

借助TI DRV8162智能单半桥栅极驱动器优化机器人系统设计
描述
随着制造业的自动化程度不断提高,以及消费者在家中安装这些自动化系统,机器人市场将继续增长。公司纷纷开始在其工厂和仓库中实现制造系统的自动化,并适应未来机器人与人类进行更多互动的情形。
制造机器人的设计工程师了解,有数百种不同类型的机器人系统。机器人种类繁多,从功率只有几瓦的小型辅助机器人到自主移动机器人、类人机器人以及功率高达 4kW 及更高的重型工业机器人。
协作机器人、移动机器人、类人机器人和工业机器人有各种形状和尺寸功率级别范围为 10W 至 ≥4kW
机器人制造商在开发高级系统时面临几项设计挑战。上述机器人应用通常使用 48V 电压轨并支持 2kg 至 40kg 的有效载荷。在设计更高负载时,工程师必须同时考虑机械和设计影响,以适应更高的功率级别。较高的电流可能会因电磁干扰 (EMI) 或开关损耗过高而导致系统性能低下。功能安全也是一个重要因素,因为机器人经常在有人类存在的环境中使用。无论是在生产车间还是在消费者的家中,设计能够在必要时安全关闭的系统都非常重要。
借助TI DRV8162 等智能单半桥栅极驱动器,您可以灵活地创建能够承受大功率和电压范围,同时降低 EMI 并符合功能安全标准的集成系统。
面向各种功率级别的设计
我们的智能栅极驱动器采用 TI 的 IDRIVE 可调栅极驱动电流方案,可在多个级别的栅极电流中控制 MOSFET 压摆率。DRV8162 具有 16 种可调的粒度设置(如图 2 所示),可控制何时选择 MOSFET 和终端应用。有关 IDRIVE 的更多详细信息,请阅读了解智能栅极驱动。

图 2. DRV8162 的 16 个 IDRIVE 设置和可编程的
拉电流/灌电流比可省去外部无源器件并简化设计
使用方程式 1,您可以通过 MOSFET 的栅漏电荷 (Qgd) 规格以及 MOSFET 漏极和源极之间最大电压的上升和下降时间,估算出哪个 IDRIVE 设置更适合您的系统。这些值根据您的系统性能要求而变化。

方程式 1
如果 IDRIVE 不靠近您使用的器件中的栅极驱动设置,您将需要额外的无源器件(包括栅极电阻器)来实现所需的栅极电流。这些额外元件增加了总体物料清单成本,并增加了印刷电路板 (PCB) 的尺寸,这可能会对协作机器人、移动机器人和类人关节中的小型设计造成影响。
使用同类半桥栅极驱动器时,需要使用外部栅极电阻器,因为它们仅提供固定电流或两到四个分立式设置。DRV8162 驱动器中的 16 种栅极驱动设置和可编程拉/灌比率让您可以灵活地移除外部无源器件并简化设计。
宽 Qgd 支持使您可以在具有不同 MOSFET 的各种低功率、中功率和高功率机器人平台上使用驱动器,而无需更改每个系统中的栅极驱动器设计。DRV8162 的栅极拉电流和灌电流可分别设置为低至 16mA 和 32mA,最高可达 1024mA 和 2048mA。例如,48V 系统中的 1V/ns 压摆率可用于计算 48ns Trise/Tfall。这会产生该器件可以支持的 0.77nc/1.54nC 至 49.15nC/98.30nC MOSFET Qgd 范围。
提高系统性能
与三相集成式栅极驱动器相比,DRV8162 的单半桥架构使其能够更靠近 FET。图 3 展示了两种圆形 PCB 设计,其中比较了三相与单相半桥实现。

图 3. 采用三相栅极驱动器实现方案的圆形 PCB 设计
左侧是 MCU、驱动器和 FET,右侧是单个半桥设计
将栅极驱动器放置在更靠近 FET 的位置可缩短布线长度,提高信号完整性,并减少栅极和源极节点上的寄生效应。更短的路径还有助于降低布线电感的影响,从而降低振铃和 EMI。
此外,DRV8162 有助于通过 20ns 的死区时间改善系统效率和声学性能,还有助于扩大工作脉宽调制占空比范围,从而扩大速度范围,同时提高电机的可用电压。更短的死区时间还可以更大限度减少二极管导通损耗,提高系统效率,并减少电机电流失真,从而降低可闻噪声。这些效果可提高系统的整体性能和效率。
机器人中的 STO
许多机器人与人类并肩作战,因此在发生电源故障、电涌或短路时关闭系统至关重要。在器件扭矩无法预测的情况下,电机驱动应用出现故障可能会导致危险情况。由于一些机械在涉及重负载的工业环境中运行,因此必须能够安全关闭并防止意外启动。
国际电工委员会 (IEC) 61800-5-2 标准定义了电路设计中被称为安全扭矩关断 (STO) 的安全功能,该功能可防止向电机供电。DRV8162 和 TI 的 DRV8162L 采用了分离电源架构,可帮助您在系统中实施 STO。
在更高功率的设计中,工程师可以参考适用于集成电机驱动器的 48V、4kW 小型三相逆变器参考设计 (TIDA-010956),该设计采用了具有 48VDC 输入电压和 85ARMS 输出电流的 DRV8162L。如图 4 所示,该设计包含建议的 STO 概念、并联 FET、高功率和单个半桥栅极驱动器。
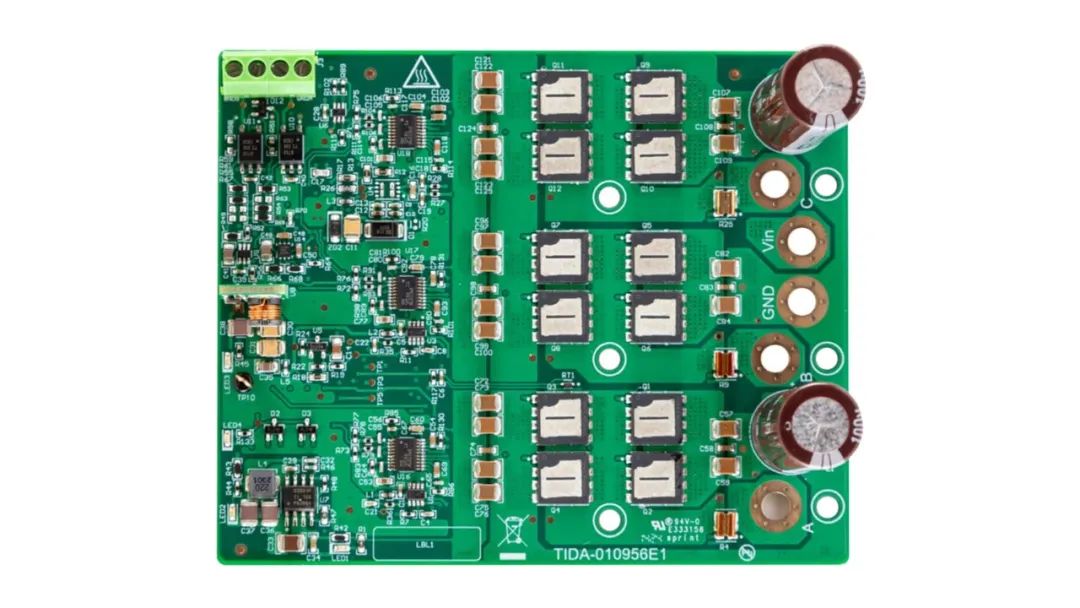
图 4. TI 的三相逆变器参考设计 (TIDA-010956)
结语
机器人的现有电机设计采用分立式实现来满足安全要求,这会增加电路板尺寸和物料清单数量。为了提高各种形状和尺寸的机器人的效率和安全性,需要使用 DRV8162 这类更小、更安全的集成式栅极驱动器。新款智能单半桥栅极驱动器助力设计人员将功率从 10W 扩展到 4kW 及更高,同时缩小 PCB 尺寸,提高性能和安全性,并提供灵活性,从而在未来多年内加速机器人创新。
-
深入解析DRV870xD - Q1汽车半桥栅极驱动器2026-01-09 360
-
DRV8106-Q1:汽车半桥智能栅极驱动器的技术剖析与应用指南2026-01-08 530
-
DRV816x系列半桥智能栅极驱动器:功能、应用与设计要点2026-01-07 457
-
DRV8363:三相智能栅极驱动器的卓越之选2026-01-06 471
-
DRV8702D-Q1 汽车用 47V 半桥智能栅极驱动器技术手册2025-10-16 874
-
DRV8714-Q1智能半桥栅极驱动器概述2025-10-14 1097
-
Texas Instruments DRV816x半桥智能栅极驱动器数据手册2025-07-10 916
-
实现隔离式半桥栅极驱动器的设计基础2018-10-16 3055
全部0条评论

快来发表一下你的评论吧 !
