
描述
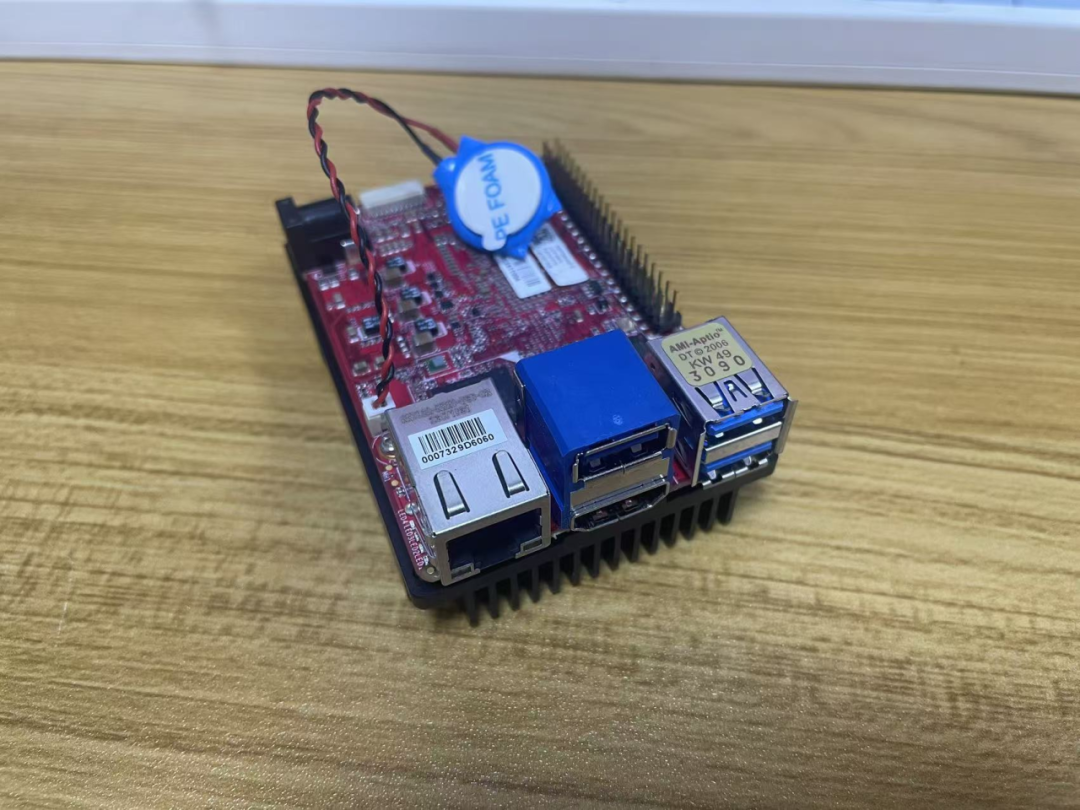
1哪吒套件简介
英特尔的哪吒(Nezha)开发套件是一款专为边缘AI和物联网应用设计的高性能计算平台,搭载了英特尔 N97处理器、内置英特尔 UHD Graphics GPU,并提供高达8GB LPDDR5内存与32GB至64GB eMMC存储选项。它支持Windows和Linux操作系统,具备丰富的接口如千兆以太网、HDMI 1.4、USB 3.0/2.0以及GPIO等,兼容树莓派扩展板。此外,该套件采用无风扇设计并集成了TPM 2.0安全模块,适用于自动化、物联网网关、数字标牌及机器人等多种场景,结合OpenVINO 工具包可加速深度学习模型推理,便于开发者快速构建高效且安全的解决方案。
2YOLOv5简介
YOLOv5是YOLO(You Only Look Once)系列中的一种实时对象检测系统,它以速度快、准确性高而闻名。对于开发者来说,YOLOv5提供了一种简单易用的方法来创建高效的对象检测模型。官方GitHub仓库提供了丰富的资源和示例代码,可以帮助用户快速入门并开始构建自己的检测器。
3哪吒套件部署YOLOv5
YOLOv5以其出色的实时性能和高准确性而受到广泛欢迎,并且官方提供了详尽的文档和支持,与其他设备相同,在哪吒套件上部署YOLOv5进行透明物体目标检测时,用户仍需注意一些关键步骤。首先,确保开发环境已正确配置,包括安装所有必要的依赖项如Python、PyTorch等。接着,准备训练数据集是至关重要的一步,这通常涉及将图像及其标注信息按照特定格式整理好。对于透明物体检测这样的特定任务,可能还需要对模型做一些微调以优化其识别能力。整个过程虽然需要一定的技术背景支持,但借助于丰富的在线资源和社区帮助,即使是初次尝试者也能顺利完成部署。下面的步骤可以让你在搭载在哪吒套件的windows平台快速上手训练自己的模型。
4搭配环境与安装依赖
在win+R中打开cmd,输入以下代码创建并进入一个名为yolov5s, python3.8版本的虚拟环境。
conda create -n yolov5s python=3.8 conda activate yolov5s
克隆仓库:从官方GitHub仓库克隆YOLOv5项目到本地机器。
git clone https://github.com/ultralytics/yolov5 cd yolov5
然后输入以下代码,即可自动下载安装所有需要的库。
pip install -r requirements.txt
如果下载速度过慢,可能会导致报错,可以复制下面代码(清华源)到cmd中运行,然后在重新进行上面下载库的步骤。
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/ conda config --ad conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge/ conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/msys2/ conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/bioconda/ conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/menpo/ conda config --set show_channel_urls yes
5Trans10k数据集准备
5.1 数据集下载
Trans10K是一个公开的大规模透明物体分割数据集,包含10,428张真实场景图像,每张都经过手动标注。它提供了多样化的透明物体样本,如杯子、瓶子和窗户等。数据集分为训练(5,000张)、验证(1,000张)和测试(4,428张)三部分,并进一步细分为简单和困难类别,整个数据集大小约为10.6GB。
可以使用相应的SDK进行下载:
pip install openxlab #安装 pip install -U openxlab #版本升级 import openxlab openxlab.login(ak=, sk= ) #进行登录,输入对应的AK/SK from openxlab.dataset import info info(dataset_repo='OpenDataLab/Trans10K') #数据集信息及文件列表查看 from openxlab.dataset import get get(dataset_repo='OpenDataLab/Trans10K', target_path='/path/to/local/folder/') # 数据集下载 from openxlab.dataset import download download(dataset_repo='OpenDataLab/Trans10K',source_path='/README.md', target_path='/path/to/local/folder') #数据集文件下载
下载后解压即可。
5.2 格式化数据
Trans10K数据集通常包含图像及其对应的标注文件。为了与YOLOv5兼容,您需要确保每个图像都有一个对应的.txt文件,其中包含目标框的位置信息。格式如下:
class_index x_center y_center width height
所有坐标都是相对于图像尺寸的归一化值(0.0到1.0之间)。然而Trans10K的标注格式不是YOLO格式。
这就需要编写一个脚本来将标注转换为YOLO格式。转换脚本如下:
import cv2
import numpy as np
import os
from pathlib import Path
path_to_masks = 'path/to/mask'
path_to_save_yolo_labels = ' path/to/mask/label'
def convert_mask_to_bbox(mask_path, save_path):
# 创建保存路径
Path(save_path).mkdir(parents=True, exist_ok=True)
# 遍历 mask 文件
for mask_file in os.listdir(mask_path):
if mask_file.endswith(".png"): # mask 以 .png 格式保存
mask = cv2.imread(os.path.join(mask_path, mask_file), cv2.IMREAD_GRAYSCALE)
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 获取文件名,无扩展名
filename = os.path.splitext(mask_file)[0]
bbox_file = open(os.path.join(save_path, filename + ".txt"), 'w')
for contour in contours:
x, y, w, h = cv2.boundingRect(contour)
# YOLO 格式:class x_center y_center width height (归一化到[0,1]范围)
img_height, img_width = mask.shape
x_center = (x + w / 2) / img_width
y_center = (y + h / 2) / img_height
width = w / img_width
height = h / img_height
# 假设所有目标都是同一类 (class = 0)
bbox_file.write(f"0 {x_center} {y_center} {width} {height}
")
bbox_file.close()
# 使用示例
convert_mask_to_bbox(path_to_masks, path_to_save_yolo_labels)
5.3 组织文件结构
按照YOLOv5的要求组织文件结构。需要以下目录结构:
/path/to/dataset/
├── images/
│ ├── train/
│ └── val/
└── labels/
├── train/
└── val/
images/ 目录下存放图像文件。
labels/ 目录下存放相应的标注文件(.txt)。
5.4 配置data.yaml文件
编辑YOLOv5项目中的data.yaml文件或者新建一个trans10k_data.yaml,指定数据集路径及类别信息,如下所示:
train: /path/to/dataset/images/train # 训练图片路径 val: /path/to/dataset/images/val # 验证图片路径 nc: 1 # 类别数量,假设只有一个类别 names: ['transparent_object'] # 类别名称列表
6启动训练
使用以下命令启动训练过程,您可以根据硬件性能调整图片大小(--img)、批量大小(--batch)等选项。
python train.py --img 640 --batch 16 --epochs 50 --data data/trans10k_data.yaml --cfg models/yolov5s.yaml --weights yolov5s.pt
训练完成后,就得到了一个能够检测透明目标的模型。
7总结
通过遵循上述步骤,即使是初学者也能迅速掌握YOLOv5的训练方法并在英特尔的哪吒(Nezha)开发套件上成功运行。哪吒套件凭借其高性能的英特尔 N97处理器、内置的英特尔 UHD Graphics GPU以及高达8GB的LPDDR5内存,为实时目标检测提供了强大的计算支持。
借助YOLOv5的强大功能以及个性化的Trans10K数据集,用户能够快速开发出针对透明物体的高度精确的对象检测模型。哪吒套件的无风扇设计和丰富的接口选项比如千兆以太网、HDMI 1.4、USB 3.0/2.0等,使其非常适合部署在各种边缘计算环境中,无论是智能监控、工业自动化还是其他物联网应用,都能提供可靠且高效的解决方案。
-
基于瑞芯微RK3576的 yolov5训练部署教程2025-09-11 3195
-
使用英特尔开发板部署YOLOv5完成透明物体目标检测2024-12-13 1316
-
在树莓派上部署YOLOv5进行动物目标检测的完整流程2024-11-11 5349
-
英特尔开发套件『哪吒』在Java环境实现ADAS道路识别演示 | 开发者实战2024-04-29 1689
-
【转载】英特尔开发套件“哪吒”快速部署YoloV8 on Java | 开发者实战2024-03-23 1728
-
【YOLOv5】LabVIEW+TensorRT的yolov5部署实战(含源码)2023-08-21 2294
-
使用旭日X3派的BPU部署Yolov52023-04-26 1957
-
【YOLOv5】LabVIEW+YOLOv5快速实现实时物体识别(Object Detection)含源码2023-03-13 3448
-
【教程】yolov5训练部署全链路教程2023-01-29 5356
-
yolov5训练部署全链路教程2023-01-05 4697
-
在英特尔独立显卡上部署YOLOv5 v7.0版实时实例分割模型2022-12-20 6016
-
使用英特尔物联网商业开发套件改变世界2020-05-31 2901
-
英特尔的945GME高速芯片组开发套件2017-10-30 874
-
英特尔BOOT Loader开发套件-高级嵌入式开发基础2011-12-07 992
全部0条评论

快来发表一下你的评论吧 !
