

CAN总线实现运动控制系统网络化的软硬件设计
通信网络
描述
为引入CAN总线技术以实现运动控制系统的网络化。提出了基于LPC2294的CAN总线主节点的硬件及软件设计方案。硬件采用基于ARM7内核的微控制器LPC2294,使用CTM1050T作为CAN收发器,设计了带有CAN总线以及以太网接口的硬件电路,并进行了SRAM、NORFLASH与NAND Flash的扩展。软件采用μCLinux作为操作系统,并开发了CAN控制器的驱动程序,实现了CAN总线的各种功能。通过制作样机并进行实验,验证了这一方案的有效性。
CAN(Controller Area Network)即控制器局域网络,是国际上应用最广泛的现场总线之一,已经成为计算机控制系统和嵌入式工业控制局域网的标准总线。网络化运动控制系统(Networked Motion Control SystEMS)就是构建在控制器与电机驱动器之间,能够实时、同步地传送运动控制指令和接收运动状态,并且控制闭环通过网络连接的运动控制系统。为引入CAN总线技术以实现运动控制系统的网络化,笔者提出一种基于LPC2294的CAN总线主控制节点的硬件及软件设计方案,具有高性能、高可靠及良好扩展性的特点,非常适用于运动控制系统。
1 总体设计
主节点采用ARM7内核的LPC2294微控制器,使用RTL8019AS作为以太网控制器,软件上采用具有网络功能强、性能稳定、移植性好的μCLi nux作为操作系统。基于CAN总线的运动控制系统,主要由1个主节点(主控制器节点)、若干个从节点(电机控制节点)以及1台计算机构成,主节点与从节点之间通过CAN总线进行通信,主节点与计算机之间则通过以太网进行通信,如图1所示。
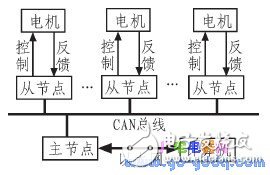
图1 运动系统控制结构
主节点主要功能包括:1)通过CAN总线发送电机控制信息给从节点,并接收各从节点的反馈信息:2)通过以太网与计算机监控端进行通信,以实现远程监控。
1.1 整体硬件设计
主节点整体硬件结构如图2所示。
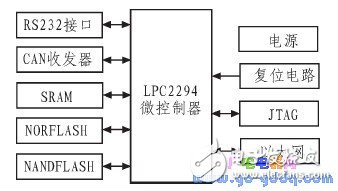
图2 硬件结构
主节点采用的LPC2294基于ARM7TDMI内核的32位处理器,带有256kB高速FLASH、16kB静态RAM,内部集成4路CAN控制器,支持SRAM、FALSH扩展。由于LPC2294内部集成CAN,因此外部只需CAN收发器与之连接。CAN收发器选用周立功的CTMl050T.CTM1050T是一款带隔离的高速CAN收发器,主要功能是将CAN控制器的逻辑电平转换为CAN总线的差分电平,并具有隔离功能(DC2500 V)、ESD保护功能及TVS管防总线过压功能。 LPC2294具有外部存储器控制器(EMC),通过该部件可以扩展更多的FLASH和SRAM以及以太网、USB等外设。主节点采用RTL8019AS作为以太网控制器,分别使用MT45W4MW16、SST39VF1601、K9F2G08UOA进行SRAM、NORFLASH、NANDFLASH的扩展。
1.2 软件结构
主节点软件结构如图3所示,U-Boot作为BootLoader(启动引导程序),负责初始化目标板硬件与引导操作系统。这里采用μCLinux作为嵌入式操作系统。μCLinux(mICrocontrol linux)即"微控制器领域中的Linux系统",主要是针对目标处理器没有存储管理单元(MMU)的嵌入式系统而设计的。它保留了Linux的大多数优点:稳定、良好的移植性、优秀的网络功能、对各种文件系统完备的支持和标准丰富的API.同时μCLinux包含大量的设备驱动程序,以及提供良好的驱动程序开发框架。驱动程序开发或配置主要包括CAN、以太网以及NANDFLASH3大部分。上层应用程序通过使用CAN接口函数、Socket接口以及库函数进行各种应用开发。整个系统的启动过程是:U-Boot把μCLinux内核从NORFLASH中加载到SRAM中,然后启动μCLinux,μCLinux初始化硬件及建立运行环境后,自动运行预设的应用程序。
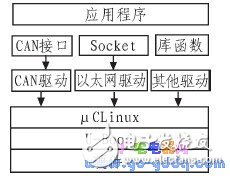
图3 软件结构
2 硬件设计
2.1 LPC2294最小系统
LPC2294采用LQFP144封装,最小系统需要模拟和数字3.3 V电源以及核心电源1.8 V.为了便于串口波特率的设置,外部接11.0 592 MHz晶振。P2.26(BOOT0)通过10 kΩ电阻上拉,P2.27(BOOT1)接一跳线座,通过跳线让P2.27可选择接高电平或低电平以选择从内部FLASH或外部NORFLASH启动。由CAT1025构成手动复位监控电路,提高了系统的可靠性。当SW按键按下时,CAT1025的2引脚输出持续为大于150 ms的低电平,LPC2294复位。在CAT1025的2引脚通过10 kΩ电阻上拉,防止产生错误的引脚输出状态,复位电路如图4所示。
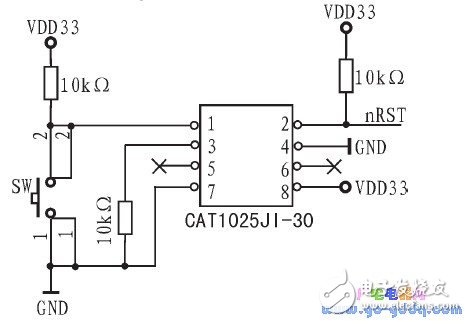
图4 复位电路图
-
分享一款不错的基于CPLD的臭氧电源控制系统的软硬件设计2021-04-29 1418
-
基于单片机实现总线控制智能数据采集模块的软硬件设计2019-10-31 4605
-
网络化测控系统的特点和实现2019-04-08 2118
-
汽车电子控制系统上的CAN总线通讯介绍2018-05-07 14279
-
汽车电子与CAN总线-汽车车身网络系统2015-08-18 16052
-
【FPGA参赛作品】基于FPGA的网络化电机传动控制系统2012-07-10 5154
-
基于LPC2294的CAN总线主节点设计2011-06-21 1227
-
网络化电机控制系统设计2011-01-10 653
-
基于调度的网络化控制系统2010-07-21 680
-
无刷直流电机闭环控制系统设计及软硬件实现2009-12-18 39006
-
基于CAN总线的网络化PLC技术研究与实现-硕士学位论文2009-10-31 3298
-
基于DSP的电源控制系统的软硬件开发2009-07-30 755
-
基于CAN总线的纺织测试仪器网络化系统2009-03-17 611
全部0条评论

快来发表一下你的评论吧 !
