

飞思卡尔S12ZVM混合集成芯片在车用BLDC中的应用
MEMS/传感技术
描述
0 引 言
BLDC电机与传统有刷电机相比,具有更高的能效、更长的使用寿命、更紧凑的外形、更低的噪音和更高的可靠性,这些优点使得BLDC愈来愈多地出现在汽车应用中,用来取代传送带和液压系统,提供额外功能和提高燃油经济性,同时消除维护成本。由于电励磁必须与转子位置同步,因此BLDC 电机在运行时,通常需要一个或多个转子位置传感器。由于成本、可靠性、机械包装的原因,特别是当转子在液体中运行时,电机适宜在无位置传感器的条件下运行,即通常所说的无传感器运行。
对于汽车用BLDC控制系统来说,希望能做到PCB尺寸小,BOM成本低以及简单可靠,低功耗等特点,针对这系列的需求,飞思卡尔半导体推出针对汽车三相无刷电机的单芯片解决方案S12ZVM家族。S12ZVM是目前市场上集成度最高的无刷直流(BLDC)电机控制解决方案,有助于加快从直流(DC)到BLDC电机的过渡。
1 S12ZVM特点
飞思卡尔S12ZVM系列是具有突破性的技术,它将MCU、MOSFET栅极驱动单元、电压调节器和本地互联网络 (LIN) 物理层这四个系统元素结合到一个单芯片解决方案中,如图1。通常实现这四个功能需要两至四个芯片。与其它分立式解决方案相比,飞思卡尔通过片上集成将印刷电路板所占物理空间减少了50%。同时汽车制造商不断寻求可减轻汽车重量和降低功耗的方法,因为这有助于提升燃油经济性。电子系统供应商和电机制造商也正在迎合这一趋势,但是在面对定制的解决方案时,他们获得的解决方案往往不是最优的,或不具有可扩展性。S12ZVM系列提供诸多不同的产品版本,支持CAN和LIN通信协议,具有多种存储器容量和封装选项。 这将允许客户可重复使用硬件和软件设计,为空调风机、雨刮器、燃油泵和水泵等应用开发真正的平台解决方案。
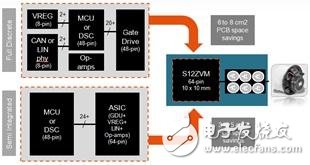
图1 S12ZVM集成方案
2 无传感BLDC控制系统设计
如图2所示,三相BLDC电机控制可采用三相六拍的控制方法,每隔60个电角度进行换向控制,同时对三相桥PWM控制可采用单极性控制策略,上桥采用PWM控制,下桥可直接导通与地相连,其优点在于控制简单,较低的MOS管开关损耗及较低的EMC噪音。
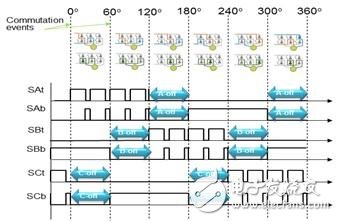
图2 三相六拍单极性控制策略
图3为采用S12ZVM的无传感BLDC控制系统设计框图,除了三相桥与采样电阻之外,整个控制都可以由S12ZVM内部来实现。当采用三相六拍控制策略时,只需要一个采样电阻来检测电流的大小,S12ZVM内部有运放可以对电流信号进行放大并通过AD模块进行采样,同时还可以将放大的电流信号经过比较器与给定的电压进行比较做过流保护。图中蓝色部分为S12ZVM的硬件模块,而绿色部分则由软件来实现功能。AD模块采样相电压,DCBUS电压和工作电流,经过过零点检测算法来确定换向控制并计算BLDC实际速度,速度环的PI控制器对实际速度和设定速度差值进行计算,从而决定PWM的占空比来控制BLDC电机转动力矩,保证实际速度按照设定的速度运行。
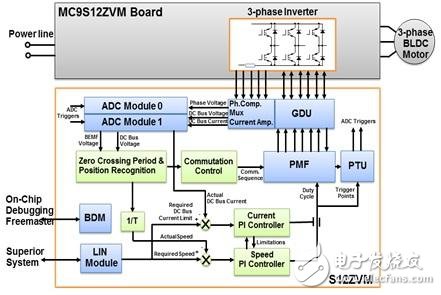
图3 S12ZVM BLDC无传感控制框图
由于无法确切知道BLDC无传感电机的初始位置,其启动过程要比带Hall传感器BLDC电机的启动过程复杂。如图4所示,其启动过程包括Alignment阶段,Open Loop Starting阶段及最终的Run阶段。在Alignment阶段,控制器同时施加相同占空比的PWM给A相与B相,C相则与地相连,这样就将BLDC电机稳定在一个已知的位置。占空比的大小与持续的时间取决于BLDC电机特性和负载大小,通常持续时间在100ms到500ms之间。当Alignment过程结束后,就进入Open Loop Starting阶段,由于反电动势与转子转速成正比,在极慢的转速下反电动势的幅值很低,很难检测到过零点。因此,当电机从静止状态启动时必须采用开环控制,待有足以检测到过零点的反电动势时,才转而采用反电动势检测控制并进入Run阶段。当进入到Run阶段后,BLDC就采用速度闭环控制,过零点由反向电动势检测所得。
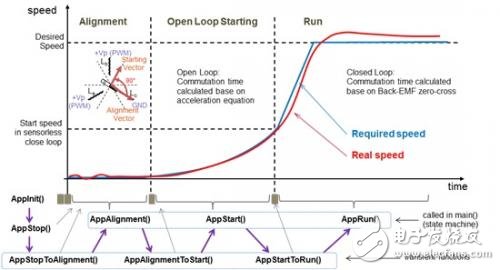
图4 BLDC无传感控制启动流程
3 无传感位置检测实现
依靠Hall传感器的运行实现起来非常容易,但除去hall传感器可降低系统成本并提高可靠性。BLDC电机转动时,每个绕组都会产生叫做反电动势的电压,根据楞次定律,其方向与提供给绕组的主电压相反。反电动势主要取决于三个因素:转子角速度,转子磁体产生的磁场,定子绕组的匝数。
当采用传感器时,MCU会根据hall信号来决定BLDC换向点。当采用无传感控制时,则可以采用反电动势过零点检测来决定正确的换向点,如图5所示。
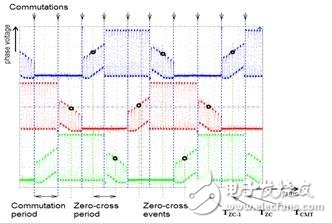
图5 BLDC反电动势过零点
当在一个恒速情况下,切换周期等于过零点周期,途中圈圈待表着过零点发生的地方,一般处在两个切换点的中间。所以通过timer得出上一次过零点时间以及本次的过零点时间,就可以计算出正确的换向点。
其中: –实际过零点时间, –上次过零点时间, –下次换向点时间, –范围在0.3-0.5的常数 (取决于电机参数)。
所以,成功检测反电动势过零点就决定了无传感控制BLDC成功的关键。如图6所示,通常有硬件和软件两种方式来能检测到反电动势过零点。第一种是采用三个硬件比较器,在某切换周期中不加电的一相可以通过相应的硬件比较器与1/2的Udcb电压进行比较,在PWM周期中On有效时,比较器能够检测到反向电动势电压变化从而得出过零点的位置。第二种方式可以用软件AD采样来实现,在BLDC电机运行过程中,使用ADC对不加电的一相进行采样,与此同时Udcb会被另一路ADC模块同时采样,然后软件可以实时的根据两个采样数值进行过零点判断。
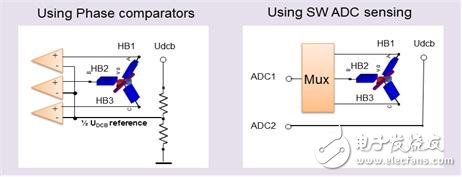
图6 BLDC反电动势过零点检测方法
采用比较器的方式可以降低CPU的负担,但软件采样的方式更加的灵活,可以更加精确检测出过零点的位置。S12ZVM同时集成了实现上述两种方式的硬件模块,内部包括三个相位比较器来实现硬件比较,AD模块包括两个独立的AD convertor来实现软件采样,两个AD convertor可以对反向电动势电压与Udcb电压的同时采样,确保过零点检测更加的准确。
当采用软件采样的方式时,必须要选择合适的采样点。图7显示在一个PWM周期中通电情况下反向电动势电压的变化情况。在PWM周期中ON有效时,SAtop管被打开接DCBUS,SCbot也打开与地相连。所以电流会从DCBUS经过SAtop管流过A相与C相,再进过SCbot管流入地,可见三相的中间点电压可以近似为DCBUS/2。此时在B相上产生基于DCBUS/2电压的反向电动势就可以被检测出正向与反向,这也意味着过零点的电压能够被成功的检测到。在PWM周期中处于OFF时,此时A相与C相的下桥分别与地相连,三相的中间点也就近似于与地相连,在这种情况就很难检测到B相反电动势的过零点。
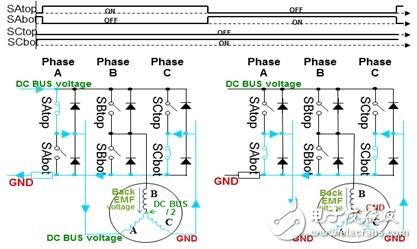
图7 BLDC反电动势采样点
由此可以发现,对反向电动势的检测只有在PWM周期中处于ON状态时才能实现。对于AD模块来说,就需要与PWM进行同步,配合定时延迟模块,可以在PWM周期中ON状态即将结束之前进行精确采样。S12ZVM有PTU可编程触发单元模块,其内部包含一个16bit计数器,两个独立的触发发生器,可以配置高达32个触发事件,同时可以根据PWM模块的Reload事件来启动PTU触发过程。图8可以很形象的理解无传感检测反向电动势的采样过程,PMF/PWM产生一个PWM Reload信号给PTU单元,PTU单元中的16bit Counter开始计数,PTU会在T2这个时间点产生一个触发事件来触发ADC0与ADC1分别对反向电动势与DC bus电压同时采样,当ADC采样转换结束后就产生一个ADC中断,在ADC中断服务子程序中就可以做反向电动势过零点的判断等操作。
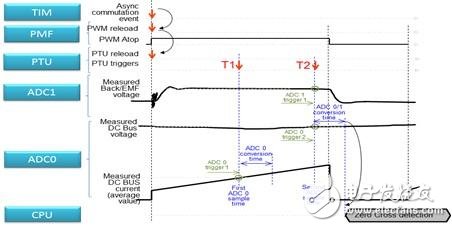
图8 BLDC反电动势采样策略
-
飞思卡尔三相无刷无感电路2025-03-12 3509
-
飞思卡尔智能小车S12完整资料2012-11-20 8533
-
飞思卡尔XS128芯片在proteus中怎麽画2014-08-07 2798
-
飞思卡尔S12芯片入门教程2016-03-30 10476
-
求飞思卡尔芯片mc9s12xs128的头文件2017-03-27 3324
-
基于S12ZVM的车用BLDC无传感控制方案2018-11-06 2601
-
收购飞思卡尔芯片 回收飞思卡尔芯片2021-06-10 1114
-
如何对基于S12ZVM的FOC正弦波堵转检测进行测试2021-08-10 1813
-
请问基于S12ZVM的NXP单电阻FOC电流重构是什么原理?2021-09-24 1197
-
Freemaster的S12ZVM大电流评估板连接问题如何解决?2023-03-23 538
-
将S12 ZVM的MBDToolbox添加到Matlab一直不成功是为什么?2023-04-18 592
-
飞思卡尔推出S12 MagniV系列单芯片MCU S12VR642011-06-22 3691
-
飞思卡尔S12ZVM混合集成芯片在车用BLDC中的应用方案详解2018-02-13 10802
-
基于S127VM的车用无传感器BLDC堵转检测2021-03-09 1178
全部0条评论

快来发表一下你的评论吧 !
