

中国科学院半导体所:研发3D异构传感系统实现多维信息准确识别。
电子说
描述
目标信息的高精度识别为机器在复杂环境中的感知和反应提供了重要支撑。目前,智能传感器多采用多功能和高密度集成的方式以获取更加精确、丰富的多维信息。然而,大多数多功能集成的传感集成器件多采用平面集成。这种布局方式忽略了不同位置之间的差异性,会导致这些传感集成器件收集的信息出现一定程度的时空误差,无法做到原位多维信息识别,进而影响信息识别的准确性。此外,随着传感器件多信息采集的集成度提升,生成的数据量呈爆炸式增长,给数据传输组件带来了巨大的压力。
为了解决这一问题,中国科学院半导体所王丽丽研究员团队借鉴中枢神经系统的信息处理方式,提出同时一种基于Te的3D垂直异构布局多模传感器的同时空多信号并行传输系统(HMPTs),实现了多信号无时空错位识别和高效并行传输(图1)。该系统进行了多功能传感单元的分布优化,完成了四个传感单元的三维垂直异构布局,实现了单个空间位点的多维度信息检测。此外,该系统可耦合并传输多个传感信号,与单通道单一传输系统相比,传输效率提高了4倍,功耗降低了1/3。
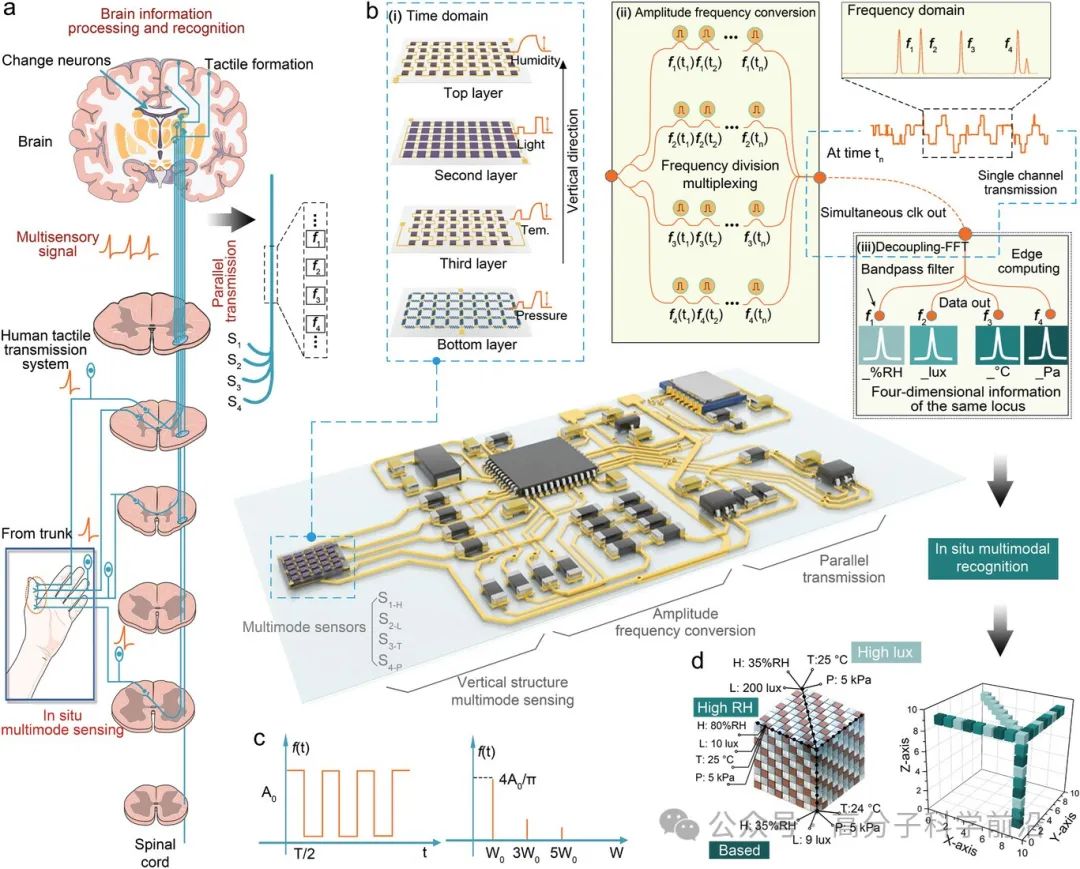
图1:同位多信号并行传输系统(HMPTs)。(a)人体中枢神经系统的同位感知和多信号并行传递策略。(b)同位多信号并行传输系统。(c)时域和频域中的方波示意图。(d)VR中混合材料块的材料属性重建。
作为机器获取数据的窗口,传感器件的精度在一定程度上决定了外部物理信号获取的准确性。为了实现高精度的、无时空错位的信号采集,研究人员选择了四种高性能传感单元,用于收集温度、湿度、压力和光这四种信息(图2)。若采用平铺集成架构,多功能集成传感器依旧无法实时正确表示给定空间位置的所有数据。为此,研究人员者充分考虑传感信号的特性以及传感器件的工作机制,设计了四种传感单元的3维垂直异构布局。这种布局方式既保证了四种传感单元垂直集成于同一空间坐标,又避免了四种信号的相互干扰,实现了对同一空间位点多维信息的实时连续检测。性能表征也证明表明传感器具有优异的响应特性,其中,湿度传感在小范围变化下便可实现3个量级的电信号变化,光传感的响应度可达52500 A/W,温度传感探测率为 0.57 Ω /℃,压力传感的灵敏度达24.7 kPa−1。为提高多信号传输效率,研究人员将通过传感器件获取的电信号进行了幅频转化,得到的各种频率的方波信号。随后,通过多个波形的耦合叠加,更好地利用单信道的带宽,避免大量使用单信道带来的传输压力。结果表明四种信号在并行传输中相互之间没有明显的干扰(图2)。
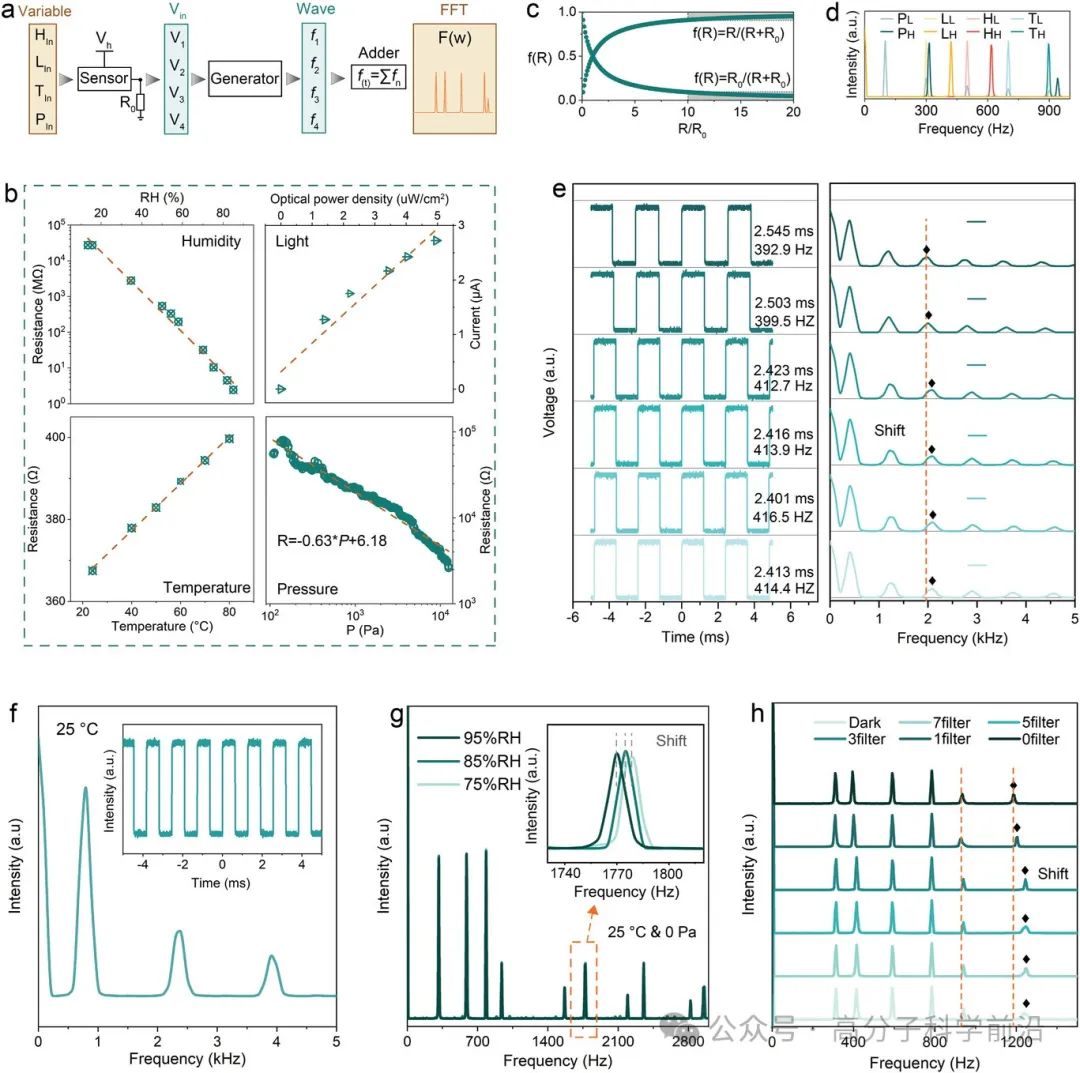 图2:HMPTs中的多信号感知和耦合。(a)HMPTs不同模块中信息转换的示意图。(b)HMS中传感单元的内部电阻和外部物理变量的函数关系,外部物理变量包含湿度、光强度、温度和压力。(c) 在分压器电路中,输出电压与参考电阻和传感器的内阻的关系。(d)不同传感信息在频谱上的分布区间。H 表示相应传感器的高电阻状态,而 L 表示低电阻状态。(e) 左:发生器输出的方波,当光传感在不同的光强度下。右:由左侧方波傅里叶变换得到的频域信号。(f)在 25 °C,单个温度传感生成的信号频谱。(g)在 25 °C且无外应力下,不同湿度下耦合三种信号的频域信息对比。(h) 在 25 °C 且无外应力下,不同光强度下耦合四种信号的频域信息比较。 系统的信号传输特性表征表明,相同硬件水平下,HMPTs的传输效率是单一信号传输的4倍,而功耗只有其1/3(图3)。此外,HMPTs信噪比为44.827 dB,与单一信号传输系统的信噪比(46.334 dB)相当,说明信号耦合对信号质量影响较小,也说明方式的可拓展性。
图2:HMPTs中的多信号感知和耦合。(a)HMPTs不同模块中信息转换的示意图。(b)HMS中传感单元的内部电阻和外部物理变量的函数关系,外部物理变量包含湿度、光强度、温度和压力。(c) 在分压器电路中,输出电压与参考电阻和传感器的内阻的关系。(d)不同传感信息在频谱上的分布区间。H 表示相应传感器的高电阻状态,而 L 表示低电阻状态。(e) 左:发生器输出的方波,当光传感在不同的光强度下。右:由左侧方波傅里叶变换得到的频域信号。(f)在 25 °C,单个温度传感生成的信号频谱。(g)在 25 °C且无外应力下,不同湿度下耦合三种信号的频域信息对比。(h) 在 25 °C 且无外应力下,不同光强度下耦合四种信号的频域信息比较。 系统的信号传输特性表征表明,相同硬件水平下,HMPTs的传输效率是单一信号传输的4倍,而功耗只有其1/3(图3)。此外,HMPTs信噪比为44.827 dB,与单一信号传输系统的信噪比(46.334 dB)相当,说明信号耦合对信号质量影响较小,也说明方式的可拓展性。 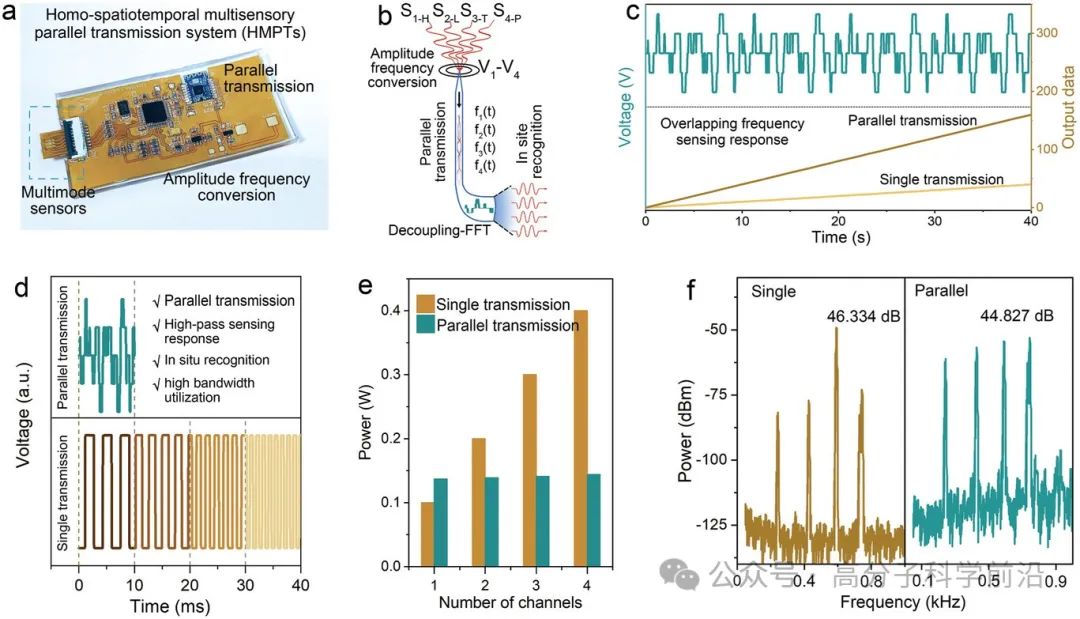 图3:HMPTs 的传输特性。(a)HMPTs 的光学照片。(b)HMPTs 示意图。(c)多信号并行传输的输出波形。并行传输和单一传输之间的输出数据比较。(d)并行传输与单一传输的效率对比。(e)功耗与集成传感单元数量的函数关系。(f)并行传输和单一传输的信噪比比较。 本研究制作了由干燥的铝块、背部激光照射的PDMS和浸润的木头组成混合材质块,作为实验验证的材料模型。图4所示的信号采集结果表明,平铺布局的多功能传感器所获取的四维信号之间存在5 mm的偏移,对应传感单元的平面分布距离。而采用3D垂直异构布局的HMPTs输出信号没有明显的偏差。
图3:HMPTs 的传输特性。(a)HMPTs 的光学照片。(b)HMPTs 示意图。(c)多信号并行传输的输出波形。并行传输和单一传输之间的输出数据比较。(d)并行传输与单一传输的效率对比。(e)功耗与集成传感单元数量的函数关系。(f)并行传输和单一传输的信噪比比较。 本研究制作了由干燥的铝块、背部激光照射的PDMS和浸润的木头组成混合材质块,作为实验验证的材料模型。图4所示的信号采集结果表明,平铺布局的多功能传感器所获取的四维信号之间存在5 mm的偏移,对应传感单元的平面分布距离。而采用3D垂直异构布局的HMPTs输出信号没有明显的偏差。 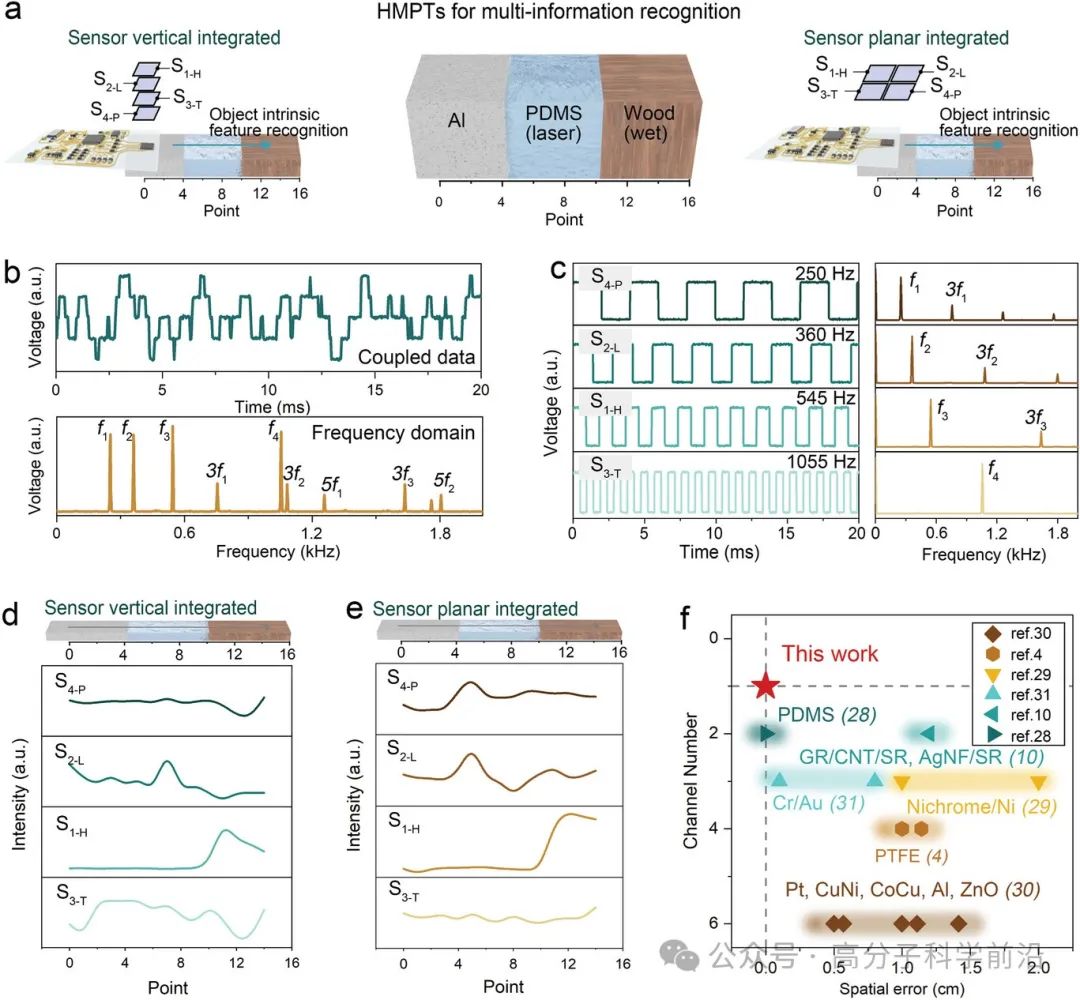 图4:无时空误差的混合材料识别。(a)混合材料块,由干铝、中间的激光照明 PDMS 和湿木组成。左图和右图分别显示了 HMS和平铺多功能传感器的传感单元分布。两组传感系统从点 0-14 收集信息,共 15个点。点之间的距离为0.25 mm。分别由(b)HMPTs 和(c)平铺多功能传感系统获得的初始位置的时域和频域信息。通过(d)HMPTs 和(e)平铺多功能传感系统收集每个点的混合材料信息。(f)本研究与以前研究之间的空间误差比较。 本研究还构建了接触物体和VR交互的场景,作为HMPTs的功能性验证。如图5所示,四种维度的信息可以用于传感系统判断与物体的接触状态,显示其在指导机器人完成对物体的触摸动作的应用价值。当器件接触物体后,HMPTs获取了丰富的材料信息。配合陀螺仪的辅助定位,HMPTs将真实的材质信息参数化,完成了VR空间中3D混合材料的重建过程,丰富了人机交互中VR 空间构建的方法。
图4:无时空误差的混合材料识别。(a)混合材料块,由干铝、中间的激光照明 PDMS 和湿木组成。左图和右图分别显示了 HMS和平铺多功能传感器的传感单元分布。两组传感系统从点 0-14 收集信息,共 15个点。点之间的距离为0.25 mm。分别由(b)HMPTs 和(c)平铺多功能传感系统获得的初始位置的时域和频域信息。通过(d)HMPTs 和(e)平铺多功能传感系统收集每个点的混合材料信息。(f)本研究与以前研究之间的空间误差比较。 本研究还构建了接触物体和VR交互的场景,作为HMPTs的功能性验证。如图5所示,四种维度的信息可以用于传感系统判断与物体的接触状态,显示其在指导机器人完成对物体的触摸动作的应用价值。当器件接触物体后,HMPTs获取了丰富的材料信息。配合陀螺仪的辅助定位,HMPTs将真实的材质信息参数化,完成了VR空间中3D混合材料的重建过程,丰富了人机交互中VR 空间构建的方法。 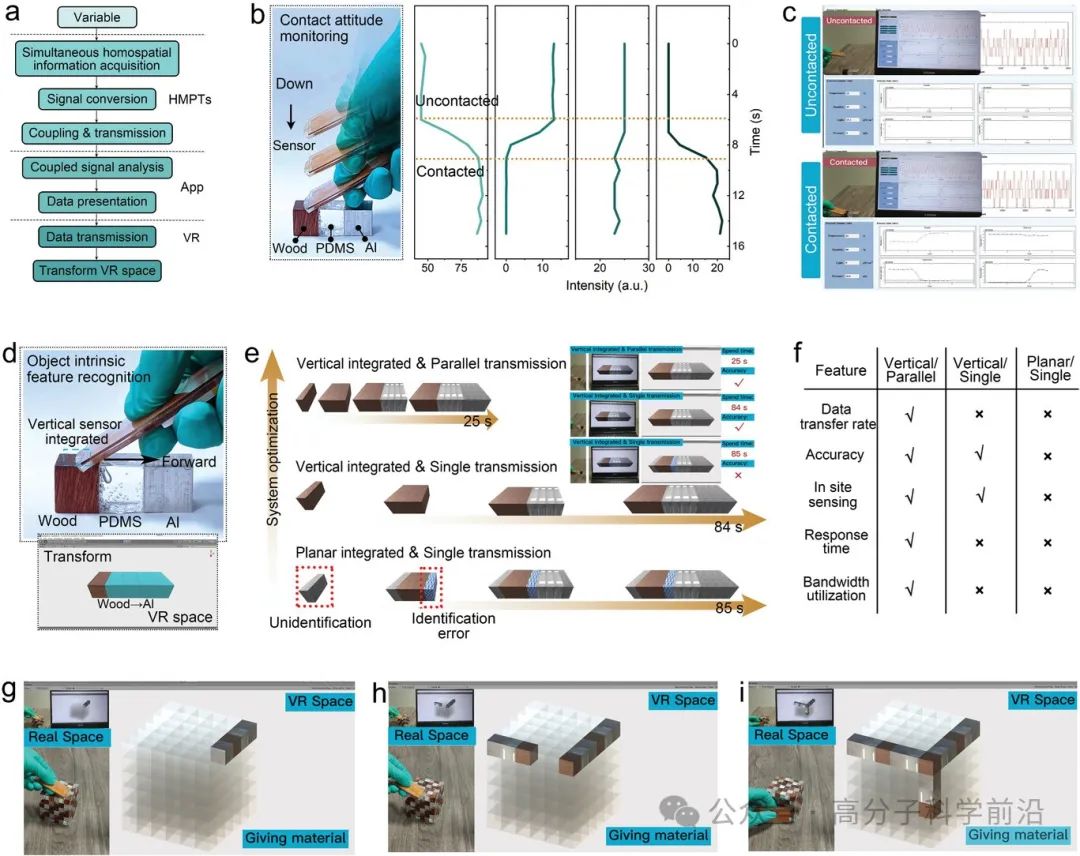 图5:基于HMPTs的VR交互。(a)VR交互的流程图。(b)使用HMPTs进行接触姿态监测。第一张图片是不同接触状态的照片,即Away、Close和Contacted。第二张图片是在HMS与湿木材接触期间,HMPTs记录了4个传感器信号。(c)用于接触姿态监测的HMPTs用户界面。(d)根据HMPTs捕获的数值特征用于VR中的材质构建。(e)VR中混合材质构建的对比和(f)三种系统之间的特性比较。三种系统分别基于HMPTs、基于单一传输的HMS和基于单一传输的平铺传感集成。在VR 中重建3D混合材质块,(g)x 轴,(h)z 轴,(i)y 轴。 小结 本研究受中枢神经系统的启发,提出了同为多传感并行传输系统(HMPTs),实现了多信号无时空错位识别和高效的并行传输。首先,3D垂直异构布局规避了多功能器件平面级联分布引起的信号时空偏差。其次,基于多信号并行传输的HMPT与同一系统的单通道传输相比,效率提高了4 倍,功耗降低了2/3,这说明了在传感端并行传输多个信号的巨大潜力。最终,该系统被用于识别混合材料,并作为人机交互窗口实现VR中的材质重构,证实了该系统在实际应用中的可行性。这一工作为提高机器感知精度、提高信息传输效率提供了经验参考。 该项目研究获得国家自然科学基金、中国科学院等项目的资助。相关工作以“3D Heterogeneous Sensing System for Multimode Parrallel Signal No-Spatiotemporal Misalignment Recognition”为题发表在《Advanced Materials》上。
图5:基于HMPTs的VR交互。(a)VR交互的流程图。(b)使用HMPTs进行接触姿态监测。第一张图片是不同接触状态的照片,即Away、Close和Contacted。第二张图片是在HMS与湿木材接触期间,HMPTs记录了4个传感器信号。(c)用于接触姿态监测的HMPTs用户界面。(d)根据HMPTs捕获的数值特征用于VR中的材质构建。(e)VR中混合材质构建的对比和(f)三种系统之间的特性比较。三种系统分别基于HMPTs、基于单一传输的HMS和基于单一传输的平铺传感集成。在VR 中重建3D混合材质块,(g)x 轴,(h)z 轴,(i)y 轴。 小结 本研究受中枢神经系统的启发,提出了同为多传感并行传输系统(HMPTs),实现了多信号无时空错位识别和高效的并行传输。首先,3D垂直异构布局规避了多功能器件平面级联分布引起的信号时空偏差。其次,基于多信号并行传输的HMPT与同一系统的单通道传输相比,效率提高了4 倍,功耗降低了2/3,这说明了在传感端并行传输多个信号的巨大潜力。最终,该系统被用于识别混合材料,并作为人机交互窗口实现VR中的材质重构,证实了该系统在实际应用中的可行性。这一工作为提高机器感知精度、提高信息传输效率提供了经验参考。 该项目研究获得国家自然科学基金、中国科学院等项目的资助。相关工作以“3D Heterogeneous Sensing System for Multimode Parrallel Signal No-Spatiotemporal Misalignment Recognition”为题发表在《Advanced Materials》上。
审核编辑 黄宇
-
中国科学院长春光机所首次亮相SEMICON China 20262026-03-30 689
-
中国科学院大学:实现可再生高灵敏度生物传感器新进展2024-08-14 2689
-
“超级光盘”在中国科学院上海光学精密机械研究所诞生2024-02-25 1976
-
中国科学院苏州纳米所:研发柔性水伏离子传感器用于可穿戴电子2023-08-10 2422
-
中国科学院近代物理研究所:科研人员制备出可穿戴柔性多孔汗液传感器2023-07-28 1647
-
中国科学院武汉分院的同步热分析仪应用案例2023-07-06 1177
-
中国科学院:金属所柔性应变传感器的手势识别应用研究取得进展2023-06-14 1869
-
中国科学院软件研究所所长赵琛:RISC-V 生态发展思考2022-06-23 2195
-
我司中标中国科学院兰州化学物理研究所精密真空高低温环境试验舱项目2021-12-29 1531
-
乌克兰科学院研发出电子束3D打印设备2021-08-17 1112
-
中国科学院半导体研究所2021年贺词2021-01-08 3809
-
中国科学院半导体研究所庆祝建所60周年!2020-09-25 2410
-
中国科学院电子学研究所2017年博士后招收启事2017-12-18 3410
-
中国科学院深圳先进技术研究院实习招聘2017-06-16 3008
全部0条评论

快来发表一下你的评论吧 !
