

l298n驱动电机的工作原理_L298N驱动步进电机程序
控制电路
描述
步进电机简介
步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。由于步进电动机能直接接受数字量的控制,所以特别适宜采用微机进行控制。
(一)步进电机的种类
目前常用的有三种步进电动机:
(1)反应式步进电动机(VR)反应式步进电动机结构简单,生产成本低,步距角小;但动态性能差。
(2)永磁式步进电动机(PM)永磁式步进电动机出力大,动态性能好;但步距角大。
(3)混合式步进电动机(HB)混合式步进电动机综合了反应式、永磁式步进电动机两
者的优点,它的步距角小,出力大,动态性能好,是目前性能最高的步进电动机。它有时也称作永磁感应子式步进电动机。
(二)步进电动机的工作原理
图X1三相反应式步进电动机结构示意图
1——定子 2——转子 3——定子绕组
图x1是最常见的三相反应式步进电动机的剖面示意图。电机的定子上有六 个均布的磁极,其夹角是60º。各磁极上套有线圈,按图1连成A、B、C三相绕组。转子上均布40个小齿。所以每个齿的齿距为θE=360º/40=9º,而定子每个磁极的极弧上也有5个小齿,且定子和转子的齿距和齿宽均相同。由于定子和转子的小齿数目分别是30和40,其比值是一分数,这就产生了所谓的齿错位的情况。若以A相磁极小齿和转子的小齿对齐,如图,那么B相和C相磁极的齿就会分别和转子齿相错三分之一的齿距,即3º。因此,B、C极下的磁阻比A磁极下的磁阻大。若给B相通电,B相绕组产生定子磁场,其磁力线穿越B相磁极,并力图按磁阻最小的路径闭合,这就使转子受到反应转矩(磁阻转矩)的作用而转动,直到B磁极上的齿与转子齿对齐,恰好转子转过3º;此时A、C磁极下的齿又分别与转子齿错开三分之一齿距。接着停止对B相绕组通电,而改为C相绕组通电,同理受反应转矩的作用,转子按顺时针方向再转过3º。
依次类推,当三相绕组按A→B→C→A顺序循环通电时,转子会按顺时针方向,以每个通电脉冲转动3º的规律步进式转动起来。若改变通电顺序,按A→C→B→A顺序循环通电,则转子就按逆时针方向以每个通电脉冲转动3º的规律转动。因为每一瞬间只有一相绕组通电,并且按三种通电状态循环通电,故称为单三拍运行方式。单三拍运行时的步矩角θb为30º。三相步进电动机还有两种通电方式,它们分别是双三拍运行,即按AB→BC→CA→AB顺序循环通电的方式,以及单、双六拍运行,即按A→AB→B→BC→C→CA→A顺序循环通电的方式。六拍运行时的步矩角将减小一半。反应式步进电动机的步距角可按下式计算:
θb=360º/NEr(x-1)
式中 Er——转子齿数, N——运行拍数,N=km,m为步进电动机的绕组相数,k=1或2。
(三)步进电动机的特性
(1)步进电动机必须加驱动才可以运转,驱动信号必须为脉冲信号,没有脉冲信号的时候,步进电动机静止,如果加入适当的脉冲信号,就会以一定的角度(称为步角)转动。转动的速度和脉冲的频率成正比。
(2)步进电机具有瞬间启动和急速停止的优越特性。 (3)改变脉冲的顺序,可以方便的改变转动的方向。
l298n驱动电机的工作原理
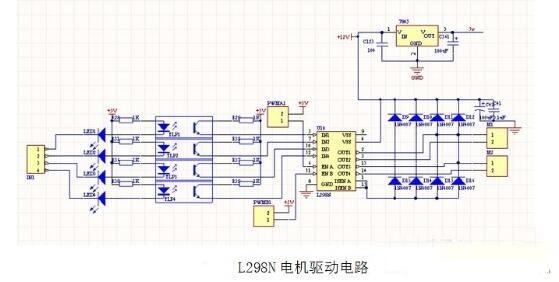
工作原理分析:
在步进电机驱动模块中,采用了带光耦隔离,抗干扰能力强的TLP521作为隔离电流保护芯片,其中L297的17脚通过给高低电平来控制步进电机的正反转,而18脚为步进时钟输入端,控制每个步数的时间增量,19脚步进电机的半步或者整步的选择,10脚为使能控制端,来控制电机的启停,而经过内部包含 4 信道逻辑驱动电路、高压、大电流双 H 桥式驱动器L298来控制电机的正反转;利用L298实现电机驱动及其正反转,并采用二极管进行续流保护,利用7805提供5v电源给控制器和l298芯片供电,这个电路在工作时间长的情况下容易发热,造成电路不稳定性缺点。
主要功能特点是:
关键芯片:L298N 双H 桥直流/步进电机驱动芯片
L298N 芯片工作电压:DC 4.5~5.5V。
电机驱动电源电压DC 5--35V。
电源输入正常时有LED 灯指示。
PCB尺寸:4.4*5.0cm
最大输出电流2A(瞬间峰值电流3A),最大输出功率25W。
输出正常时电机运转有LED 灯指示。
具有二极管续流保护。
可单独控制2台直流电机或1台两相4 线(或6 线)步进电机。
可以采用并联接法控制一台高达3A 的直流电机。
可实现电机正反转。
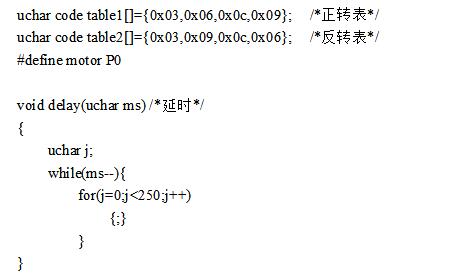
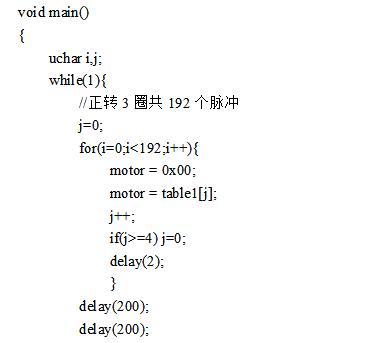
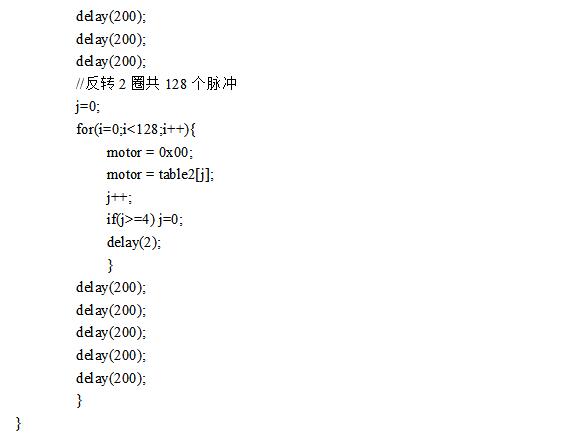
L298N驱动步进电机程序

-
 neunnnn
2019-05-25
0 回复 举报如果接一个两相四线的步进电机,他的output怎么连接啊 收起回复
neunnnn
2019-05-25
0 回复 举报如果接一个两相四线的步进电机,他的output怎么连接啊 收起回复
-
L298N 电机驱动模块--配套程序2023-10-18 1080
-
Arduino实验17 L298N电机驱动模块2023-03-16 1100
-
L298N电机驱动的使用2021-11-23 1928
-
L298N驱动步进电机 相关资料推荐2021-07-08 1684
-
如何使用l298n模块去驱动步进电机?2021-07-07 2003
-
基于L298N电机驱动模块的原理及使用案例2020-10-18 55983
-
L298N电机驱动器的详细资料合集免费下载2018-11-13 2357
-
L298N电机驱动模块程序2018-03-02 1651
-
L298N中文资料汇总_L298N引脚图及功能_工作原理_特性参数及典型驱动电路2017-12-11 594076
-
L298N电机驱动模块.(4).PrjPcb2016-08-05 2523
-
L298N电机驱动模块指导书2016-05-23 2078
-
L298N电机驱动模块参考程序2015-12-24 1094
全部0条评论

快来发表一下你的评论吧 !
