

三分钟了解惯性导航系统、加速度计、陀螺仪的工作原理
EMC/EMI设计
描述
1. 惯性导航系统 INS( Inertia Navigation System,以下简称惯导)
惯导是一种利用惯性传感器测量载体的比力及角速度信息,并结合给定的初始条件实时推算速度、位置、姿态等参数的自主式导航系统.具体来说惯性导航系统属于一种推算导航方式。即从一已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置,因而可连续测出运动体的当前位置。
常规惯性导航系统采用加速度计和陀螺仪传感器来测量载体参数,而加速度计惯性导航系统主要由加速度计组成,该系统舍弃陀螺仪,用加速度计代替陀螺仪作为惯性测量元件,国际上有学者研究用多个加速度计替代陀螺仪的方案。
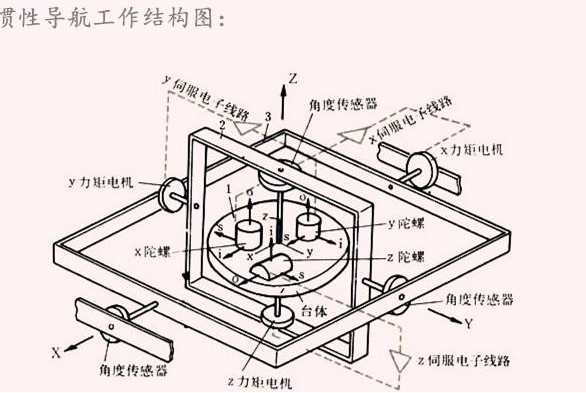
惯导中的陀螺仪用来形成一个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度经过对时间的一次和分得到速度,速度再经过对时间的一次积分即可得到距离。
惯性导航系统有如下主要优点:
(1)由于它是不依赖于任何外部信息,也不向外部辐射能量的自主式系统,故隐蔽性好已不受外界电磁干扰的影响;
(2)可全天流全球、全时间地工作于空中地球表面乃至水下;
(3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低;
(4)数据更新率高、短期精度和稳定性好。
其缺点是:
(1)由于导肮伯息经过积分而产生,定位误差随时间而增大,长期精度差;
(2)每次使用之前需要较长的初始对准时间;
(3)设备的价格较昂贵;
(4)不能给出时间信息。
2.加速度计:
加速度计有两种:一种是角加速度计,是由陀螺仪(角速度传感器)改进的。另一种就是线加速度计。
加速度传感器利用重力加速度,可以用于检测设备的倾斜角度,但是它会受到运动加速度的影响,使倾角测量不够准确,所以通常需利用陀螺仪和磁传感器补偿。同时磁传感器测量方位角时,也是利用地磁场,当系统中电流变化或周围有导磁材料时,以及当设备倾斜时,测量出的方位角也不准确,这时需要用加速度传感器(倾角传感器)和陀螺仪进行补偿。
通过测量由于重力引起的加速度,你可以计算出设备相对于水平面的倾斜角度。通过分析动态加速度,你可以分析出设备移动的方式。
加速度传感器可以检测交流信号以及物体的振动,人在走动的时候会产生一定规律性的振动,而加速度传感器可以检测振动的过零点,从而计算出人所走的步或跑步所走的步数,从而计算出人所移动的位移。并且利用一定的公式可以计算出卡路里的消耗。
用加速度传感器检测手持设备的振动/晃动幅度,当振动/晃动幅度过大时锁住照相快门,使所拍摄的图像永远是清晰的。
3. 角速度传感器-陀螺仪
在四轴上安装陀螺仪,可以测量四轴倾斜的角速度,将角速度信号进行积分便可以得到四轴的倾角。由于陀螺仪输出的是四轴的角速度,不会受到四轴振动影响。因此该信号中噪声很小。四轴的角度又是通过对角速度积分而得,这可进一步平滑信号,从而使得角度信号更加稳定。因此四轴控制所需要的角度和角速度可以使用陀螺仪所得到的信号。由于从陀螺仪的角速度获得角度信息,需要经过积分运算。如果角速度信号存在微小的偏差,经过积分运算之后,变化形成积累误差。这个误差会随着时间延长逐步增加,最终导致电路饱和,无法形成正确的角度信号.
角度积分漂移校正
利用加速度计所获得的角度信息θg 与陀螺仪积分后的角度θ进行比较,将比较的误差信号经过比例Tg放大之后与陀螺仪输出的角速度信号叠加之后再进行积分。从图中的框图可以看出,对于加速度计给定的角度θg,经过比例、积分环节之后产生的角度θ必然最终等于θg。由于加速度计获得的角度信息不会存在积累误差,所以最终将输出角度θ中的积累误差消除了。
为了避免输出角度θ跟着θg过长,可以采取以措施:
在控制电路和程序运行的开始,尽量保持四轴在水平状态,这样一开始就使得输出角度θ与θg相等。此后,加速度计的输出只是消除积分的偏移,输出角度不会出现很大的偏差。
总的来说,加速度计在较长时间的测量值(测量飞行器的角度)是正确的,然而在较短时间内由于信号噪声以及运动方向的加速度存在,会有很大的误差。具体表现为加速度静止不动时值很稳定,但是移动起来数据波动很大。陀螺仪测得的是角速度,在较短时间内则比较准确,而较长时间则会有积分漂移产生误差。因此,刚才所说需要两者(相互调整)融合来确保姿态角的正确。
4.电子罗盘
但是即使使用了加速度计和陀螺仪,也只可以用于测得飞机的俯仰和横滚角度。对于偏航角度,由于偏航角和重力方向正交,无法用加速度计测量得到。(加速度计是根据测某方向重力加速度分量与重力加速度的关系来求得角度)这意味着在这个维度上没有一个可靠的长期值来矫正陀螺仪的值,而只用陀螺仪测的角度会存在积分漂移的问题!因此还需要采用其他设备来校准测量偏航角度的陀螺仪的漂移值。校准的设备可以使用磁罗盘计(电子磁罗盘,对磁场变化和惯性力敏感)或者GPS。GPS数据更新较慢(1Hz到10Hz),并且短时间内存在误差。所以用GPS只能长时间的在地面跟踪较为稳定和慢速的飞行器,如果需要矫正航向我们就只有使用电子罗盘了。(当然也存在着不需要矫正的情况,我这里就没矫正,使用陀螺仪积分的角度来凑合)
三维磁阻传感器(电子罗盘)用来测量地球磁场,倾角传感器是在磁力仪非水平状态时进行补偿;MCU处理磁力仪和倾角传感器的信号以及数据输出和软铁、硬铁补偿。该磁力仪是采用三个互相垂直的磁阻传感器,每个轴向上的传感器检测在该方向上的地磁场强度。可以把它简单理解成一个指南针,无论在哪里你都能找到南方,然后根据就可以知道飞机的机头偏离南方多少度角来锁定航向。
-
MEMS加速度计与MEMS陀螺仪的区别2024-02-17 7354
-
基于MEMS的加速度计和陀螺仪设备是如何工作的2021-11-12 2464
-
初识加速度计与陀螺仪2021-09-28 2421
-
介绍加速度计和陀螺仪的数学模型和基本算法2021-08-06 2572
-
AN-688: iMEMS®加速度计和陀螺仪的相位与频率响应2021-03-21 1792
-
MEMS加速度计和MEMS陀螺仪的区别2020-04-16 3162
-
请问为什么陀螺仪需校准而加速度计不需?2019-07-04 5655
-
加速度计和陀螺仪的参数意义2019-06-25 7892
-
一分钟弄懂!动画演示陀螺仪的工作原理2018-10-11 12016
-
加速度计与陀螺仪互补滤波与卡尔曼滤波核心程序2017-01-22 1269
-
加速度计和陀螺仪传感器_原理_检测及应用2016-06-17 1567
-
关于陀螺仪和加速度计的选择问题2015-11-27 12116
-
MEMS加速度计和陀螺仪的相位与频率响应2011-11-25 2046
-
基于加速度计的无陀螺惯性导航系统的研究2009-12-02 5918
全部0条评论

快来发表一下你的评论吧 !
