

摄像头捕获 2D 图像,深度传感器拉长距离
描述
从自动感应水龙头到AR/VR 头戴设备、机器人和自动驾驶汽车--能够像人类一样“看到”周围世界的产品渐渐变得无处不在。为了制造出能够“看到”世界的产品,摄像头传感器是首选技术。然而,现实世界是三维的,但单独的摄像头只能捕获2D 图像。为了发挥作用,还需要使他们获得深度信息。例如:自动感应水龙头需要识别与手的距离、机器人和自动驾驶汽车需要检测到与物体的距离以避免碰撞、增强现实体验需要现实世界场景的3D地图。
深度传感技术可直接测量传感器与周围物体之间的距离。在必要时可以与2D图像数据相结合,使用同步定位与地图构建(SLAM)等技术,建立场景的完整3D图,获知场景内6个自由度位置.
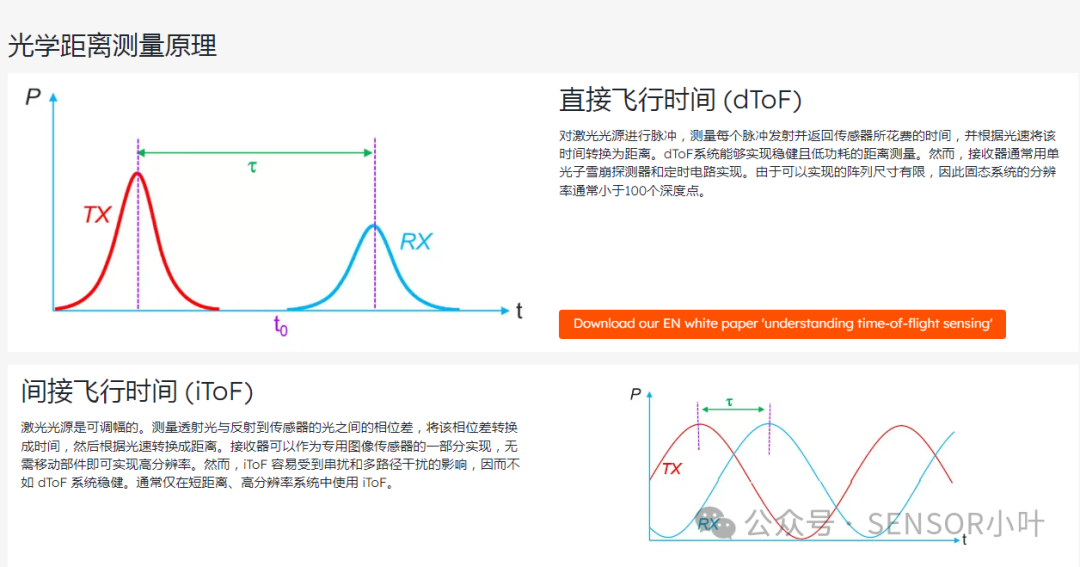
景深传感器是一种特殊的传感器,主要用于测量和感知物体或场景在三维空间中的深度信息,即景深。景深传感器通过特定的技术手段,能够获取物体或场景在三维空间中的距离信息。这种距离信息通常以景深图的形式呈现,景深图是场景中所有三维点的集合体,每个点代表一个物体或场景中的特定位置,并带有相应的深度信息。景深传感器的工作原理多种多样,但主要都是基于测量光线在物体表面反射后回到传感器的时间或相位差等参数来计算距离。例如,ToF(Time-of-Flight,飞行时间)传感器就是一种常见的景深传感器,它通过主动发射调制过的光源到目标面上,然后观察计算反射回来的对应光,发射和反射光之间的相位差通过运算和转换得到距离/景深。
VD55H1是一款低噪声、低功耗的672 x 804像素(0.54兆像素),间接飞行时间 (iToF) 传感器芯片,采用先进的背照式堆叠晶圆技术制造。结合940 nm照明系统,能够构建小型3D相机,产生高清深度图,典型测距距离在全分辨率下可达5 m,并且使用图案照明可以超过5 m。凭借在200 MHz调制频率下运行和超过85%的解调对比度的独特能力,该传感器产生的深度精度是典型100 MHz调制传感器的两倍,而多频率操作提供了远距离测距能力。低功耗的4.6 µm像素实现了先进的功耗表现,某些模式下平均传感器功耗降至80 mW以下。VD55H1通过MIPI CSI-2四通道或双通道接口以1.5 GHz的速度输出12位RAW数字视频数据。传感器帧率在全分辨率下可达60 fps,在模拟合并2x2下可达120 fps。意法半导体开发了专有的软件图像信号处理器 (ISP),将RAW数据转换为深度图、幅度图、置信度图和偏移图。也支持Android格式,如DEPTH16和深度点云。 该器件可以通过I2C串行接口进行全面配置。具备200 MHz低压差分信号 (LVDS) 和10 MHz、3线SPI接口,可高度灵活地控制激光驱动器。传感器针对低电磁干扰/电磁兼容性、多设备免疫性和简易校准程序进行了优化。
#GONGNENG#所有功能
超紧凑0.54兆像素iToF传感器芯片
672 x 804间接飞行时间 (iToF) 传感器芯片(0.54兆像素)
4.6 μm背照式快速光电二极管像素,1/4英寸光学格式
4.5 mm x 4.9 mm芯片采用先进的40 nm堆叠晶圆技术制造
实现低功耗、高精度深度图
像素在200 MHz调制频率下具有超过85%的解调对比度
低噪声电荷域像素(无kTC)低于5e-
支持多频率(多达三个频率)
平均传感器功耗降至80 mW
智能iToF调制,无需摆动误差校准
多用户干扰减少
优化低电磁干扰/兼容性
易于集成3D相机
在1.5 GHz MIPI CSI2接口上输出原始数据(四通道或双通道)
10/12位可配置ADC分辨率
传感器原始输出多达120 fps(深度电平帧率)
传感器控制:快速模式+I2C从机接口(多达1 MHz)
激光驱动器接口:LVDS和3线SPI
提供深度重建的软件ISP
-
意法半导体图像传感器的崛起之路2025-08-01 1906
-
摄像头芯片CMOS图像传感器的行业报告详细说明2021-02-23 2296
-
机器人视觉摄像头的技术类型2020-05-15 2679
-
摄像头传感器有什么类型?2019-08-15 8357
-
松下图像传感器“SmartFSI” 实现摄像头高画质薄型化2018-12-03 897
-
深度摄像头行业已然崛起2018-07-06 5623
-
摄像头芯片型号有哪些_摄像头芯片型号汇总2018-04-09 66373
-
如何用stm32完成摄像头捕获光源2017-08-30 4080
-
最新摄像头技术给车辆以强大的视觉功能2017-04-12 7378
-
用传感器控制摄像头的开启和关闭2016-04-08 5060
-
数码摄像头传感器类型/传感器像素2009-12-22 1509
-
摄像头的工作原理2009-08-02 29377
-
什么是图像传感器2009-04-25 1512
-
二、摄像头的安装调试2008-07-10 5809
全部0条评论

快来发表一下你的评论吧 !
