

 CW32模块使用 VL53L0X激光测距传感器
CW32模块使用 VL53L0X激光测距传感器
描述
VL53L0X是 ST 公司推出的新一代 ToF 激光测距传感器,采用了第二代 FlightSenseTM技术,利用飞行时间(ToF)原理,通过光子的飞行来回时间与光速的计算,实现测距应用。较比上一代 VL6180X,新的器件将飞行时间测距长度扩展至 2 米,测量速度更快,能效更高。除此之外,为使集成度过程更加快捷方便, ST 公司为此也提供了 VL53L0X 软件 API(应用编程接口)以及完整的技术文档,通过主 IIC 接口,向应用端输出测距的数据,大大降低了开发难度。
1、模块来源
模块实物展示:
资料下载链接:
https://pan.baidu.com/s/15Ld90aG1VC0y_xp120UbZg
提取码:qydr
2、规格参数
工作电压:2.6 ~ 3.5 V
温度范围:2m
通信协议:I2C
I2C地址:0X52
管脚数量:6 Pin(2.54mm间距排针)
3、移植过程
我们的目标是在立创·CW32F030C8T6开发板上能够实现测量距离的功能。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
VL53L0X飞行时间测距传感器是新一代激光测距模块,VL53LOX是完全集成的传感器,配有嵌入式红外、人眼安全激光,先进的滤波器和超高速光子探测阵列,测量距离更长,速度和精度更高。
VL53L0X的感测能力可以支持各种功能,包括各种创新用户界面的手势感测或接近检测,扫地机器人、服务性机器人的障碍物探测与防撞系统,家电感应面板、笔记本电脑的用户存在检测或电源开关监控器,以及无人机和物联网(IoT)产品等。
3.2引脚选择
该模块有3个引脚,具体引脚连接见各引脚连接。
| 引脚 | 说明 |
|---|---|
| GPIO1 | 中断输出引脚 |
| XSHUT | 关机引脚,低电平关机 |
| SCL | I2C的时钟线 |
| SDA | I2C的数据线 |
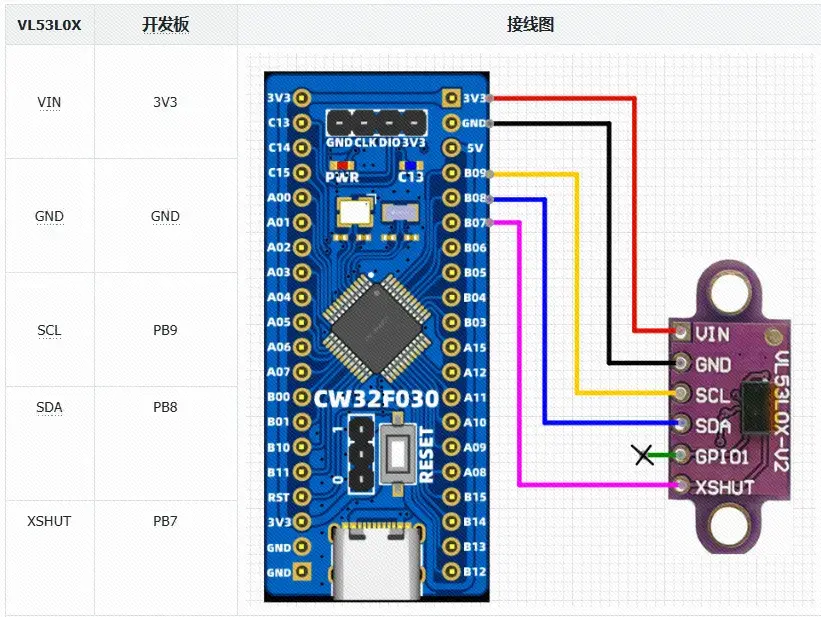
案例接线示意图
3.3移植至工程
模块工程参考入门手册工程模板
在bsp文件夹下导入VL53L0X文件夹
下载链接
链接:https://pan.baidu.com/s/1Gv5mKGa5LXk2IKJ8qkwTYA?pwd=LCKF 提取码:LCKF

然后我们将C文件和h文件路径添加到工程中。
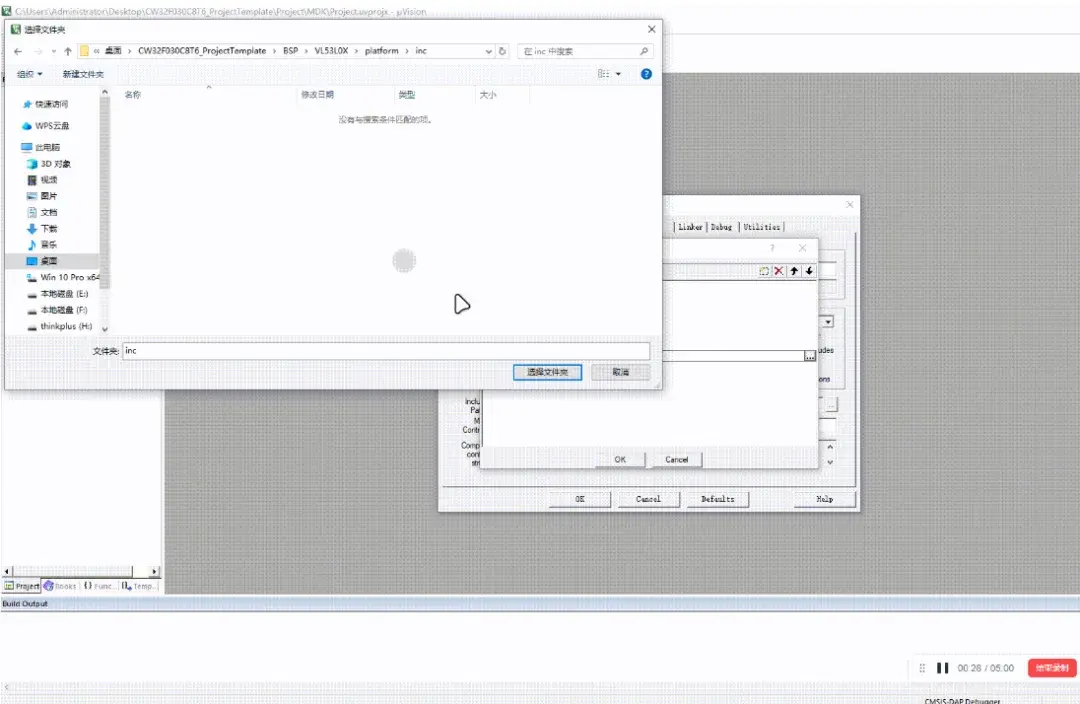
动图过大无法导入,请移步网页查看
https://wiki.lckfb.com/zh-hans/dwx-cw32f030c8t6/module/sensor/vl53l0x-laser-ranging-sensor.html
4、移植验证
在自己工程中的main主函数中,编写如下。
/*
* Change Logs:
* Date Author Notes
* 2024-06-20 LCKFB-LP first version
*/
#include "board.h"
#include "stdio.h"
#include "bsp_uart.h"
#include "bsp_VL53L0X.h"
extern VL53L0X_Dev_t vl53l0x_dev;//设备I2C数据参数
int32_t main(void)
{
board_init(); // 开发板初始化
uart1_init(115200); // 串口1波特率115200
uint8_t mode = 0;//0:默认;1:高精度;2:长距离;3:高速
VL53L0X_Error Status=VL53L0X_ERROR_NONE;//工作状态
printf("Startrn");
while(vl53l0x_init(&vl53l0x_dev))//vl53l0x初始化
{
printf("VL53L0X Error!!!nr");
delay_ms(500);
}
printf("VL53L0X OKrn");
while(vl53l0x_set_mode(&vl53l0x_dev,mode))//配置测量模式
{
printf("Mode Set Errorrn");
delay_ms(500);
}
while(1)
{
if(Status==VL53L0X_ERROR_NONE)
{
//执行单次测距并获取测距测量数据
Status = VL53L0X_PerformSingleRangingMeasurement(&vl53l0x_dev, &vl53l0x_data);
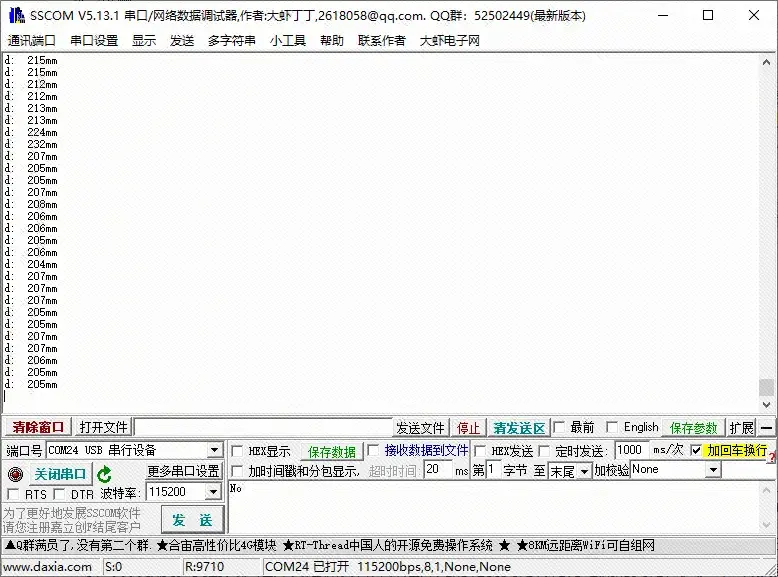
printf("d: %4immrn",vl53l0x_data.RangeMilliMeter);//打印测量距离
}
else
{
printf("errorrn");
}
delay_ms(500);
}
}
移植现象:在距离20cm处摆放障碍物,输出前方障碍物的距离。
测量时不要将模块靠近地面会影响模块,障碍物不光滑会造成一定的误差。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1RC72B43RkyvGPMopcjm4gQ?pwd=LCKF
提取码:LCKF
审核编辑 黄宇
-
小安派BW21-CBV-Kit入门教程之读取VL53L0X红外测距传感器数据2025-07-24 917
-
基于STM32CUBEMX驱动TOF模块VL53l0x(2)----修改设备地址2023-12-01 3124
-
使用VL53L0X激光传感器的Arduino高度测量2022-11-01 1583
-
RT-Thread VL53L0X TOF传感器驱动设计资料实现2022-09-15 2525
-
VL53L0X激光测距传感器的数据手册免费下载2020-12-08 2076
-
使用STM32F103应用VL53L0X激光测距模块的测试参考程序免费下载2020-06-12 2593
-
微雪电子测距传感器VL53L0X测距模块简介2020-01-06 11243
-
dfrobotVL53L0X ToF激光测距传感器简介2020-01-02 8603
-
Adafruit VL53L0X飞行时间距离传感器的使用2019-11-28 14840
-
VL53L0X TOF激光测距传感器的数据手册免费下载2019-07-08 2238
-
Vl53L0X测距传感器如何通过GPIO中断2019-03-22 6237
-
ATK-VL53L0X激光测距传感器模块使用说明免费下载2019-03-18 3962
-
VL53L0X飞行时间测距传感器开发板套件2018-02-12 3959
-
新一代ToF 激光测距模块VL53L0X2017-04-06 15022
全部0条评论

快来发表一下你的评论吧 !
