

常见的表面测量方法简介
描述
可实现更小晶体管的下一代技术是高数值孔径EUV光刻。
眼睛是心灵的窗户,人脑接收到的信息80%都是来自于眼睛,同时,大脑处理来自眼睛信息所消耗的能量占比也相当大。人眼只对波长大致在400nm-700nm的光起反应,在这个波段内的光我们称之为可见光,可见光在自然界中只占一小部分,如图:
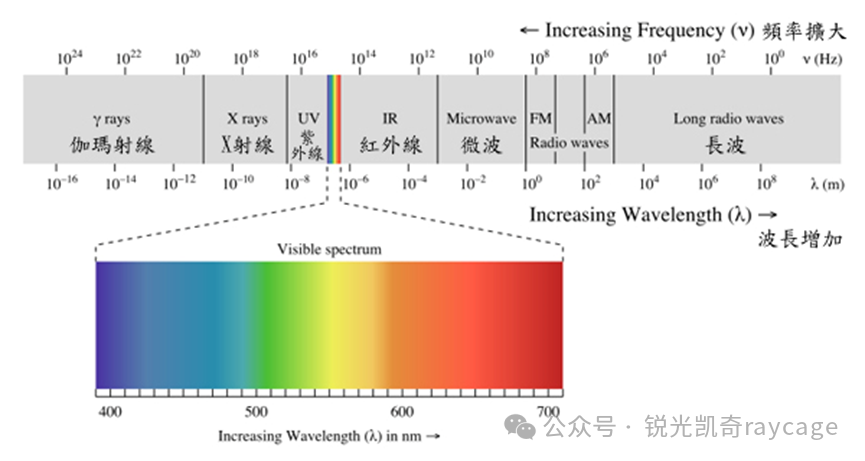
图1 光谱图
可见光中波长长的光线,人体肉眼感知为红色,短的感知为紫色,所以在700nm以外的不可见光我们称为长波红外,在400nm以外的不可见光我们称为短波紫外;红外光分为近红外(0.75-3um)、中红外(3-6um)、远红外(6-15um)、极远红外(15-1000um);同样的,紫外波段也分为真空紫外(10-100nm)、短波紫外(100nm-280nm)、中波紫外(280nm-320nm)、长波紫外(320nm-400nm)。光的波长不同,往往也有着不同的用途,其中红外光可以用于促进植物生长,现在很多蔬菜大棚里面就会使用此类光线照射植物,促进生长,另外他也是热量传递的主力军,一般的写字楼或者玻璃在做隔热层的时候,一般也都是针对于红外光做隔离。相比于红外光紫外光就比较危险,他的波长短,能量较高,可以直接杀死一般的细菌或者病毒,平时在太阳下面晒被子,主要就是利用了太阳光中的紫外线;紫外线除了能够消毒杀菌之外,也会对我们人体造成不可逆的损伤,长时间接触紫外线可能会有致癌风险,同时我们的眼睛虽然看不见,但并不妨碍他损伤我们的眼睛,紫外线射入眼睛也可能会让我们的眼睛失明,所以我们要慎重使用紫外线,以及一些带紫外线的产品,比如我们常见的紫外杀菌灯,或者做美甲用的紫外灯等。
紫外线虽然对我们的影响十分的严重,但同时,他也推动着我们社会的进步,在光学加工领域,加工精度一般和光源波长成正相关,其中最顶尖的光刻机里面用到的极紫外光的波长只有十几个纳米,也正是因为有了它,才有我们现在的手机芯片、电脑芯片等;同时在光学加工中,加工精度的上限往往是你的检测精度,只有在能检测出需要的精度的情况下,才能加工出需要的精度,所以检测手段往往也非常重要。
在高精度检测领域,常用的手段有以下几种:
1、机械探针:机械探针法是目前开发较早并且研究最为充分的一种表面形貌检测方法,目前仍被广泛应用于物体表面形貌的测量,是一种基本的表面轮廓测量方法。这是因为触针式轮廓仪具有直观、操作简单等特点,能够满足绝大多数情况下的检测需求。它利用机械探针和待测样品表面接触,当探针沿着待测样品表面移动时,样品表面微小的凹凸不平都会使得探针跟随表面上下起伏,和探针组合在一起的位移传感器能够获得探针的移动量,所测得的数据再经过计算机进行适当的运算处理就可以得到待测样品表面的三维形貌信息。探针式轮廓仪的纵向测量精度可达0.1-0.2nm,纵向分辨率取决于配套的相移传感器;横向分辨率与探针针尖半径和待测样品表面形貌有关,一般可达0.05-0.25um。这种检测方式具有测量范围大测量精度高和结构简单等优点,但是由于要和待测样品表面进行直接接触,所以极易损坏待测样品的表面形貌,不适合测量铜、铝等软金属表面或者表面涂有光刻胶的样品。同时因为机械探针法是一种逐点扫描的测量方式,因此耗时长、检测效率比较低综上各种原因,机械探针法的适用范围受到很大限制。
2、扫描电子显微镜(SEM):扫描电子显微镜的工作原理是利用一束极细的电子束扫描待测样品表面,在待测样品表面激发出次级电子,次级电子的多少与电子束的入射角有关,即与待测样品的表面结构有关。次级电子由探测器接收并转换为光信号,再经过光电倍增管和放大器转变为电信号来控制荧光屏上的电子束强度,显示与电子束同步的扫描图像,此图像是立体图像,反映了待测样品的表面结构。扫描电子显微镜具有较高的横向分辨率和纵向分辨率,可以分别达到2nm和10nm的测量精度。但是这种方法需要在真空的环境下才能工作,且SEM样品的制备过程非常复杂,同时要求待测样品具备一定的导电性,操作复杂、费时且不能提供真实的三维数据,测量范围也有很大的局限性并且价格非常昂贵,因此目前仅适用于微观结构缺陷的扫描检测。
3、扫描隧道显微镜(STM):扫描隧道显微镜的工作原理非常简单,将电荷放在探针上,电流从探针流出通过整个待测样品到达样品的底层表面。每当探针通过单个原子,流出的电流就会发生变化,电流的变化被记录下来就可以得到轮廓。扫描隧道显微镜有两种工作模式,恒电流模式和恒高度模式。恒电流模式是利用一套反馈电路使得隧道电流保持不变,计算机控制针尖在待测样品表面进行扫描。因为要保持电流不变,所以探针与待测样品表面的相对高度也要保持不变,由此可以得到待测样品表面的高度信息即可得到待测样品的三维形貌图。恒高度模式是保持探针针尖的绝对高度不变,这样探针针尖与待测样品表面的高度差会发生变化,隧道电流的大小会随着高度差的变化而变化,通过计算机记录下隧道电流的变化并且转换成图像信号显示出来就可以得到三维形貌图像。这种检测方式具有原子级别的高分辨率,纵向分辨率可以达到0.001nm,横向分辨率可以达到1nm,也可以实时获取待测样品表面的三维形貌信息,可以适应不同的工作环境,但是和扫描电子显微镜一样,它也需要待测样品具有一定的导电性,同时扫描隧道显微镜的测量范围非常小,横向测量长度一般在几微米到几十微米量级,因而它只适用于超小超光滑表面形貌的测量。除此之外,扫描隧道显微镜的结构复杂、制造技术难度大等问题也限制其使用范围。
4、原子力显微镜(AFM):原子力显微镜工作时,把一个对微弱力极其敏感的微悬臂的一端固定住,在另一端固定一个微小的针尖,使得针尖和待测样品的表面轻微接触。因为针尖尖端的原子与待测样品表面的原子之间存在排斥力的作用,在整个扫描过程中控制这种力的大小保持恒定,让针尖在垂直于待测样品表面的方向上做起伏运动。通过计算机后期处理原子力大小与高度信息的关系,从而获得待测样品表面三维形貌的重建。原子力显微镜的纵向分辨率可以达到0.01nm。这种方法不需要对待测样品进行处理因此减少了对样品的损害,但它的检测速度慢、检测范围比较小(横向测量长度只能达到10mm量级)并且受探头影响较大,因而适用范围受到限制,常用来测量线条宽度而很少用于测量表面形貌。二十世纪五十年代,光学技术被引入进行表面形貌测量,从而实现非接触式测量。其中就包括了白光干涉显微术。
5、白光干涉显微术:白光干涉显微术的工作原理如图所示。采用低相干光源,一般为白光LED、卤素灯等;从待测样品表面返回的测试光束与参考镜返回的参考光束相互干涉产生干涉条纹,在两者的零光程差位置处,出现干涉极值,此时条纹的对比度最好。和单色光干涉情况不同,白光干涉信号是由多种不同的单色光干涉信号组合而成,可以看成是由多个不同周期的余弦函数叠加而成的,因此在不同扫描位置处,两束光的干涉强度不同。当测试光与参考光的光程差为零时,干涉信号最强,因此可以通过在光强极值处寻找对应的纵向高度信息。和单色光干涉检测法相比,白光干涉利用了白光宽光谱的低相干性,避免了相位模糊的问题,实现了对微纳元器件表面三维形貌的高精度检测。由于白光干涉显微术具有非接触检测、大测量范围、高分辨率等特点,使得它被认为是最有应用前景的微纳结构测量技术,因而受到广泛关注。
目前成熟的商业化白光检测仪器,也叫白光干涉仪,它的检测纵向分辨率能够达到0.1nm,常用的白光干涉仪可以大致分为下面三种:Michelson、Mirau、Linnik。
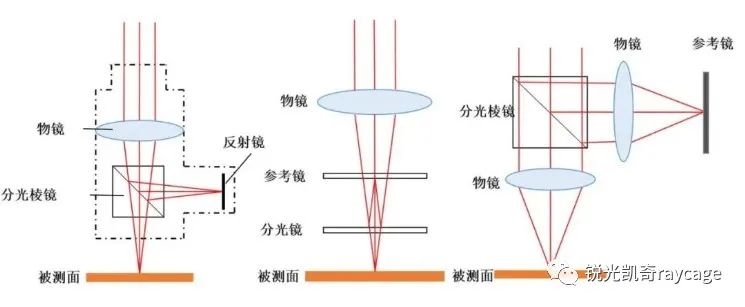
图2 三种常见的白光干涉结构
上图为三种常见的白光干涉结构,从左到右依次为:Michelson、Mirau:此类结构的白光干涉仪与传统显微镜结构一致,在传统反射式照明显微镜的基础上将物镜改为干涉物镜即可,干涉物镜相对于传统物镜来说,需要在物镜最前方放置分光棱镜,并在侧边放置参考反射镜(Michelson),或者放置分光片和正上方放置小尺寸反射镜(Mirau);两种结构都需要占用物镜前方空间,从而在物镜设计以及长工作距离应用场景下,不能得到很好的利用;同时,Michelson的物镜体积比较大,且稳定性欠佳;Mirau结构的物镜由于是同光路设计,所以抗干扰能力会比较强,但同时光路中心有小尺寸反射镜会挡住一部分光线。
Linnik:此结构利用分光棱镜和两个一样的物镜同时对两个样本成像,一个是反射镜(我们称为参考臂),一个则是我们的样品。这种结构相对于前两种来说,使用两只普通物镜,不需要在物镜前方放置分光装置,在物镜的设计和成本上都有着非比寻常的优势,同时物镜的选择不受限,市面上的物镜都可以使用,无论是长工作距离,还是浸油的高NA物镜,都能使用
-
常见的三维测量方法和工具2024-12-30 2688
-
国内常见的石油管道外径测量方法?2024-09-29 2903
-
数字示波器的测量方法有哪三种2024-07-17 4276
-
晶圆表面形貌及台阶高度测量方法2023-11-02 2224
-
光学表面的散射测量方法发展的趋势2023-09-08 3163
-
常见的电流测量方法有哪些,其各自的优点是什么?2021-04-08 2475
-
差分探头差分信号的常见测量方法有哪些2020-10-26 8613
-
大型反射面天线表面精度全息测量方法2018-01-09 2462
-
示波器高压差分探头的了解及常见测量方法2015-12-17 7102
-
汽车音响功放功率定级和测量方法简介2012-08-17 3330
-
频率测量方法的改进2010-10-14 1068
-
热工测量的概念和测量方法2010-09-14 761
-
基本电能质量测量方法和常见问题原因2009-10-10 896
-
模拟测量方法和数字测量方法2009-07-13 1119
全部0条评论

快来发表一下你的评论吧 !
