

UWB 3D 定位算法与上位机方案
描述
基于恩智浦S32K144、NCJ29D5D与KW38的UWB 3D定位方案,提供了更高的定位精度和强大的防中继能力。该方案通过双边双距测距方式,实现钥匙在三维空间中的精确定位。
一、UWB 3D DEMO 介绍
1.1 概述
世平基于恩智浦 S32K144、NCJ2 9D5D 与KW38的 UWB 3D 定位方案,该方案遵循 3C 协议,UWB 具备更高的定位精度,以及更强的防中继能力。
UWB DEMO 利用双边双距测距方式对钥匙进行测距,距离数据传输至 BCM 处理,结合 3D 算法计算出钥匙在三维空间上的坐标。
测试 UWB 定位效果,钥匙在 DEMO 基站内部,钥匙环绕 DEMO 基站外部。
1.2 UWB 3D DEMO
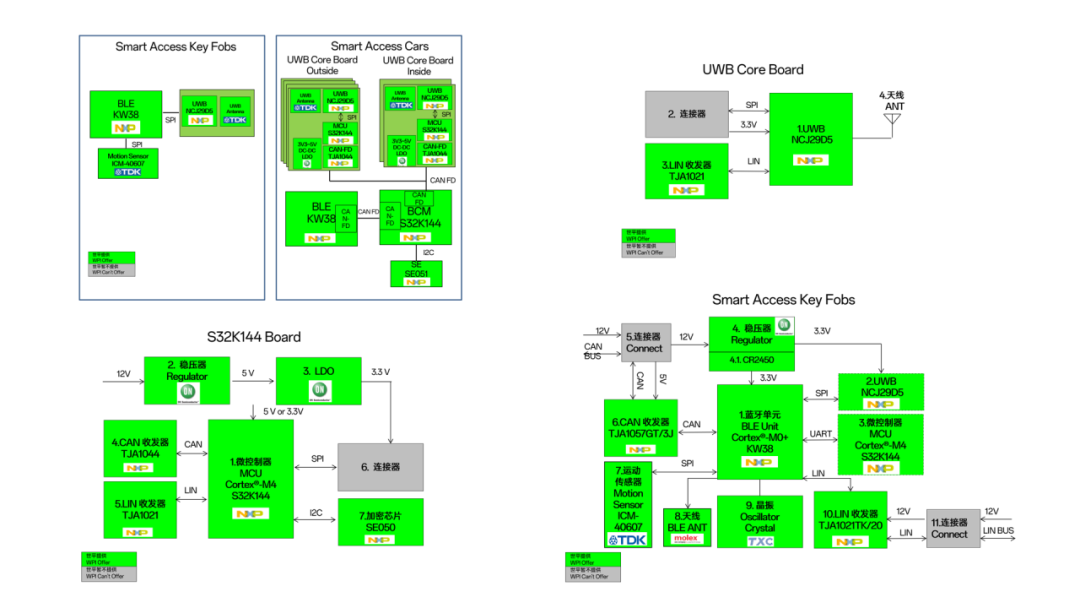
UWB System Development Kit 是用 S32K144 评估板、NCJ29D5D 评估板和 KW38 评估板搭配而成的 UWB 测距定位评估套件。这三个板子相互搭配之后形成了 UWB 锚点、 BCM、 BLE 锚点和 Keyfob,通过 Keyfob 与 UWB 锚点的通信测距,汇总到 BCM 之后进行计算。
1.3 UWB 3D 定位算法概述
在获取四个锚点到钥匙的距离之后,就可以计算钥匙的位置,计算钥匙使用的是最小二乘法的方式,找出方差和最小的解。
二、UWB 3D 上位机介绍
2.1 概述
UWB 3D 上位机基于 Python 与 QT GUI 开发,通过 UART 通信方式实现板与 PC 间传输数据,上位机实现三维界面中实时显示 UWB 钥匙坐标、设置有迎宾区、解锁区,通过动画演示车门解锁等应用场景。
2.2 3D 显示功能介绍
3D 界面区主要功能是将钥匙、汽车模型、迎宾区、解锁区显示在三维空间中以及三维效果的演示,界面包含 3D 显示界面、钥匙实时坐标、3D 显示界面视角控制按键。
2.3 上位机状态功能介绍
功能状态区主要功能是显示目前功能的状态,包含功能状态图标如连接设备、钥匙进入迎宾区、钥匙进入解锁区,都会触发对应状态图标的激活。
2.4 上位机配置功能介绍
上位机配置区主要功能是配置上位机与 UWB BCM 通信包含:
串口配置 - 用于配置串口通信波特率、数据位、校验位、停止位等通信参数;
UWB 锚点坐标设置 - 用于锚定五个参考锚点在空间中的坐标;
滤波数据数量控制 - 用于配置参与滤波数据的数量;
迎宾区解锁区范围 - 用于控制 3D 界面中迎宾区、解锁区的范围;
运行日志 - 用于打印上位机运行中的状态、LOG;
►展示板照片
►方案方块图
►核心技术优势
• 基于 Python 与 QT GUI 上位机显示界面
• 配置与 UWB BCM 串口通信功能
• 上位机状图标态、实时数据显示功能
• 3D 汽车模型、车门动画、迎宾区与解锁区范围功能
• UWB 钥匙坐标数据可视化
• 三维界面视角可自由控制
• 钥匙坐标数据滤波
• 工程多线程运行
►方案规格
UWB 3D 定位算法功能 :
• BCM 与 PC 上位机、板载上位机 UART 通信功能
• BCM 通过 UWB 3D 定位算法对测量值进行滤波处理
• BCM 通过 UWB 3D 定位算法计算目标钥匙三维坐标功能
UWB 3D 定位算法精度 :
• 应用环境:四锚点搭建 X 轴 3.6m、Y 轴 1.8m、Z 轴 40cm 的环境,四锚点坐标为 ( 90, 180, 0 )、 ( -90, -180, 0 )、 ( -90, 180, 20 )、 ( 90, -180, -20 )
• 测量范围:钥匙与锚点间角度大于 10°、测量距离 5m 内
• 定位精度:±20cm(应用环境下测量范围内)
上位机 PC 端界面功能:
• 三维界面,三维空间中显示锚点、目标钥匙的空间坐标、迎宾区、解锁区、车门解锁等应用动画。
• 配置界面,配置锚点、串口连接等参数信息、UART 通信功能,上位机通过 UART 接收从 BCM 数据帧。
• 信息窗口,显示上位机运行状态、数据信息的窗口。
登录大大通网站,了解更多详情,提问/评论,获取方案技术文档等更多资讯!
-
UWB定位系统2009-03-20 0
-
UWB定位系统的定位原理和主要特点2018-10-30 0
-
UWB定位系统工厂人员定位解决方案2018-11-26 0
-
UWB超宽带室内定位技术2018-11-28 0
-
基于UWB定位技术的定位系统2018-12-21 0
-
UWB定位技术之定位算法:RSS、AOA、TOA、TDOA2019-06-28 0
-
UWB定位系统应用方案:智能巡检、智能考勤、访客管理2020-03-31 0
-
影响UWB定位精度的8个主要的原因2020-12-04 0
-
影响UWB高精度室内定位的7大因素2021-02-18 0
-
3D图像生成算法的原理是什么?2021-06-04 0
-
UWB室内定位系统的三种定位算法_95power2019-11-01 16095
-
深度剖析3D视觉定位技术2021-04-01 4469
-
UWB室内定位系统TDOA算法方案介绍2023-03-08 1269
-
解决方案|3D视觉引导镜片镀膜自动上料2023-06-14 654
-
【大大芯方案】高精度实时定位,大联大推出基于NXP UWB 3D定位算法与上位机方案2023-10-12 1414
全部0条评论

快来发表一下你的评论吧 !
