

传统PWM控制器的控制模型和仿真(反激、正激、半桥、全桥)
控制/MCU
描述
对于传统的 PWM 模式控制器,比如 UC384X 系列,能非常好的应用在反激和正激拓扑的控制上。电流模式固有的逐个周期电流限制和超快的动态响应,是非常优秀的性能。虽然 UC384X 系列已经蛮老了,不能用在现在追求5&6级能效的项目上。但是有些追求可靠性的领域,还是蛮喜欢用 UC384X 系列的。话不多说了,下面是参考其内部控制逻辑建立的仿真模型。
第一部分 传统定频反激
UC384X 的内部逻辑图:
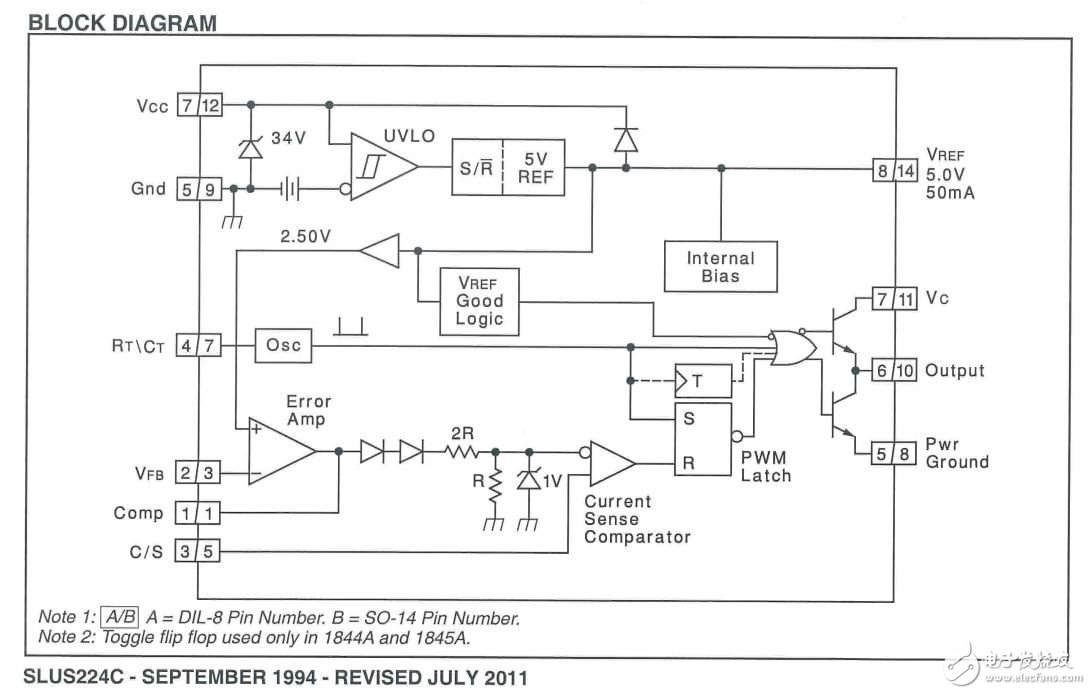
图1 UC384X 系列内部逻辑图
首先是一个90瓦的 CCM 反激,其控制逻辑参考 UC3842,可见下图:
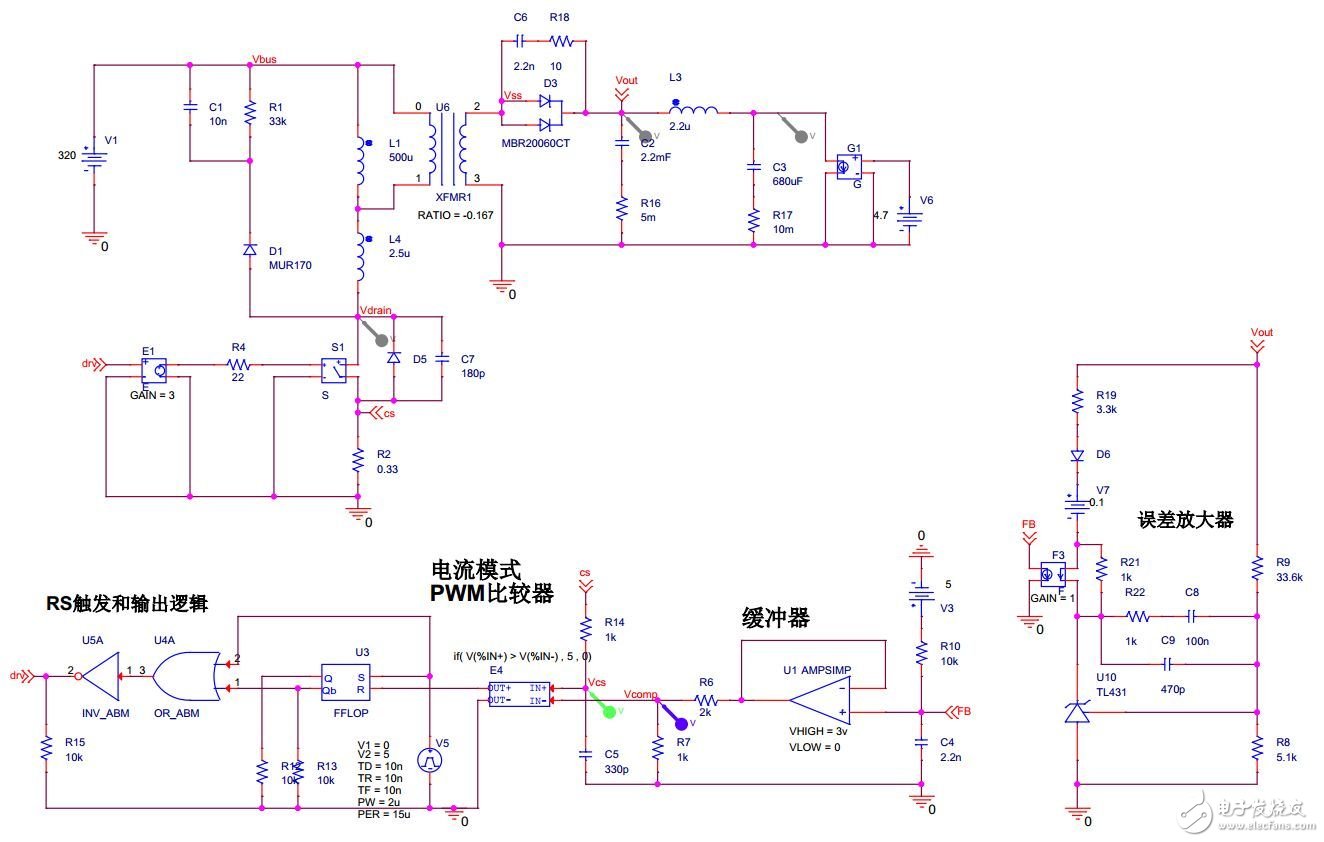
图2 U 固定开关频率的反激模型
模型说明:
由 V5 产生一个固定的置位时钟,RS 触发器和输出逻辑参考 UC384X。最关键的 PWM 比较器,由一个 if 语句替代,追求最快的仿真速度。用分压电阻和限制运放的输出,控制到 PWM 比较器的电压不高于 1V。误差放大器由传统的 TL431 替代,光耦用理想的流控电流源替代,于是可以得到仿真的波形:
20ms 的启机波形:
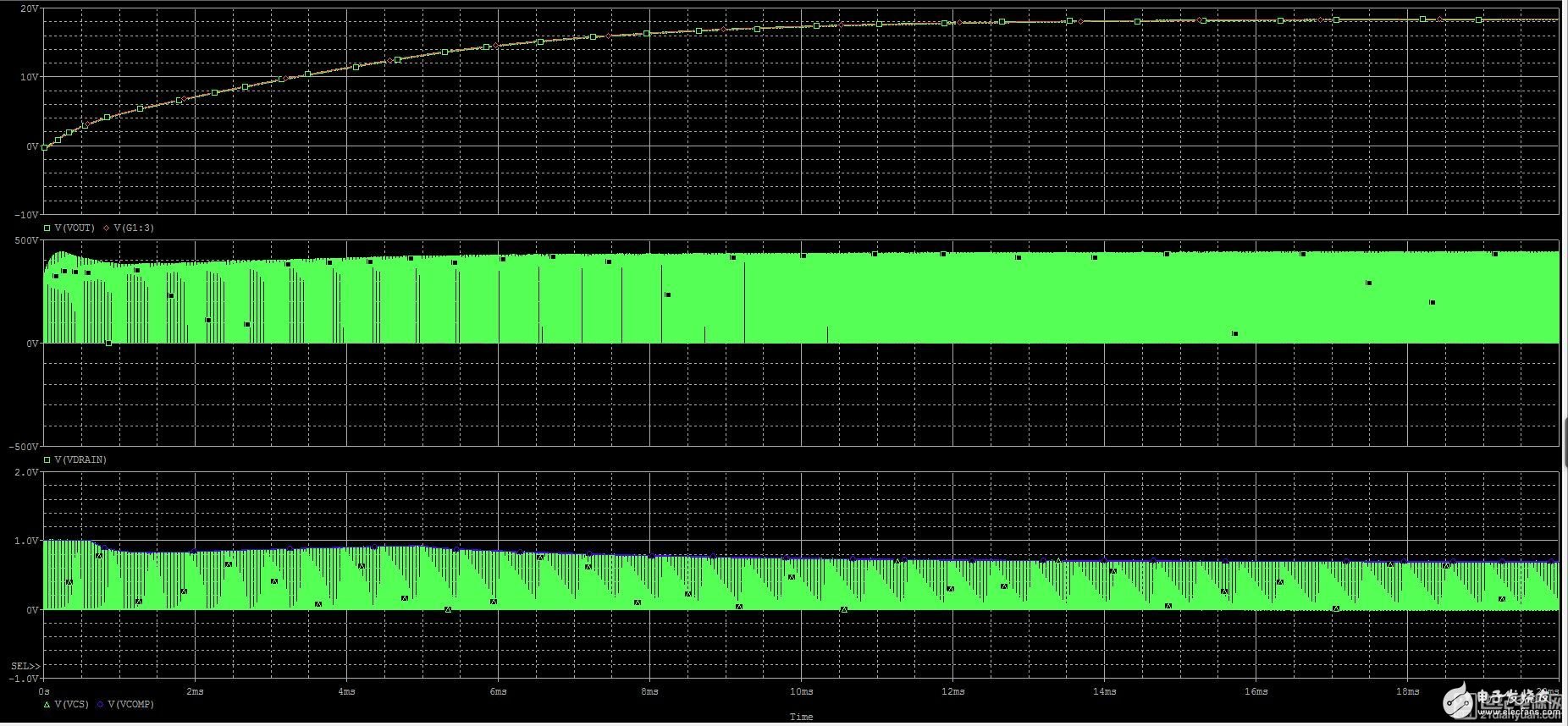
图3 反激的启机波形
展开细节:
✦ V(Vout)是差模电感之前的电压,纹波较大。
✦V(G3:1)是负载端的电压,基本纹波就比较小了。
✦V(Vdrain)是原边 MOS 漏极波形。
✦V(Vcs)是 PWM 比较器的电流信号。
✦V(Vcomp)是 PWM 比较器的给定信号。

图4 反激的几个关键点波形
做一个 0.5A ~4。7A 10ms 切换一次的动态响应测试:

图5 观察在动态负载时的工作波形
资料下载
仿真原理图: flyback_test_V1.pdf
仿真原文件: flyback_test_V1.zip
第二部分 传统定频正激
关于50%占空比的限制,可以参考下图,将 S 引脚脉宽设置到半个周期长度,那么 PWM 输出的最大脉宽就被限制住了。
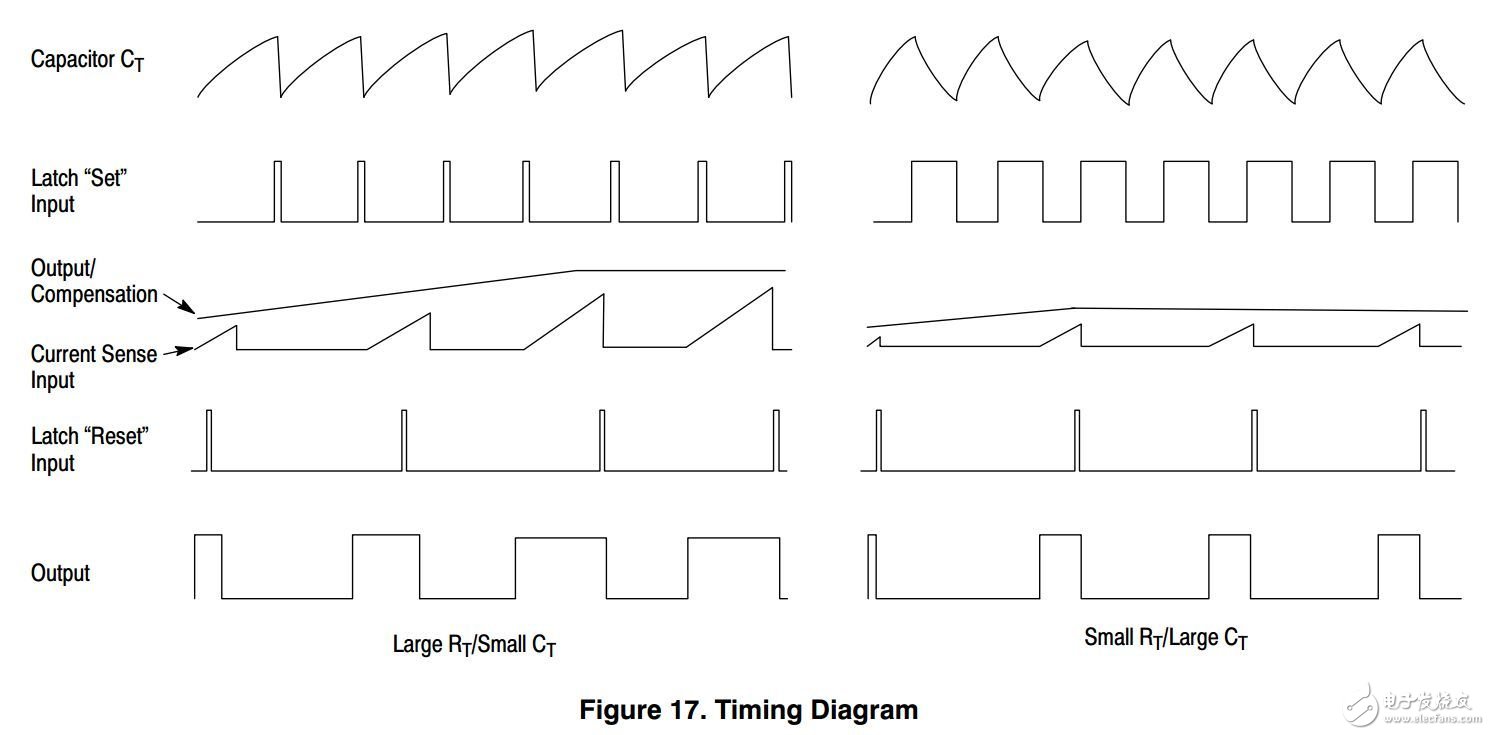
图6 UC384X 系列的控制时序图
仿真原理图:
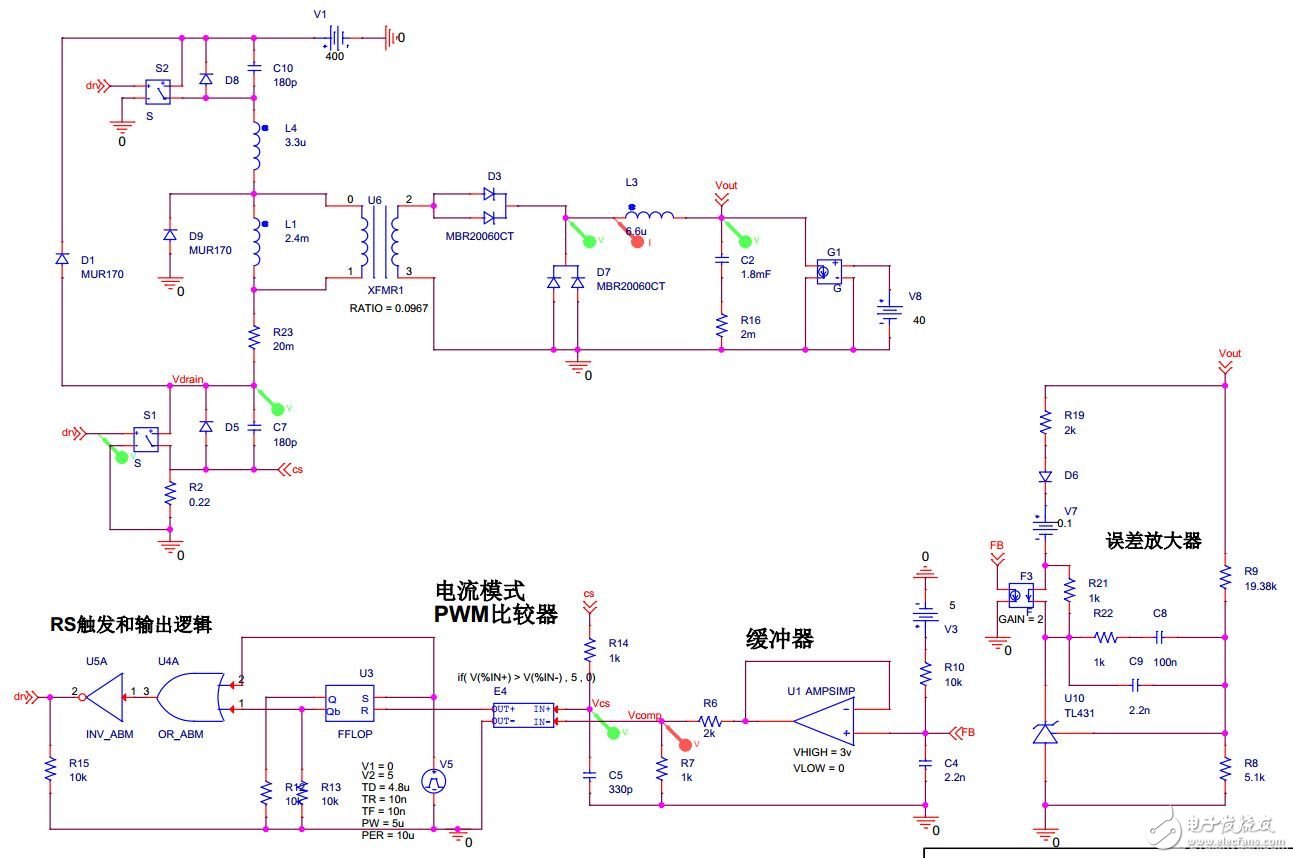
图7 UC384X 控制的双晶正激模型
模型说明:
为了加快仿真速度,对于双管正激 MOS 的体二极管几乎不走电流的情况下,就直接用理想开关代替。副边也直接用二极管做整流桥,同步整流稍微麻烦。输出用一个压控电流源来做理想负载,控制逻辑和反激几乎一样。
20ms 的上电波形

图8 正激启机仿真
展开细节:
✦V(Vdrain)是原边低端 MOS 的漏极电压
✦V(Vout)是副边输出电压
✦V(Vcs)是 PWM 比较器的电流信号输入
✦V(Vcomp)是 PWM 比较器的给定信号
✦V(D3:3)是副边滤波电感的输入电压
✦I(L3)是副边滤波电感的电流

图9 正激几个关键点波形
做 5 A~40A 10ms 一次的切换:
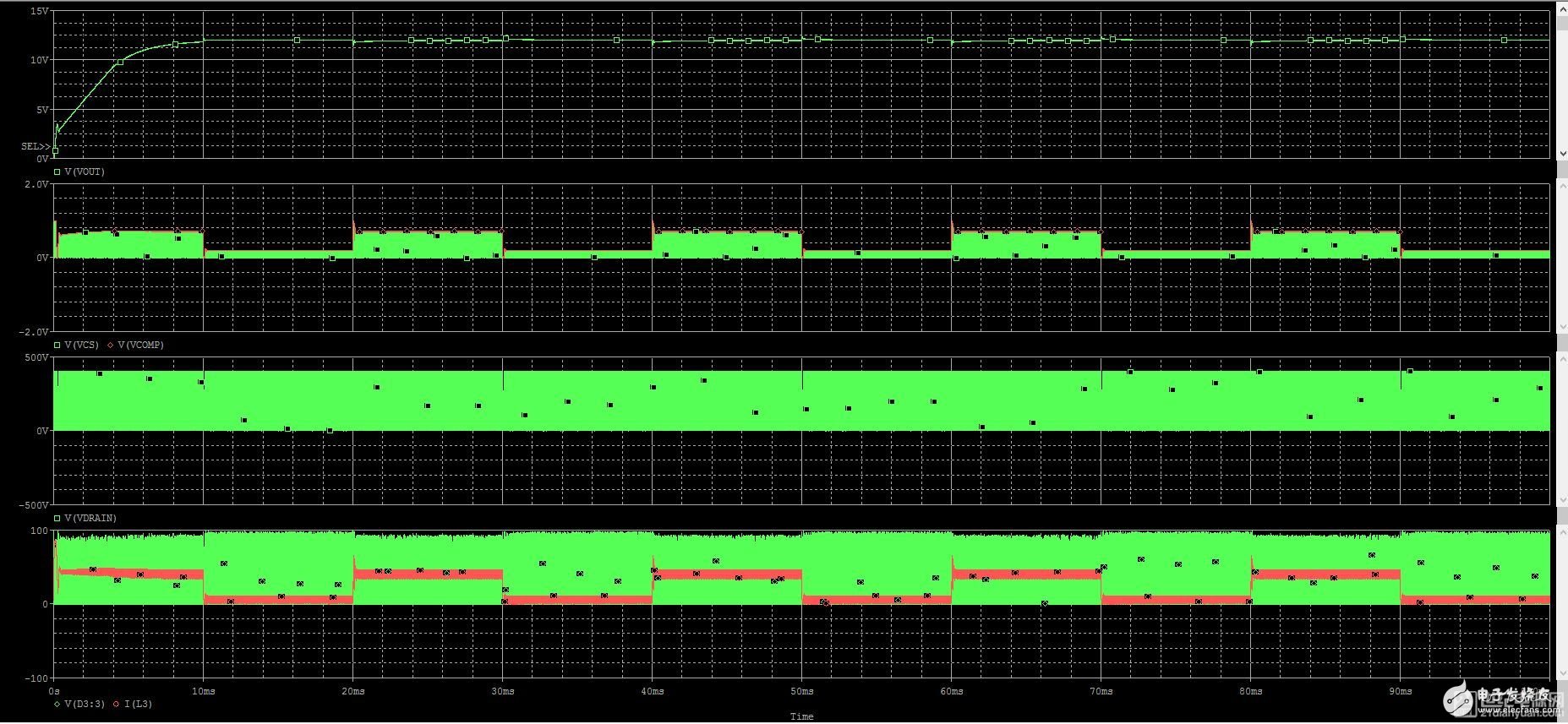
图9 正激模型在动态负载切换时的工作
展开切换时的细节,分别是 加负载 时:

图10 正激模型在负载增加时
和 减负载 时:

图11 正激模型在负载减少时
资料下载
仿真原理图: FORWARD_CM_TEST_V1.pdf
仿真原文件: FORWARD_CM_TEST_V1.zip
第三部分 传统半桥
传统 PWM 控制的半桥和全桥,一般由电压模式控制,常见的 IC 有 SG3525A,UC3825A。是拿 CT 上的电压斜坡和误差放大器的输出进行比较,然后得到一个占空比去控制管子的脉宽。由于要控制半桥和全桥,需要有两路互补的驱动信号,而且还要限制住两路信号的最大占空比。
SG3525A 的内部逻辑图如下:由 OSC 和触发器发出两路限制占空比的互补信号到 NOR 门。NOR 门默认输出为高电平,需将关断 PWM 的信号送到 NOR 门。在 SG3525A 中分别有下列几个送到 NOR 门用来关断输出,限制脉宽。
❶PWM 比较器的输出,误差放大器的电压 Vcomp 高于 Vramp 后发出高电平到触发器的 S,触发器发出高电平到 NOR 门,可以关闭当前输出。
❷OSC 发出的最大占空比限制,通过合理的 RT 和 CT 控制最大的占空比。
❸ULVO IC 欠压保护
❹SHUTDOWN 过流保护信号
❺触发器发出的两路互补驱动信号。
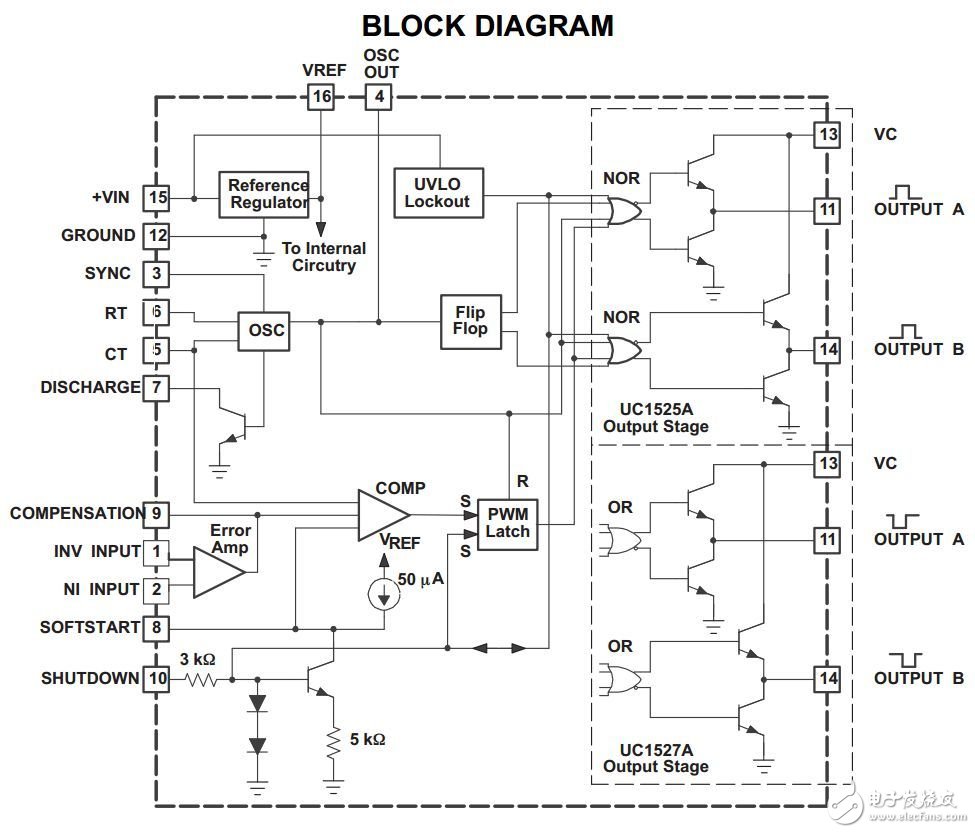
图11 SG3525A 的控制逻辑图
在仿真模型中,为了提高仿真速度,我 用可定义的三角波来作为 CT 上的电压斜坡。用 0.2V 和 2.5V 对斜坡电压进行比较,可得到用来限制占空比的信号 CLK。在通过触发器 U6 得到两路互补的驱动信号 A 和 B,分别都送到 NOR 门。在仿真中,我去掉了欠压保护的控制,控制驱动的 NOR 门只有三个条件用来关断当前的脉宽:
❶A 和 B 互补的驱动。
❷最大占空
❸PWM 比较的输出。
过流保护比较器暂时不使用,电压模式只控制占空比,动态性能要比电流模式差一点点。

图12 电压模式半桥控制模型
先来一个 0~20ms 的启机波形:

图13 电压模式半桥启机波形
展开细节:
✦V(Vout_ac) 输出电压
✦V(L2:1) 副边滤波电感上的电压
✦I(L2) 副边电感上的电流纹波
✦V(C10:2,H1:1) 是变压器两端的电压波形
✦I(C10) 是隔直电容上的电流

图14 电压模式半桥启机波形
做一个 10A~80A 的 10ms 一次的切换:
可以看到这个反馈参数不是很好,动态响应比较糟糕。

图14 电压模式半桥在动态负载切换时的波形
继续展开细节部分:
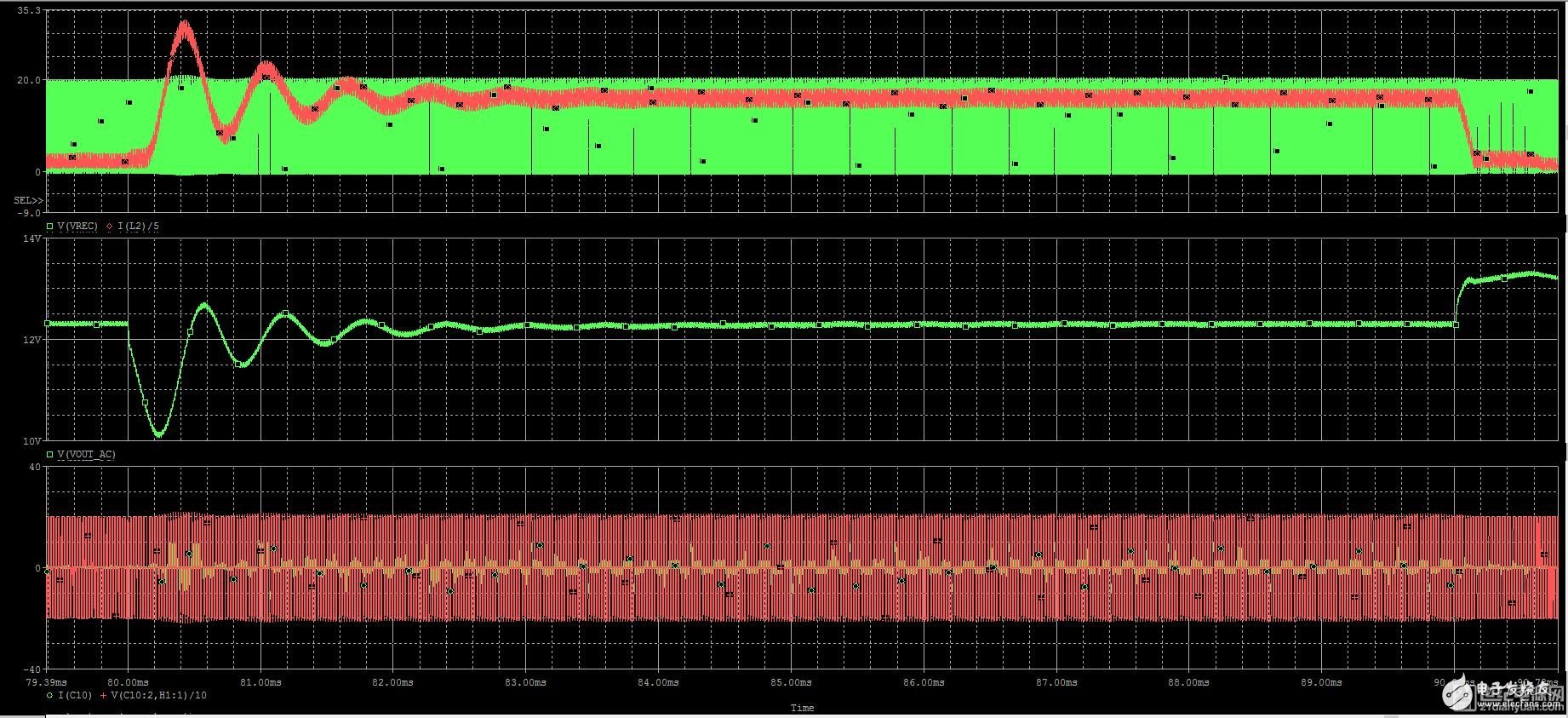
图15 电压模式半桥在动态负载切换时的波形
资料下载
仿真原文件: hb_uc1825a_v1.pdf
仿真原理图: HB_UC1825A_V1.zip
第四部分 电压模式全桥部分
控制模式几乎和半桥一致,只是用两路信号同时驱动对角的两颗管子,便于仿真就没有使用隔离驱动的电路,模型可见下图:
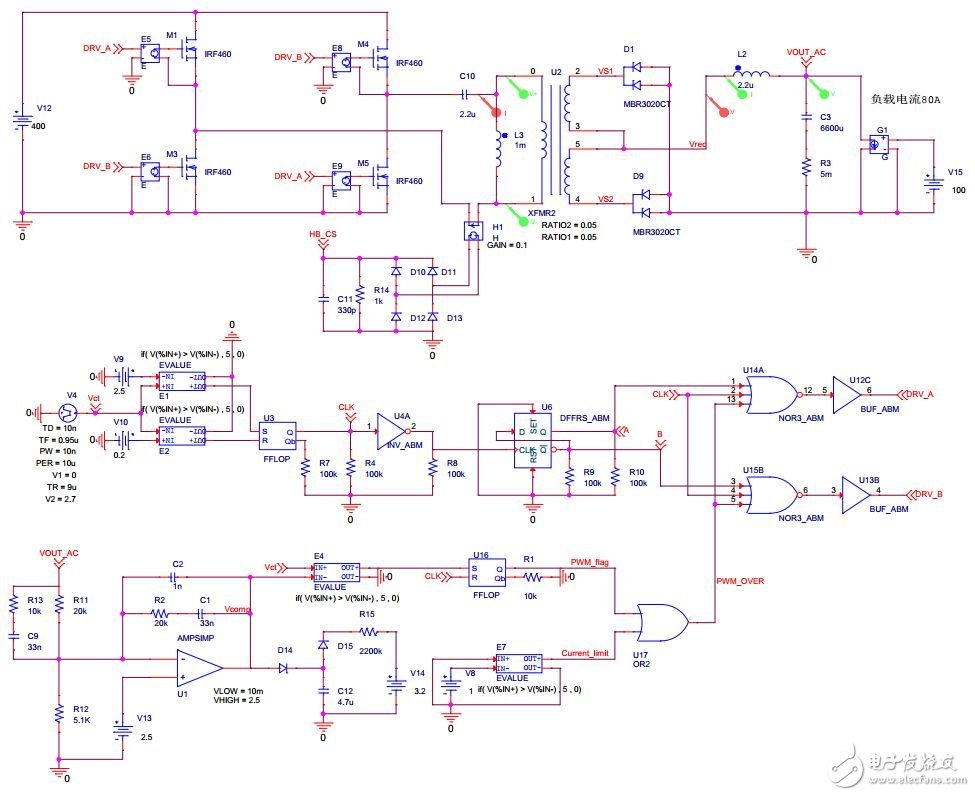
图15 电压模式全桥的控制模型
0~20ms 的上电波形:

图16 电压模式全桥的启机波形
展开细节:
✦I(L2) /10 是副边滤波电感上的纹波电路,便于观察除以10倍。
✦V(VREC) 是副边滤波电感上的电压。
✦V(U2:1,H1:1)/50 是原边变压器两端的电压,为了便于观察除以50倍。
✦I(C10) 是流过隔直电容的电流。
✦V(Vout_ac) 是输出电压(纹波蛮大的)。
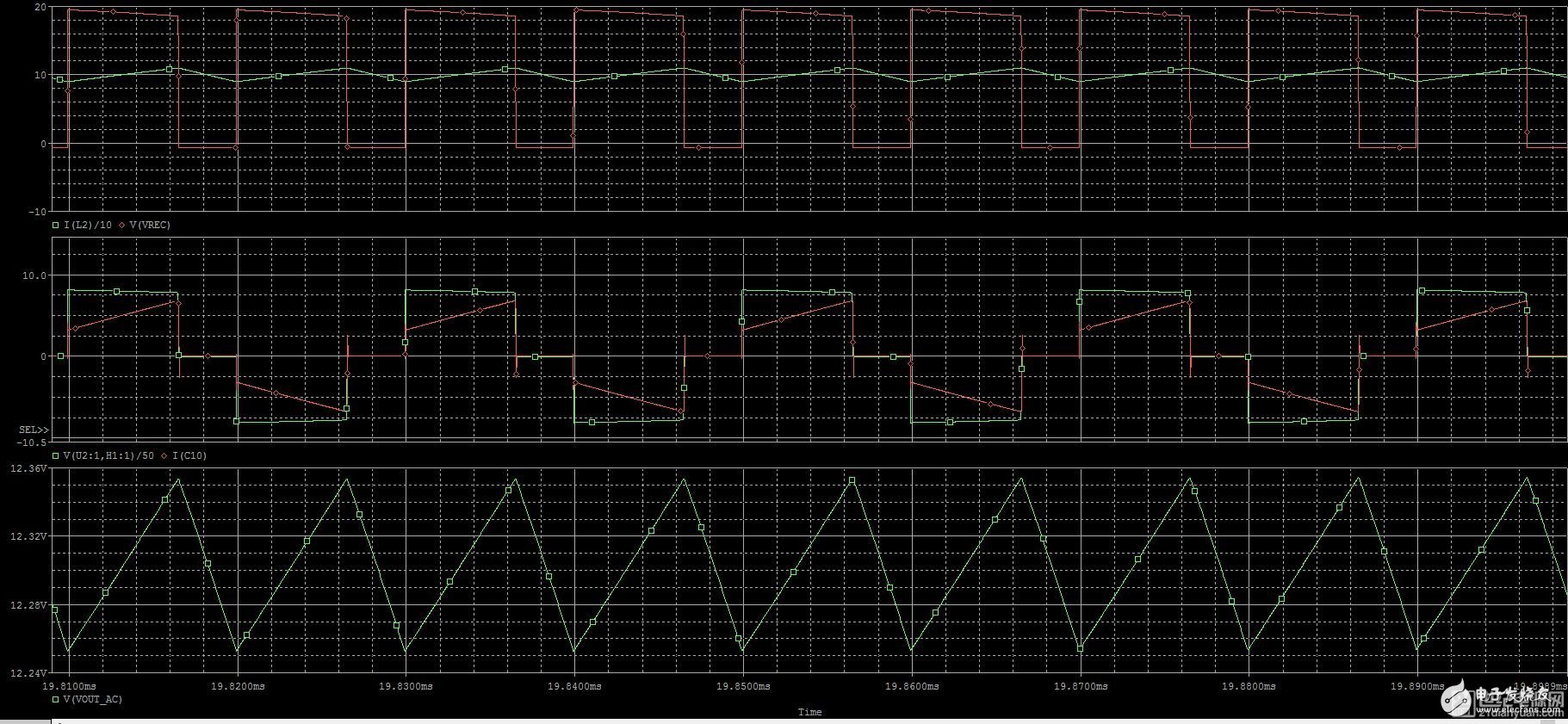
图17 电压模式全桥的启机波形
做一个 10A~100A 的 10ms 一次的动态切换:

图18 电压模式全桥的动态负载切换时波形
展开细节:
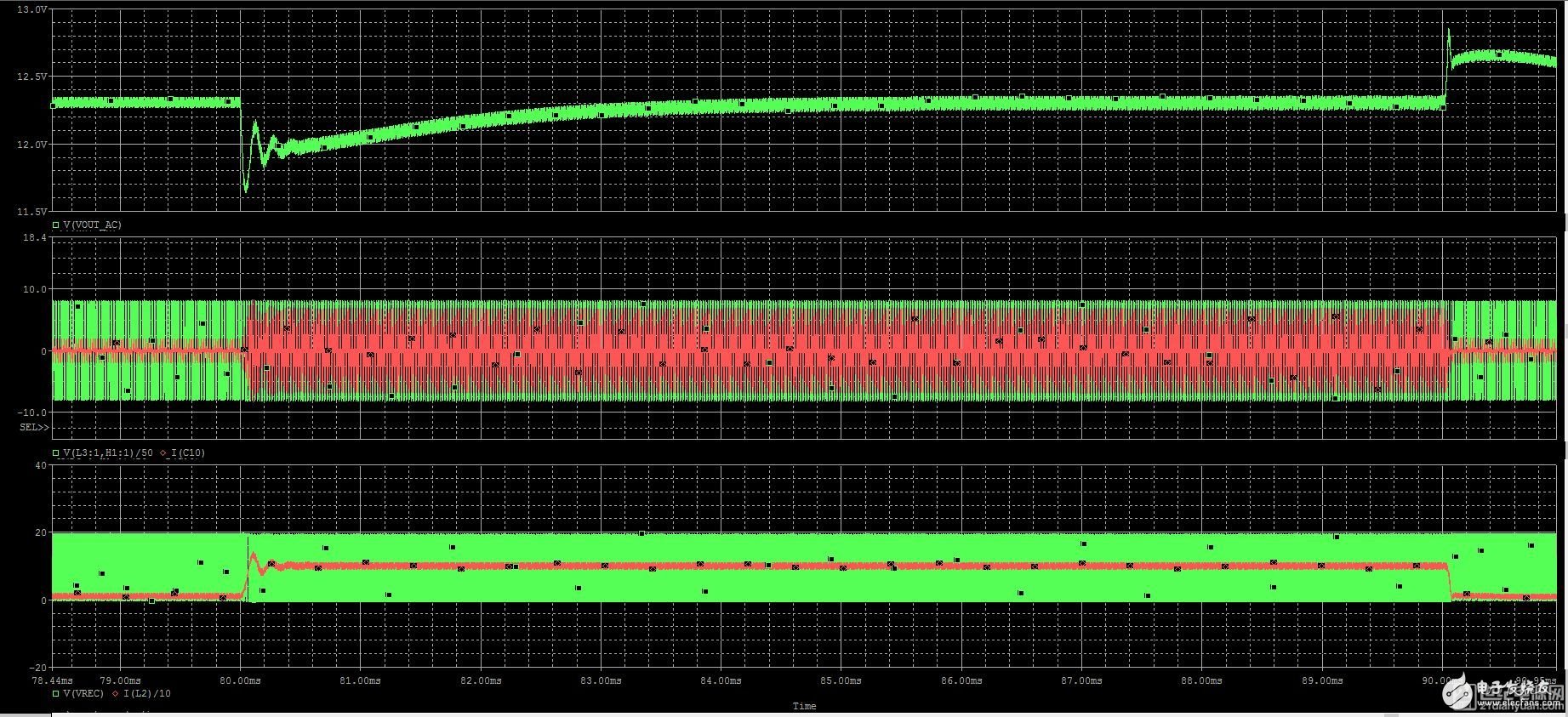
图19 电压模式全桥的动态负载切换时波形
资料下载
仿真原文件: fb_vm_test.zip
仿真原理图: fb_vm_test_v1.pdf
第五部分 电流模式的
全桥控制模型仿真
电流模式只是将原边电流引入控制,和误差放大器的给定做比较,当原边电流达到给定值时,关闭当前周期的脉宽。见控制模型:

图20 峰值电流模式全桥的控制模型
来一个0~20ms上电仿真:

图21 峰值电流模式全桥的启机波形
展开后的细节:
✦V(GAIN:OUT)PWM 比较器的给定是误差放大器的输出
✦V(E7:IN+) PWM 比较器电流信号
✦V(Vout_ac)输出电压
✦V(Vrec) 是副边滤波电感的电压
✦I(L1/10)是副边滤波电感上的电流,为了便于观察除以了10

图22 峰值电流模式全桥的启机波形
做 10A~100A 10ms 的切换:

图22 峰值电流模式全桥的在动态负载切换时的波形
展开细节:

图23 峰值电流模式全桥的在动态负载切换时的波形
全部0条评论

快来发表一下你的评论吧 !
