

大象机器人推出力控夹爪myGripper F100
描述
随着机器人智能制造的浪潮席卷全球,市场对于精密、灵活且可靠的自动化解决方案的需求日益增长。
在电子3C领域、生命科学、新零售等领域,由高性能力控夹爪所加持的精确抓取需求正成为推动制造业升级的关键力量,据《2022年电动夹爪产业发展蓝皮书》显示,中国电动夹爪市场销量在2021年同比增长77.14%,市场规模同比增长59.52%,这一趋势预示着电动力控夹爪技术正逐渐替代传统气动夹爪,成为自动化领域的新宠。
力控夹爪以其高精度、高灵活性和智能化控制的优势,正在开辟一个新的市场蓝海。
深圳市大象机器人科技有限公司作为一家专注于轻量化协作机械人研发生产的国家高新技术企业,正式推出最新力作——myGripper F100力控夹爪,旨在适配大象机器人旗下轻量化协作机械臂生态和市面上大部分通用协作机器人,满足更多生产作业需求,为行业提供优质的机器人解决方案。
myGripper F100力控夹爪
myGripper F100 力控夹爪是一款高性能的机器人末端执行器,专为多功能抓取需求而设计。
适配大象机器人公司旗下多系列协作机器人,广泛应用于科研实验与教育培训、创客项目与机器人研发、服务机器人与人机交互、物流分拣与仓储管理等场景。
精准掌控,灵活抓取
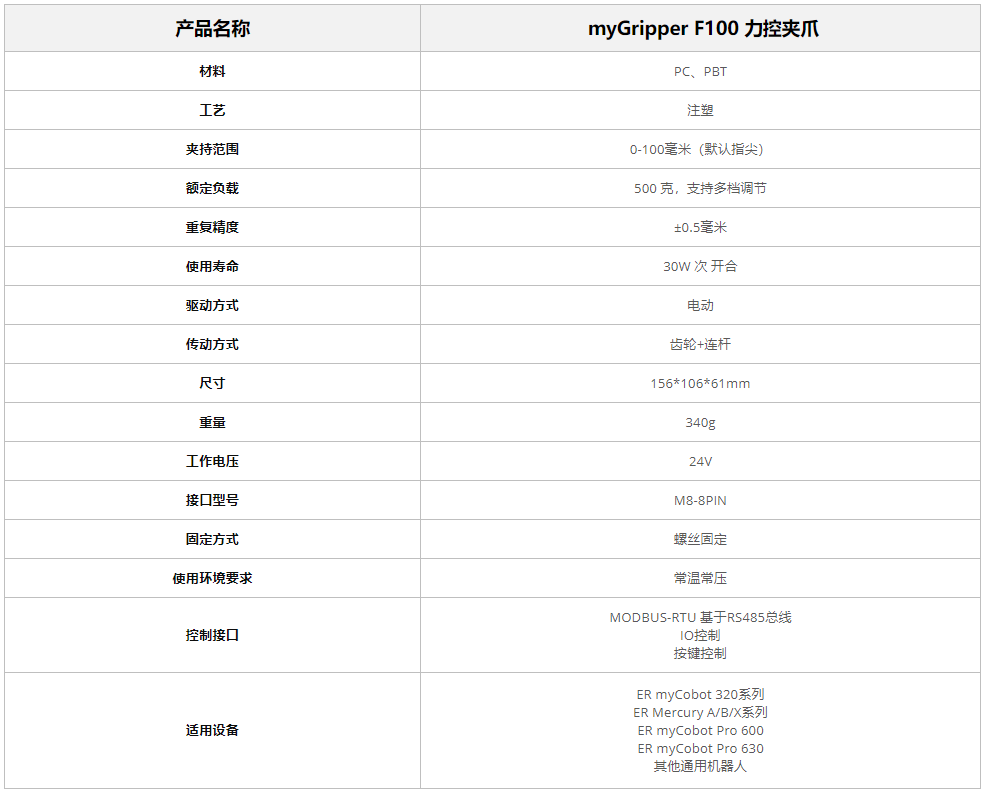
myGripper F100夹持范围0-100毫米(默认指尖),支持10级灵活力矩调节,控制频率最高达100HZ,可适应各种机器人夹取操作场景。
硬核参数,高效稳定
myGripper F100通体采用PC、PBT材料,经过精密注塑工艺制造,重量仅340克。
额定负载为500克,重复定位精度达0.5毫米,经反复测试,开合寿命可达30万次,保证长期稳定运行。
专为创客和科研人员量身打造,卓越性能为科研实验、教育培训、创客项目以及物流分拣等领域带来全新抓取体验。
● 实验操作:在科研实验中,完成试管、器皿等的抓取和移动,确保实验的安全和准确性。
● 教育演示:作为教学工具,帮助学生理解机器人抓取原理,培养实践能力。
● 物料搬运:在模拟生产线或仓储中,搬运各种规格的物料,提高工作效率。
实时监测,精准调节
myGripper F100采用内嵌显示屏设计,用户可以实时监测夹爪的操作状态和力矩调节,确保精确控制。
智能控制,便捷操作
myGripper F100支持MODBUS-RTU通信协议,IO控制和按键控制等三种操作模式,简化操作方式,降低应用门槛。
myGripper F100适配多种开发生态,用户可以通过灵活的编程与控制方式,轻松实现各种复杂的操作需求。
● Python支持:提供标准化的机器人驱动库,可通过PyPI下载安装,支持查询关节角度数据、笛卡尔坐标数据、编码器位置数据、速度数据等。
● ROS支持:支持ROS1和ROS2双版本,提供RVIZ仿真环境支持,允许用户实时显示机械臂状态并采集数据。
丰富生态适配
myGripper F100力控夹爪高度适配大象机器人轻量化协作机械臂生态,为用户提供一站式机器人智能抓取解决方案。
● myCobot 320 进阶级协作机械臂,进阶六自由度协作机械臂,开发ROS仿真环境,内置运动学正逆解算法,配备多个工业I/O接口,可拓展开发PLC自主编程,有M5、树莓派两个版本,350mm工作半径,1KG负载。
● myCobot Pro 630 专业级协作机械臂,具备精确动力学模型,防碰撞检测,采用六谐波关节模组,定制Linux操作系统、Roboflow机器人控制软件,开放USB、EtherNet/IP、RS485、24V-I/O等丰富接口,630mm工作半径,2KG负载。
● Mercury ABX专业级仿人机械臂,轻型七自由度机械人,有效负载为 1 公斤,搭载7颗大象机器人全新自研”力源“系列谐波模组。最大输出扭矩可达80Nm,编码器分辨率19bit,重复定位精度高达0.6弧分;
采用标准M8-8PIN接口,除大象机器人旗下机械臂生态以外还可与市面上大部分通用机器人实现无缝对接,快速集成。
myGripper F100力控夹爪现已正式上市,千元级高性价比力控夹爪,为您提供精准、灵活、高效的一站式机器人抓取解决方案,助力创意与科研突破。
-
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品2025-04-25 7104
-
大象机器人以科技治愈人心2025-02-20 1207
-
大象机器人推出首款三指灵巧手myGripper H1002025-01-21 1295
-
大象机器人11月大事件回顾2024-12-03 950
-
大象机器人10月大事件回顾2024-10-31 1292
-
自动化革命:大象机器人的Mercury A1机械臂2024-01-15 1369
-
金器工业:打造集成型机器人末端夹爪2021-01-07 3933
-
工业机器人搭配伺服电动夹爪的五大优势2020-07-27 3341
-
什么是工业机器人夹爪它有什么用2019-09-02 6336
-
桁架机器人的卡爪怎么维护?2019-01-22 703
-
大族机器人-夹爪2016-12-25 801
全部0条评论

快来发表一下你的评论吧 !
